IAI电缸控制器MCEPC学习摘抄.docx
《IAI电缸控制器MCEPC学习摘抄.docx》由会员分享,可在线阅读,更多相关《IAI电缸控制器MCEPC学习摘抄.docx(43页珍藏版)》请在冰豆网上搜索。
IAI电缸控制器MCEPC学习摘抄
Caution:
MakesuretoturnthepowertothecontrollerOFFwheninsertingorremovingthe
connectorthatconnectsthePCsoftwareorteachingpendanttothecontroller.(Fortouchpanelteaching(CON-PTA,TB-01),insertionandremovaloftheactivelineisavailable.)InsertingorremovingtheconnectorwhilethepoweristurnedONcausesacontrollerfailure.在断开电脑或示教器与控制器的连接时,请将电断掉。
2.2OperationPatternSelected
2.2.1OutlineforOperationPatterns
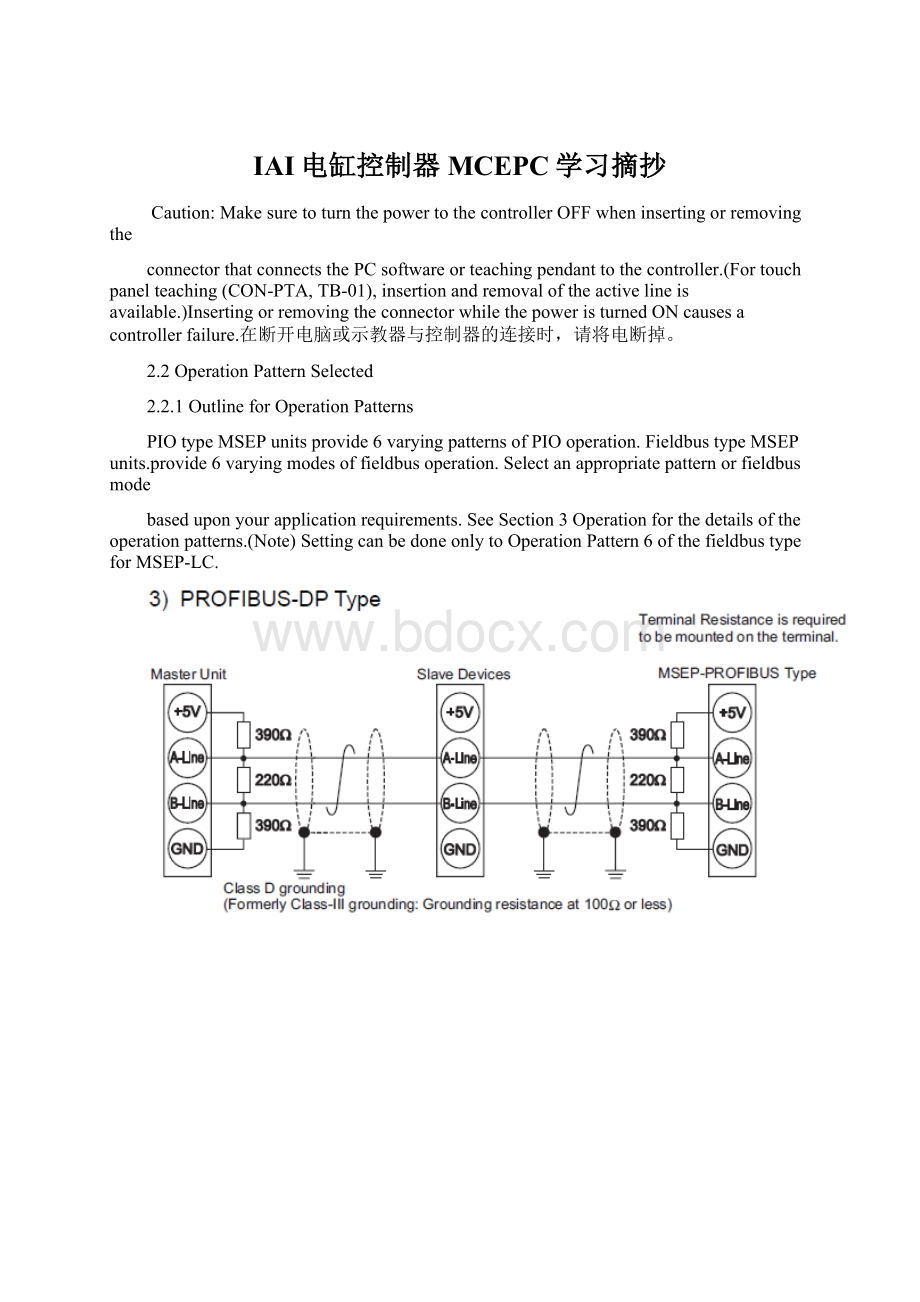
PIOtypeMSEPunitsprovide6varyingpatternsofPIOoperation.FieldbustypeMSEPunits.provide6varyingmodesoffieldbusoperation.Selectanappropriatepatternorfieldbusmode
baseduponyourapplicationrequirements.SeeSection3Operationforthedetailsoftheoperationpatterns.(Note)SettingcanbedoneonlytoOperationPattern6ofthefieldbustypeforMSEP-LC.
