风力发电偏航控制系统.docx
《风力发电偏航控制系统.docx》由会员分享,可在线阅读,更多相关《风力发电偏航控制系统.docx(9页珍藏版)》请在冰豆网上搜索。
风力发电偏航控制系统
风力发电偏航控制系统
风力发电偏航控制系统的研究
0引言
风能是一种清洁能源,在人类实现可持续发展中有着重要作用,由于它的作用大,故此吸引的许多人的开发,风力发电更是受到广大的青睐。
其可靠优秀可靠优秀也被更多人认识。
本文主要是对风力偏航控制系统的组成和原理做一个简单的了解,偏航系统主要是由偏航控制机构和偏航驱动机构两大部分组成,控制机构包括风向传感器,偏航控制器,解缆传感器组成,而驱动机构是由偏航轴承,偏航驱动装置,偏航制动器组成。
本课题也是在了解了风力发电的一些基本原理的前提下面,进一步对偏航做一个更好的认识,了解简单的控制流程。
同样就风力在全世界的快速发展,因此带动了一大批产业的崛起,它对世界经济的上升带来了不可忽视的重大作用。
1风力发电概况
1.1国外风力发电的发电
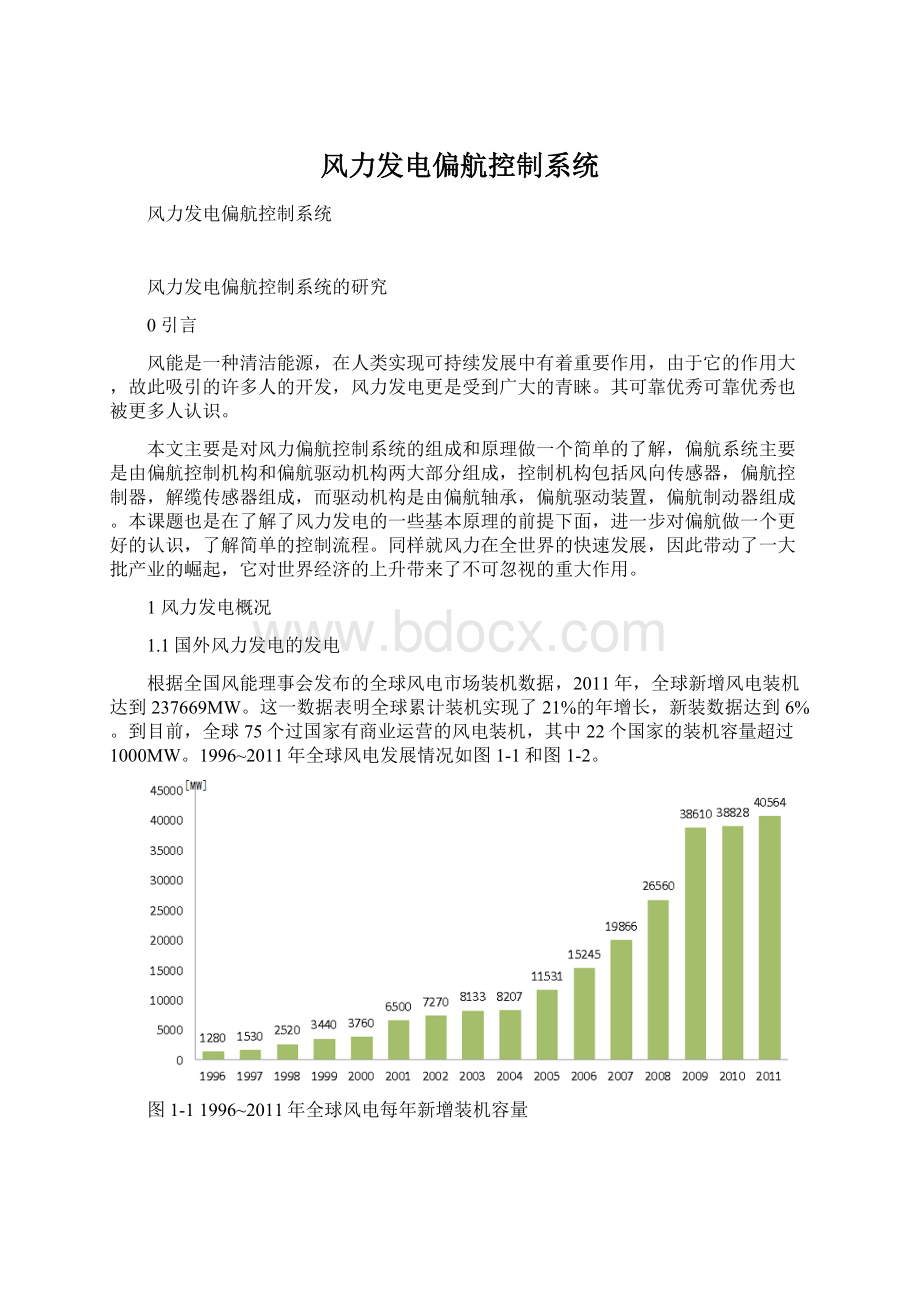
根据全国风能理事会发布的全球风电市场装机数据,2011年,全球新增风电装机达到237669MW。
这一数据表明全球累计装机实现了21%的年增长,新装数据达到6%。
到目前,全球75个过国家有商业运营的风电装机,其中22个国家的装机容量超过1000MW。
1996~2011年全球风电发展情况如图1-1和图1-2。
图1-11996~2011年全球风电每年新增装机容量
图1-21996~2011年全球风电每年累计装机容量
1.2国内风力发电的发展
风电行业在2011年仍然保持了较快的发展,根据不完全统计,截止到2011年12月末,中国风电累计装机容量达6580.21万千瓦(包括已经并网发电和等待并网发电),分布在31个省、直辖市、自治区和特别行政区。
其中,广州和四川在2011年填补了无风电的空白。
累计风电装机超过200万千瓦的省级地区有10个,其中内蒙古风电装机容量以1853.63万千瓦位居第一,河北与甘肃分别位居第二和第三。
累计风电装机容量前10位省级地区的合计装机容量达到5671.45万千瓦,占全国累计风电装机容量的86.19%如图1-3。
图1-32011年底中国升级地区累计风电装机容量前十位
2偏航系统
2.1偏航系统概述
偏航系统是水平轴式风力发电机组不可缺少的组成之一。
它的主要作用有两个:
一是与风力发电机组的控制系统相互配合,使风力发电机组的风轮始终处于迎风状态,充分利用风能,提高风力发电机组的发电效率;二是提供必要的锁紧力矩,以保障风力发电机组的安全运行。
2.2偏航系统的结构组成
