龙驭球结构力学Ⅱ第3版知识点课后答案.docx
《龙驭球结构力学Ⅱ第3版知识点课后答案.docx》由会员分享,可在线阅读,更多相关《龙驭球结构力学Ⅱ第3版知识点课后答案.docx(12页珍藏版)》请在冰豆网上搜索。
龙驭球结构力学Ⅱ第3版知识点课后答案
第11章静定结构总论
11」复习笔记
•、几何构造分析与受力分析之间的对偶关系
L从计算自由度W的力学含义和几何含义看对偶关系
(1)W的几何含义
*,=各部件的自由度总数-全部约束数。
(2)W的力学含义
W=各部件的平衡方程总数一未知力总数。
(3)根据W的数值,可对体系的静力特性得出下列结论
1W>0,平衡方程个数大于未知力个数,体系不是都能维持平衡,体系为几何可变;
2WVO,平衡方程个数小于未知力个数,体系如能维持平衡,体系有多余约束,是超静定的:
3W=0,平衡方程个数等于未知力个数,考虑方程组的系数行列式D
当DR.方程组有唯•解,体系几何不变且无多余约束:
当D=0,方程组无解或有无穷多解,体系几何可变且有多余约束。
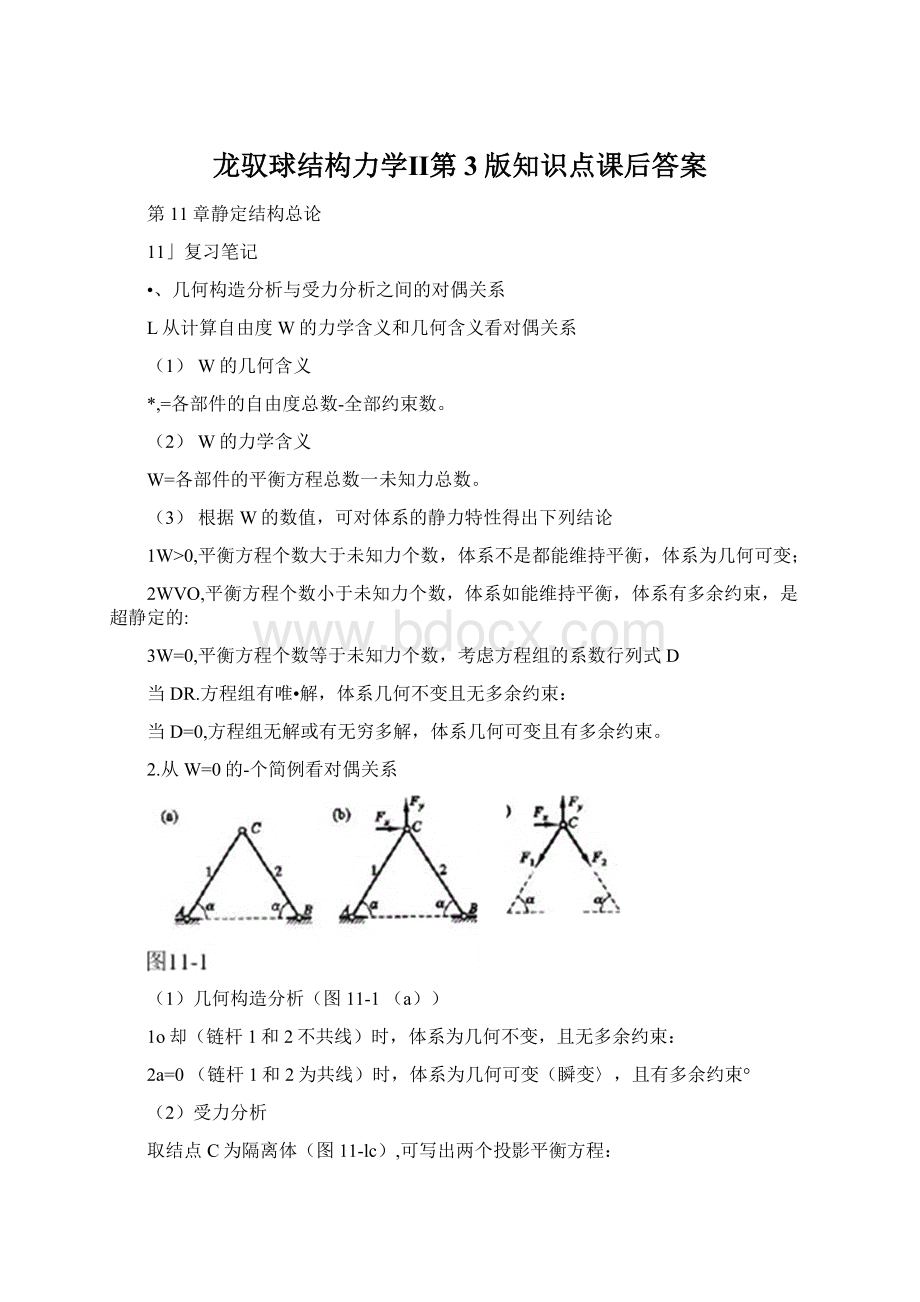
2.从W=0的-个简例看对偶关系
(1)几何构造分析(图11-1(a))
1o却(链杆1和2不共线)时,体系为几何不变,且无多余约束:
2a=0(链杆1和2为共线)时,体系为几何可变(瞬变〉,且有多余约束°
(2)受力分析
取结点C为隔离体(图11-lc),可写出两个投影平衡方程:
F1cosa—Fgcosa=Fx
Fisinct+F/sinoc=Fy
下而分为两种情况讨论
1
时(两根链杆1和2不共线〉
2a=0时(两根链杆共线)
当荷载片丸时,方程组无解;
如果考虑Fy=O而只有水平荷载Fx作用的特殊情况,
此时解为:
F】=F2+Fx=任总值。
二、零载法
1.零载法的作法农述
对于W=o的体系,如果是几何不变的,则在荷载为零的情况下,它的全部内力都为零;反之,如果是几何可变的,则在荷载为零的情况下,他的某些内力可不为零。
2.零较法适用体系
零载法是针对w=0的体系,用静力法来研究几何构造问题.用平衡方程的解的唯•性来检验其几何不变性的方法。
3.从虚功原理角度看零载法
由于载荷为零,因此虚功方程左边只有•项
Fx*Ax=O
(1)与玖相应的约束是非多余约束,A#0,解得F=0:
(2)与兔相应的约束是多余约束,△=(),贝IJF等于任意值。
三、空间杆件体系的几何构造分析
L空间杆件体系的基本组成规律
(1)四个点之间的连接方式
规律1:
不共面的四个点用四个链杆两两相连,则所组成的铁结四面体空间体系是•个几何不变的整体,且没有多余约束。
(2)-点与-刚体之间的连接方式
规律2:
空间中•点与•刚体用三根链杆相连,且三链杆不在同•平面内,则组成的空间体系是•个几何不变的整体,且无多余约束。
(3)两个刚体之间的联接方式
规律3:
•刚体与另•刚体(基础)用六根链杆相联,如果六根链杆与任•轴线不同时相交,而且在任一轴线上的投影不同时为零,则组成几何不变的整体,且无多余约束。
(4)空间刚体用六根链杆与基础相连,其•般规律比较复杂。
•般情况下采用零载法来判断更为简便,有以下规律
规律如•刚体与基础用六根链杆相连。
在零载下用截而法列出六个平衡方程.其系数行列式为D。
如D=0.则此空间体系为几何不变,且无多余约束。
规律4b•刚体与基础用六根链杆相连。
如果在零载下求出六杆轴力均为零,则此空间体系为几何不变,且无多余约束。
2.空间餃接体系的计算自由度W
(1)计算自由度w
W=3j-b(a)
<2)W值对体系作出的定性结论
1W>0,体系是几何可变的:
2WVO,体系是有多余约束的;
3w=o,体系可能是几何不变且无多余约束,也可能是几何可变且有多余约束。
四、静定空间刚架
1.内力计算
(1)空间结构杆件轴线与荷载不在同•平面内,杆件截面•般有六个内力分量如图11-2(a)(b)所示。
(2)作内力图时的规定
1轴力Fn以受拉为正;
2扭矩Ml以双箭头矢量向外为正;
3弯矩图不注正负号,弯矩M]、“2都画在杆件受拉纤维•侧:
4剪力图也不注正负号,但需预先规定杆件轴线的正方向,并规定截而的正血•和反而。
(3)空间刚架的内力图
1杆BC的杆端内力,隔离体如图11・3(a)所示
工0.
2杆AB的杆端B内力,隔离体如图11・3(b)所示
工F,=0・=
HF严0・仏产0・
XMz=0,(M」刼=0工M、=0・(Af、)“0工M严0.(MJa二・Fp厶
3
杆AB的杆端A内力,隔离体如图11・3(c)
4
作内力图
图11・4
2.位移计算
(1)位移计算公式
fMMp
!