看到第37页
第83页:
OperationofMSEP-C
(Note)Referto3.2forMPEP-LCType
3.1.1BasicOperationMethods
Therearetwotypesofmethodsforoperation,onetocontrolwithPIOandtheothertocontrol
witfieldbus.Checkthemodelcodeindicatedonthemodelcodecardattachedonthefront
panelofthebodytoseewhichmethodshouldbeappliedforyourproduct.[RefertoSection
1.1.5]
OperationModeAvailableinFieldbusType。
6typesofoperationmodesareavailabletoselectfrom.Explainedbelowistheoutline.
[BasicOperationSteps]
[1]EstablishthedriverparameterswithusingateachingtoolsuchasPCsoftware.
1)IfusingSEPI/OModeintheoperationmodes[refertothenextpage],settheoperationpatternintheinitialsetting.[Referto3.1.2fordetails.]
2)Establishsuchsettingsasthezone(ParameterNo.21to24)andthesoftlimit(ParameterNo.15)consideringthesystemtobeused.[Refertochapter5I/OParameterfordetails.]
[2]InitialSetting[Referto3.1.2and3.9.]
EstablishthesettingssuchastheslaveaddressesforthefieldnetworkusingGatewayParameterSettingTool.Setoperationmodesforalltheconnectedaxes.设置从站地址。
1)EstablishthesettingsbyfollowingthestepsstatedinSection3.1.2.
2)Setthegatewayparametersconsideringthesystemtobeused.Establishsuchsettingsaswhethertousethecalendarfunction(clocksetting)andthespeedunitchangeduringDirectIndicationMode.
[3]SettingofPositionData[Referto3.3.](Note)SettingisnotnecessaryforDirectIndicationMode.针对Z-Bearing项目不需要这一步设置。
Settheinformationsuchasthetargetpositionandspeedtobeusedinthepositiondata.
[4]FieldNetworkSettings[Referto3.4.1and3.4.2.]AssignMSEPasthePLC(MasterUnit).将MSEP分配给PLC主站。
[RefertotheinstructionmanualsofthemasterunitandPLC.]
[5]LinktoNetwork
1)SettheoperationmodesettingswitchonthefrontpanelofMSEPtoAUTOside,andrebootthepower.(FieldnetworklinebecomesvalidbysettingtheswitchtoAUTO)将模式开关切换到自动,同时重新上电。
2)OncethelinkwiththePLC(MasterUnit)isestablished(Note1),turnONMONsignalinthegatewaycontrolsignals(Note2).WhileMONSignalisON,controlfromfieldnetworkisavailable.
Note1ConfirmthecommunicationisestablishedinnormalconditionbyreferringtoDisplayofFieldNetworkLEDsshowninthesectionofNameandFunctionofEachComponentinearlierpagesofthismanual.
Note2Referto3.4.3GatewayControlSignals.
[6]OperationControlwithEachOperationMode[Referto3.4.4to3.5.]
1)Sendtheinformationofthetargetposition,speed,acceleration/deceleration,etc.fromPLC(MasterUnit)toMSEP.
2)Theactuatorfollowsthereceivedinformationofthetargetposition,speed,acceleration/deceleration,etc.toperformapositioningatthespecificcoordinates.
3)Confirmthestatusofpositioningcomplete.
第一步,初始化设置。
主要设置控制器的控制类型。
InitialSetting
Forthiscontroller,itisnecessarytohavetheinitialsettingandGatewayoperationmodesetting
doneintheaxesonebyone.对轴逐个进行网关操作模式设置。
TheinitialsettingistobeperformedusingRCPCSoftware(Note)ortouchpanelteaching(TB-01,CON-PTA(Note)).AndtheoperationmodeistobesetusingGatewayParameterSettingTool(Ver.1.1.0.0orlater).(Note)用GatewayParameterSettingTool对网关参数进行设置。
SeetheinstructionmanualsoftheRCPCsoftwareandthetouchpanelteachingfortheapplicableversion.Shownbelowistheprocessforthesetup.Followtheinstructiontoconductthesettingproperly.
Makesurethepower,systemI/OconnectorwiresandoperationmodesettingswitchareinMANU
conditionwhenhavingthesettingdone.上述操作在手动模式下进行。
连接MSEP和电脑时用什么电缆?
大概在第90页左右开始对设置进行说明。
第二步:
设置每个轴的操作模式(控制类型)
Clickonablankcelland“*”showsup.“*”markmeansthatanoperationmodeisselected
foreachaxis.Selectanoperationmode[refertotopinChapter3]for2axesinaunit.Ifclickingonacell,“*”showsupfor2axestogether.Ifclickingacellshowing“*”,themarkturnsto“(*)”.“(*)”
meansitisareservedaxis,whichistobesetwhennotusingeventhoughtheactuatorisconnected.
Ifclickingonacellwith“(*)”markforthereservedaxesshownonthetwoaxes,thecellturnsbacktoblank.(Note)Evenifthetotalnumberoftheusedaxesisanoddnumber,makethelastaxisin
reservationtogetanevennumber.