风力机的偏航系统由偏航控制机构和偏航驱动机构两大部分组成,其中偏航控制机构包括风向风速传感器,偏航控制器,解缆传感器。
机械驱动机构包括:
,偏航轴承,偏航驱动装置,偏航制动器,偏航计数器,偏航控制机构是风力机特有的伺服系统,机械驱动机构则是偏航系统的执行机构。
以下图2-1就是偏航控制系统的结构框图。
图2-1偏航控制系统的结构框图
2.3偏航控制机构
2.3.1风向风速传感器
风向风速传感器又称为风向风速计,它是用来测量风向和风速用的。
而风向传感器有很多种类,但是一般都是采用螺旋式,而风速重要用于变桨柜来配合我们的偏航控制。
风力机上安装的风向、风速计与气象和气候分析所用的测风设备不同有一些区别,一是因为只用于控制偏航系统的工作,并不用于风向、风速的精确计量,因此通常精度较低,而是风向仪安装在机舱顶部随机舱一起转动,因此只能测量出机舱与来风方向的大致角度,以判断从哪个方向偏航对风,并不能检测出风的实际方向。
因此风力机上所使用的风向仪和测风装置上的风向仪在结构和原理上有很大区别,以下是图2-2是风向传感器。
图2-2风向传感器
2.3.2偏航控制器
偏航控制器负责接受和处理信号,根据控制要求,发送控制命令。
通常采用单片机等微处理器作为偏航控制器,随着数字处理信号技术的发展,采用嵌入式微处理器或者DSP等作为控制器成为研究应用的趋势。
2.3.3解缆传感器
由于风力机总是选择最短距离最短时间内偏航对风,有时由于风向的变化规律,风力机有可能长时间往一个方向偏航对风,这样就会造成电缆的缠绕,如果缠绕圈过多,超过了规定的值,将造成电缆的损坏。
为了防止这种现象的发生,通常安装有解缆传感器。
解缆传感器安装在机舱底部,通过一个尼龙齿轮与偏航大齿圈啮合,这样在偏航过程中,尼龙齿轮也一起转动。
通过蜗轮、蜗杆和齿轮传动多级减速,驱动一组凸轮,每个凸轮推动一个微动开关工作,发出不同的信号指令。
微处理器通过各个微动开关的信号来判断是否需要解缆,向哪个方向解缆以及何时停止解缆等。
2.4偏航机械驱动机构
风力发电机组的偏航系统一般有外齿形式和内齿形式两种。
偏航驱动装置可以采用电动机驱动或液压马达驱动,制动器可以是常闭式或常开式。
常开式制动器一般是指有液压力或电磁力拖动时,制动器处于锁紧状态的制动器;常闭式制动器一般是指有液压力或电磁力拖动时,制动器处于松开状态的制动器。
采用常开式制动器时,偏航系统必须具有偏航定位锁紧装置或防逆传动装置。
2.4.1偏航轴承
常用的偏航轴承有滑动轴承和回转支承两种类型。
滑动轴承常用工程塑料做轴瓦,这种材料即使在缺少润滑的情况下也能正常工作。
偏航轴承的轴承内外圈分别与机组的机舱和塔体用螺栓连接。
轮齿可采用内齿或外齿形式。