-Girds
、、「Mmp」亠、、r“如」x、j“II右d"纠飞厂出+可
五、静定空间桁架
1.空间桁架的几何构造
<1)空间桁架的组成
空间桁架由结点和链杆组成,每个结点在空间有三个自由度,而每个链杆或支杆相当于•个约束。
(2)空间桁架的分类
1简单桁架:
2联合桁架:
3复杂桁架。
2.结点法和结点单杆
(1)结点法
结点法是截取结点为隔离体,利用每个结点所受的空间汇交力系的三个平衡条件:
HF,=0.工耳=0,SE=0
(2)结点单杆
如果在空间桁架某个结点相交的各杆中,除某•杆外,其余各杆都共面,则称该杆为此结点的单杆,有下面两种常见情况
1结点只包含三个杆,且此三杆不共面,则每杆都是单杆:
2结点包含四个杆,其中三杆共面,则第四杆是单杆。
3.截面法与截面单杆
<1)截面法
截而法是用藏而从空间桁架中藏取隔离体(藏断六根以上杆件,所作用的力系为空间•般力系),利用空间…般力系的六个平衡条件来求各杆轴力的常用方法。
(2)截面单杆
如果某个藏而所藏各杆中,除某•杆外,其余各杆轴力与同•轴线都相交(包括在无穷远处相交)或在同•轴线上的投影都为零,则称该杆为藏而单杆。
4.
分解成平面桁架法
图11-5
图11-5(a)为-空间桁架,将作用在E点的荷载沿EH.EF、EA三个方向分解为尸和、尸力三个分力,分别计算每个分力产生的内力并叠加即得到所要解答。
(1)Fpi只使平面桁架ADHE受力,其余各杆轴力为零。
如图11-5(b):
(2)Fpi只使平面桁架ABEF受力,其余各杆轴力为零。
如图11-5(c):
(3)斤3只使杆AE受压,其余各杆轴力为零。
如图11-5(d)所示。
六、悬索结构
1.悬索结构的特点
(1)悬索结构是由•系列受拉的索作为主要承重构件,并悬挂在相应的支承上的结构。
(2悬索结构的形式
1单层悬索:
2或层悬索;
3鞍形索网;
4斜拉式屋盖:
5索梁体系等。
(3)单根悬索计算时的基本假设
1索是理想柔性的,不能受压,不能受弯,只能受拉:
2索在使用阶段时应力和应变符合胡克定律(线性关系)。
2.支座等高悬索在竖向集中载荷作用下的计算
图11・6图11・6(a)为•集中荷载作用下的悬索,图11・6(b)为同跨度的简支梁,可得:
口=為pvfl=n0
悬索任•截而D的弯矩为零,则有
M=Mn-Fuy=0y=耳
3.悬索在分布荷载作用下的计算
根据微分单元的静力平衡条件,有
YF.^O.讨血“少"
学+久・0(•)
<1X
纠=0.尚F閱心+g.山“裁”却+g,=0(b)
方程(a)、(b)就是单索的基本平衡微分方程。
如果悬索只承受竖向荷载的作用,即q%=0时,由方程(a)得
fH=a(常量)(c)
因此,式(b)可写成
几晋f卢。
⑷
七、静定结构的受力特性
1.静定结构与超静定结构的差别
(1)在几何构造方而,静定结构无多余约束,超静定结构有多余约束。
<2)在静力平衡方面,静定结构的内力,可以由平衡条件完全确定,得到的解答只有•种:
超静定结构的内力,由平衡条件不能完全确宦,而需要同时考虑变形协调条件后才能得到唯•的解答。
2.温度改变、支座位移和制造误差等因素在静定结构中不引起内力。
(1)图11-8(a)中,可以假想先把B端的-支杆去掉,梁就成为几何可变的,使梁绕A点转动,等B端移至B,后,再把支杆重新加上。
在这个过程中,梁内不会产生内力。
(2)图11-8(b)中,设三较拱的杆AC因施匸误差稍有缩短,拼装后结构形状略有改变(如虚线所示),但三较拱内不会产生内力。
(3)图11-8(c)中,设简支梁的上方和下方温度分别改变了干t,因为简支梁可以自由地产生弯曲变形(如虚线所示),所以梁内不会产生内力。
图11-8
3.静定结构的局部平衡特性
在荷载作用下,如果仅靠静定结构中的某•局部就可以与荷载维持平衡,则其余部分的内力必为零。