第107页:
3.3SettingofPositionData
2)Position[mm]·················Itisthecoordinatevalueforpositioning.Inputthepositionfromthe
homeposition.
3)Speed[mm/s]·················Setthespeedintheoperation.Donotattempttoinputavaluemorethanthemaximumspeed[refertothecautionnotebelow]orminimumspeed(Note1).(Note1)Theminimumspeeddiffersdependingonthetypeoftheactuator.RefertothevaluesstatedintheChapter7appendixorthefollowingforthecalculation.Minimumspeed[mm/s]=Leadlength[mm]/No.ofEncoderPluses/0.001[s]
4)PressingForce[%]·········Setavalueotherthan0hereandthepressingoperationisavailable.Setapressingtorque(limitcurrentvalue)in%.Thesettingrangediffersdependingontheactuator.Refertotheinstructionmanualofeachactuatororthesectionforpressingforceandcurrentlimitintheappendixforthedetails.Ifthevalueissetto0,thenormalpositioningoperationisperformed.
ThespeedforthepressingoperationissetinParameterNo.7.Ifthesettingof3)islowerthanthepressingspeed,thepressingprocesswillbeconductedwiththespeedof3).
5)PressingWidth[mm]······Setthewidthforthepressingoperation.Theamountofthepressingwidthinfrontofthemovementtargetposition(forwardendandbackwardend)isthepointtostart
pressingoperation.
8)Energy-SavingSetting···Setthisto1(effective)andtheservoisturnedOFFautomaticallyin
acertaintimeafterthepositioningiscompletedforpowersaving.ThetimesettingistobeconductedinParameterNo.10AutomaticServo-OFFDelayTime,andthetimesettingcanbeselectedfrom1to9999[sec.].
Caution:
•NoretainingtorqueisprovidedinautomaticservoOFF.Paysufficientattentiontothesettingbecausetheactuatormaybemovedbyexternalforceappliedtoit.
•DonotusetheautomaticservoOFFinpressing.Ifused,thepressingforceislost.
•AutomaticServoOFFwouldnotfunctionintheoperationwithteachingmodeofPCsoftware.
第113页对报文结构做了简单的说明
3)PROFIBUS-DP,EtherNet/IP,EtherCAT
3.4.2ExampleforeachFieldbusAddressMap
[CombinationExample4]WhennumberofSimpleDirectModeaxesis0andnumberof
DirectIndicationMode8(nisthetopnodeaddressforeachPLCinputandoutputbetween
MSEPandPLC)
3.4.3GatewayControlSignals(incommonforalloperationmodesforMSEP-C)
WhenoperatingthesystemwithFieldbus,theaxesarecontrolledviaGatewayofMSEP.The
top2wordsofinputandoutputineachoperationmodearethesignalsGatewaycontroland
statusmonitoring.
3.4.5ControlSignalsforDirectIndicationMode
Thisisanoperationmodetoindicatedirectlywithvaluesforthetargetposition,positioning
width,speed,acceleration/decelerationandpressingcurrent.Setavaluetoeachinputandoutputdataregister.Settotheparameterswhenusingthezonesignals.ThemainfunctionsofROBOCylindercapabletocontrolinthismodeareasdescribedinthefollowingtable.
(2)InputandOutputSignalAssignmentforeachAxisTheI/Osignalsforeachaxisconsistsof8-wordforeachI/Obitregister.位寄存器
●ThecontrolsignalsandstatussignalsareON/OFFsignalsinunitsofbit.
●Forthetargetpositionandcurrentposition,2-word(32-bit)binarydataisavailableandvalues
from-999999to+999999(unit:
0.01mm)canbeused.Negativenumbersaretobedealtwith
two’scomplement.
Caution:
Setthepositiondataintherangeofthesoftstroke(0toeffectivestrokelength)oftheactuator.
Setthepositioningwidth.Thepositioningwidthisexpressedusing2-word(32bits)binarydata.Thefiguresfrom0to+999999(Unit:
0.01mm)canbesetinPLC.
●Thecommandspeedisexpressedusing1-word(16bits)binarydata.Thefiguresfrom1to
+65535(Unit:
1.0mm/secor0.1mm/sec)canbesetinPLC.Achangeoftheunitistobe
conductedonGatewayParameterSettingTool.
●TheAcceleration/Decelerationisexpressedusing1-word(16bits)binarydata.Thefigures
from1to300(Unit:
0.01G)canbesetinPLC.
●Thepressingcurrentlimitvalueisexpressedusing1-word(16bits)binarydata.Thefigures
from0to100%(0toFFH)canbesetinPLC.
Caution:
Havethesettingwithvaluesavailableintherangeofforspeed,acceleration/decelerationandpressingcurrentoftheactuator.(Refertothecatalogorinstructionmanualoftheactuator.)
Otherwise,itmaycauseanabnormalconditionoftheservooramalfunctionoftheactuatorsuchasthealarmcodes0A3“PositionCommandInformationDataError”,0C0“ExcessActualSpe
 升级会员
升级会员 