外齿形式是轮齿位于偏航轴承的外圈上,加工相对来说比较简单;内齿形式是轮齿位于偏航轴承的内圈上,啮合受力效果较好,结构紧凑。
具体采用内齿形式或外齿形式应根据机组的具体结构和总体布置进行选择。
偏航齿圈的结构简图,如图2-3所示。
a)外齿驱动形式的偏航b)内齿驱动形式的偏航系统
图2-3偏航齿圈的结构简图
2.4.2偏航驱动装置
驱动装置一般由驱动电动机或驱动马达、减速器、传动齿轮、轮齿间隙调整机构等组成。
驱动装置的减速器一般可采用行星减速器或蜗轮蜗杆与行星减速器串联;传动齿轮一般采用渐开线圆柱齿轮。
驱动装置也包括偏航电机和偏航减速齿轮机构,偏航驱动装置通常采用开式齿轮传动。
大齿轮固定在塔架顶部静止不动,多采用内齿轮结构,小齿轮由安装在机舱上的驱动器驱动。
2.4.3偏航制动器
为了保证风力机停止偏航时不会因叶片受风载荷而被动偏离风向的情况,风力机上多装有偏航制动器。
偏航制动器是偏航系统中的重要部件,制动器应在额定负载下,制动力矩稳定,其值应不小于设计值。
偏航制动器一般采用液压。
制动盘通常位于塔架或塔架与机舱的适配器上,一般为环状,制动盘的材质应具有足够的强度和韧性。
2.4.4偏航计数器
偏航计数器是记录偏航系统旋转圈数的装置,当偏航系统旋转的圈数达到设计所规定的初级解缆和终极解缆圈数时,计数器则给控制系统发信号使机组自动进行解缆。
计数器一般是一个带控制开关的蜗轮蜗杆装置或是与其相类似的程序。
3.偏航系统的控制过程与设计要求
3.1偏航系统控制过程
在控制过程当中,我们根据风力发电机在偏航中的作用,就对系统进行分析,偏航系统的控制过程可以分为:
在可用风速范围内,自动偏航;超出可用风速范围时90度侧风;为防止电缆缠绕,自动解缆;在风机维修或故障时,人工偏航。
3.1.1自动偏航
自动偏航是指风力发电机,根据风向与机舱的夹角,自动调整机舱位置,确保风轮能够准确对风,以实现风能的最大获取。
为了防止过频的执行偏航动作,保证风力发电机的寿命,偏航系统需要有一个合适的偏航误差容许角。
当超出误差范围时,系统控制器发出自动偏航指令,使机舱准确对风。
对于运行中的风机,平均风向不可能突变,所以风机绝大部分时间都在进行锐角偏航。
但对于由停机状态开始运行的风机,也有可能进行钝角偏航,图3-1为自动偏航示意图。
图3-1自动偏航示意图
3.1.290度侧风
90度侧风是指在出现特大强风等极端环境时,为了保证风力发电机的安全,停机时需要将风轮侧对风向的操作。
90度侧风时应当使机舱走最短路径,尽量减小偏航运转时间降低风机损坏的危险性。
90度侧风时需屏蔽自动偏航指令。
在机舱调到侧风位置时,应当启动偏航刹车器。
当风向变化时,风轮同样也需要追踪风向的变化,使风轮始终保持侧风位置,确保风力发电机的安全。