4.静定结构的荷载等效性
当静定结构的•个内部几何不变部分上的荷载作等效变换时,其余部分的内力不变。
这里,等效荷载是指荷载分布虽不同,但其合力彼此相等的荷戦。
5.静定结构的构造变换特性
当静定结构的-个内部几何不变部分作构造变换时(变换后,尽管结构形式变了,但仍应是•个静定结构),其余部分的内力不变。
八、各种结构形式的受力特点
1.结构形式的分类
(1)无推力结构,如梁、梁式桁架:
(2)有推力结构,如三较拱、三钱钢架、拱式桁架和某些组合结构。
2.杆件的分类
(1)梁杆,如桁架中的各杆、组合结构中的某些杆件:
(2)梁式杆,如多跨梁和钢架中的各杆、组合结构中的某些杆件。
3.各种结构形式的特点:
(1)在静定多跨梁和伸臂梁中,利用杆端的负弯矩可以减小跨中的正弯矩。
<2)在有推力结构中,利用水平推力的作用可以减少弯矩峰值。
(3)在桁架中,利用杆件的较接和合理布置及荷载的结点传递方式,可使桁架中的各杆处于无弯矩状态,在三较拱中,采用合理轴线可以使拱处于无弯矩状态。
九、简支梁的内力包络图和绝对最大弯矩
I.内力包络图
内力包络图是指在设计承受移动荷载的结构时,必须求出每•个截闻内力的最人值,连接各截面内力最大值的曲线。
2.绝对最人弯矩
弯矩包络图中最高的竖距,称为绝对最人弯矩,它代农在•定移动荷载作用下梁内可能出现的弯矩最人值。
十、位移影响线
1.根据影响线的定义,得出位移影响线的原始作法
(1)将移动荷载Fp=l置于任意位置x,得出梁的位移图
(2)按原始定义作影响线,以荷载位置x作横坐标,以位移影响系数6kp作纵坐标。
2.借助位移互等定理,导出位移影响线的比拟作法
11.2课后习题详解
11-1试用零载法检验图所示体系是否几何不变。
解.(a)荷载为零,即支反力为零,再逐个取出二元体和零杆,可知所有桁架杆件内力都为零,如下图祈示,所以体系是几何不变的。
图11・2
(b)荷载为零,即支反力为零。
去除二元体,可知桁架各杆都是零杆,如下图所示,所以体系几何不变。
图11・3
(c)按照零杆判断原则,中间竖杆为零杆,去掉后再逐个去掉二元体,故体系几何不变。
图11・4
(d)如图所示,假设其中.杆的内力为X,运用结点法可求出各杆内力。
计算可知,内力是丫衡的。
所以X可以不为0,所以体系是几何可变的。
1.37X
图11・5
11-2试分析图示空间体系的几何构造。
图11・6
解:
(a)可以把四面体GDEF看出•个刚片,通过DA、EA、EB>EC、FC.GH六链杆与基本体系相连,且EA、EB、EC三链杆支于•点,并六链杆不交与同•宜线上,则体系几何不变、且无多余约
4
图11-7
(b)计算自由度,6个结点、12根杆件、6根支杆,则有:
0二3x6-12-6=0
结构组成(注意体系是空间结构),B点被三杆固定在基础上,由杆BF和两支杆固定F点•再由杆BD.杆FD和支杆固定D点,这部分为无多余约束的几何不变体系。
刚体AEC由六根链杆与几何不变部分相连,由杆AB和DA固定的A点只能绕BD轴作圆周运动。
同理,E点只能绕BF轴作圆周运动,C点只能绕FD轴作圆周运动。
要使这三个运动瞬时成为可能,只有两种情况:
1三个圆的切线相互平行,即三个圆运动平动,刚体有同•方向运动的可能。
显然,这种情况不可能:
2三个圆圈的三条切线有转动中心,这时刚体存在•个转轴,使得这三点都保持原有切线方向运动。
显然,平itriACE为点A.点E和点C三点作圆周运动的切线所在的公共而。
过这三点作切线的垂线,若这三条垂线交于•点,则过这点做平iftiACE的垂线,该垂线为刚体的瞬时转动轴。
结构为瞬变体系,而三角形AEC的三边就是这三条垂线,显然不交于•点,于是结构不可能成为瞬变体系。
 升级会员
升级会员 