无人机自动驾驶仪.docx
《无人机自动驾驶仪.docx》由会员分享,可在线阅读,更多相关《无人机自动驾驶仪.docx(11页珍藏版)》请在冰豆网上搜索。
无人机自动驾驶仪
无人机自动驾驶仪
1.自动驾驶仪(autopilot):
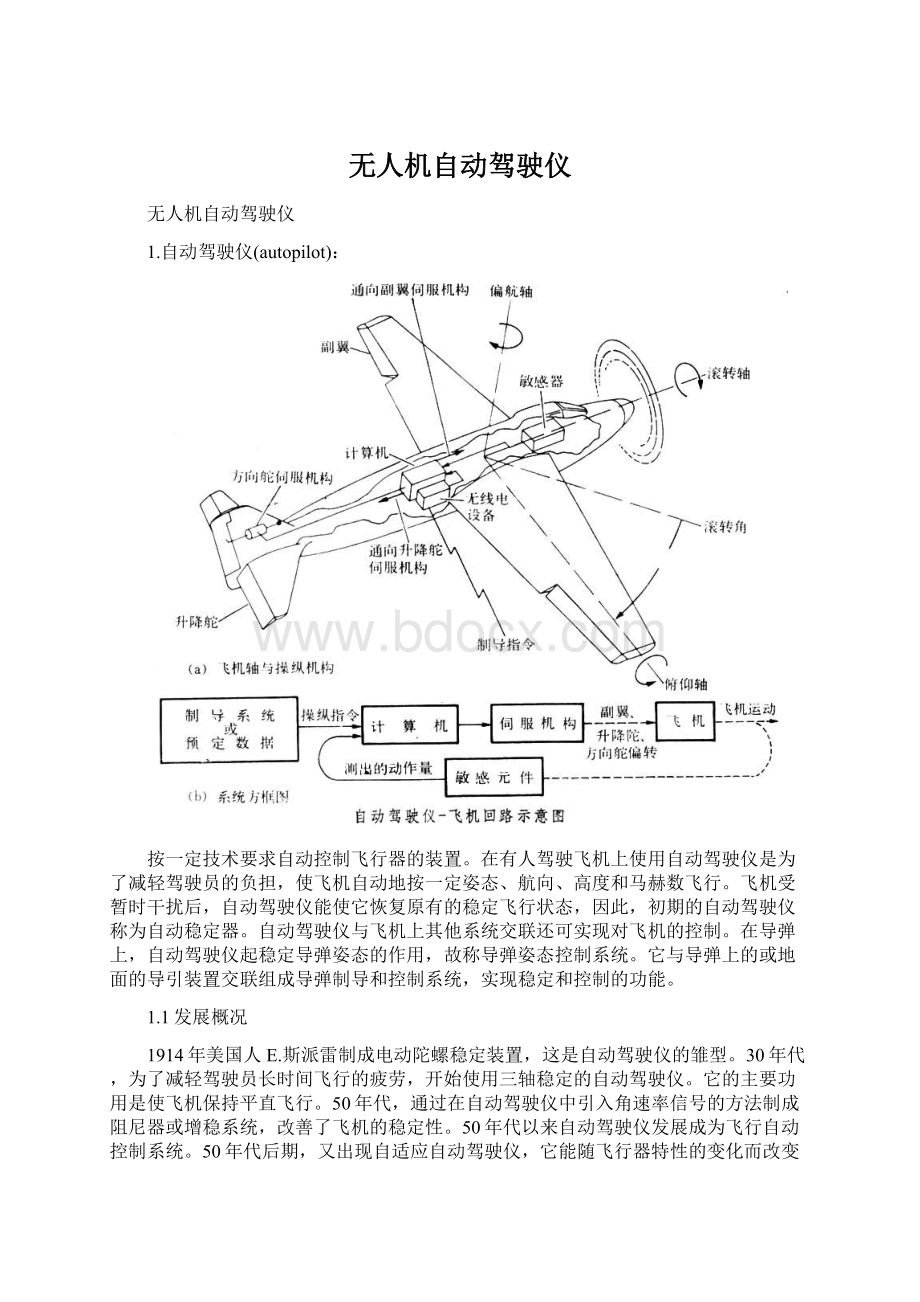
按一定技术要求自动控制飞行器的装置。
在有人驾驶飞机上使用自动驾驶仪是为了减轻驾驶员的负担,使飞机自动地按一定姿态、航向、高度和马赫数飞行。
飞机受暂时干扰后,自动驾驶仪能使它恢复原有的稳定飞行状态,因此,初期的自动驾驶仪称为自动稳定器。
自动驾驶仪与飞机上其他系统交联还可实现对飞机的控制。
在导弹上,自动驾驶仪起稳定导弹姿态的作用,故称导弹姿态控制系统。
它与导弹上的或地面的导引装置交联组成导弹制导和控制系统,实现稳定和控制的功能。
1.1发展概况
1914年美国人E.斯派雷制成电动陀螺稳定装置,这是自动驾驶仪的雏型。
30年代,为了减轻驾驶员长时间飞行的疲劳,开始使用三轴稳定的自动驾驶仪。
它的主要功用是使飞机保持平直飞行。
50年代,通过在自动驾驶仪中引入角速率信号的方法制成阻尼器或增稳系统,改善了飞机的稳定性。
50年代以来自动驾驶仪发展成为飞行自动控制系统。
50年代后期,又出现自适应自动驾驶仪,它能随飞行器特性的变化而改变自身的结构和参数。
60~70年代,数字式自动驾驶仪应运而生,它在“阿波罗”号载人飞船登月舱的登月过程中得到应用。
1.2原理和组成
自动驾驶仪是模仿驾驶员的动作驾驶飞机的。
它由敏感元件、计算机和伺服机构组成。
当某种干扰使飞机偏离原有姿态时,敏感元件(例如陀螺仪)检测出姿态的变化;计算机算出需要的修正舵偏量;伺服机构(或称舵机)将舵面操纵到所需位置。
自动驾驶仪与飞机组成反馈回路,保证飞机稳定飞行。
1.3分类和特点
自动驾驶仪可按能源形式、使用对象、调节规律等分类。
①按能源形式:
分为气压式、液压式、电气式或者是这几种形式的组合。
现代超音速飞机多安装电气(或电子)-液压式自动驾驶仪。
气压式伺服机构主要用于导弹。
②按使用对象:
分为飞机自动驾驶仪和导弹自动驾驶仪。
飞机自动驾驶仪多具有检测飞机姿态角的敏感元件,能稳定飞机的姿态角。
为了提高这种自动驾驶仪的稳定效果,可配合使用速率陀螺仪。
战术导弹只需要稳定角速度,其姿态角根据目标的运动而改变,因此,在自动驾驶仪中不设检测角位置的敏感元件。
巡航导弹、战略导弹和运载火箭需要稳定姿态角,在这些飞行器的自动驾驶仪中仍有检测姿态角的敏感元件。
③按调节规律:
自动驾驶仪的调节规律(即数学模型)表示伺服机构的输出量与被调参量之间的函数关系。
飞机自动驾驶仪依调节规律的不同分为比例式自动驾驶仪和积分式自动驾驶仪。
比例式自动驾驶仪是以伺服机构输出的位置偏移量(如舵偏角)与被调参量(如姿态角)的偏差成比例的原理工作的。
它的结构简单,应用很广,但在干扰作用下会产生静态误差。
积分式自动驾驶仪是以伺服机构输出的位置偏移量与被调参量偏差的积分成比例的原理工作的,它没有静态误差,但系统的稳定性差,结构复杂,应用受到一定限制。
导弹自动驾驶仪按被调参量的性质可分为位置式自动驾驶仪、定向式自动驾驶仪和加速度式自动驾驶仪。
位置式自动驾驶仪的被调参量是飞行器的角位置(即姿态角),伺服机构的输出量与姿态角的偏差成比例。
定向式自动驾驶仪的被调参量是飞行器的姿态角速度,伺服机构的输出量与姿态角速度的偏差成比例。
加速度式自动驾驶仪的被调参量是飞行器的法向加速度,伺服机构的输出量与法向加速度的偏差成比例。
现代自动驾驶仪的趋势是向数字化和智能化方向发展。
80年代以前,战术导弹由于工作时间短、工作环境条件恶劣(如很大的过载)等较少采用数字式自动驾驶仪。
微型计算机出现后,战术导弹开始采用数字式自动驾驶仪。
近代空战中,自动驾驶仪能以最佳方式操纵战斗机,例如以最短的时间飞到最有利的位置。
在导弹攻击目标时,自动驾驶仪与制导系统配合使导弹能识别敌友、分析敌情变化并作出最优决策。
这就要求自动驾驶仪具有智能的功能。
2.其它公司无人机自动驾驶系统:
2.1硬件组成
Ø内置传感器:
三轴角速率陀螺、三轴加速度计、三轴磁力计、双嘴空速传感器、气压高度计、5HzGPS接收机、温度传感器。
Ø输入/输出接口:
8路PWM输入、7路PWM输出、2路电源监视输入、2路转速传感器输入、5路ADC、10路二进制遥测数据包、多功能LED指示灯。
Ø数据交换接口:
RS-232和RS-485。
Ø扩展设备接口:
RS-485接口X4(ABIP协议),RS-232接口X2(NMEA协议)。
Ø选配外置传感器:
空速高度组合传感器、超声波高度计、PWM信号和离散信号扩展器、飞行数据记录器、油量传感器、GLONASS或北斗GPS接收机、用户定制设备等。
2.2技术指标
Ø传感器量程:
角速率150°/s,加速度10g,动压15~115Kpa,静压0~4Kpa
Ø空速量程:
300km/h(可扩展),精度±10km/h(10°С~60°С),分辨率2km/h
Ø气压高度:
-1000~11000m,精度±10m(0°С~80°С),分辨率0.3m,升降速率分辨率0.25m/s
Ø姿态量程:
滚转角±180°,精度0.1°;俯仰角±90°,精度0.1°;磁航向角±180°,精度0.3°
Ø温度量程:
-25°С~70°С,精度±3°С
Ø工作电压:
5.5v~6v,输入电压7v~16v,工作电流300±10%mA/6V
Ø波特率:
4800~115200
Ø裸板重量:
25g,裸板尺寸:
104X57X13mm
Ø带壳重量:
150g,外壳尺寸:
125X65X40mm
2.3技术指标
Ø73Hz并行数据处理和采集。
ØRS-485设备扩展总线。
Ø多功能稳压器,驾驶仪、舵机、外置传感器、扩展设备分开供电。
Ø可同时装载4个飞行计划:
每个飞行计划中,可装载32个控制图;可设置64个飞行状态(或航路点)、每个航路点可定义16项控制参数;可设置4个中断状态和10个跳变状态
Ø提供56个高速实时数据(姿态数据、测量数据、航行数据和惯导数据)以及224个控制节点数据。
Ø精确的多类型PID参数在线自动整定功能,系统调试简单方便快速。
Ø适用于各种固定翼、直升机、特种飞行器、陆地、水面和水下机器人控制,以及载体的独立数据采集分析系统。
2.4工作流程
2.5主要控件原理图
 升级会员
升级会员 