3.1.3人工偏航
人工偏航是指当风力发电机自动偏航失效,在需要维修和人工解缆时,通过人工发送命令来控制风力发电机调向的操作。
当偏航控制器接到开启人工偏航的命令后,控制器首先检测此时偏航系统是否正在进行偏航操作。
如果系统无偏航操作,则屏蔽自动偏航操作,如果系统正在进行偏航,则清除自动偏航控制标记信号;然后检测自动偏航的方向信号,如果与人工偏航方向一致,控制偏航电机继续运转,执行人工偏航;若不一致,先停止偏航电机工作,再向相反方向进行运转并记录转向,当系统检测到人工偏航停止信号出现时,停止偏航电机工作,启动偏航刹车器,清除人工偏航标志。
3.1.4自动解缆
由于自然风的随机性,风机的偏航方向也是不确定的。
如风力发电机持续向同一方向转动,就会造成电缆缠绕,甚至绞断。
因此解缆装置成为了风力发电机偏航系统的一个重要部分。
当风机达到其自身规定的解缆角度时,系统进行自动解缆,此时风力发电机立即刹车停机,然后启动偏航电机驱动机舱反方向旋转,使机舱返回电缆无缠绕位置。
3.2偏航系统设计要求
在我们设计偏航系统的时候,我们要考虑很多的条件来确保系统能够更加的可靠运行,最主要有环境条件的注意,如温度、湿度、阳光辐射、雨、冰雹、雪和冰、近海环境需要考虑附加特殊条件。
其二就是电缆,为保证机组悬垂部分电缆不至于产生过度的纽绞而使电缆断裂失效,风力发电机智能偏航控制系统研究必须使电缆有足够的悬垂量,在设计上要采用冗余设计。
电缆悬垂量的多少是根据电缆所允许的扭转角度确定的。
其三就是解缆和纽缆保护是风力发电机组的偏航系统所必须具有的主要功能。
其四就是偏航液压系统,并网型风力发电机组的偏航系统一般都设有液压装置,其作用是拖动偏航制动器松开或锁紧。
一般液压管路应采用无缝钢管制成,柔性管路连接部分应采用合适的高压软管,最后就是要对一些系统环境该进行密封的要密封处理,有一些设备零件需要做好防腐。
4偏航控制系统的功能及原理
4.1偏航控制系统的功能
偏航系统是风力发电机组特有的伺服系统,是风力发电机组电控系统必不可少的重要组成部分。
它的功能有两个:
一是要控制风轮跟踪变化稳定的风向;二是当风力发电机组由于偏航作用,机舱内引出的电缆发生缠绕时,自动解除缠绕。
风力机偏航的原理是通过风传感器检测风向、风速,并将检测到的风向信号送到微处理器,微处理器计算出风向信号与机舱位置的夹角,从而确定是否需要调整机舱方向以及朝哪个方向调整能尽快对准风向。
当需要调整方向时,微处理器发出一定的信号给偏航驱动机构,以调整机舱的方向,达到对准风向的目的。
偏航控制系统主要具备以下几个功能,一是风向标控制的自动偏航;二是人工偏航,按其优先级别由高到低依次为:
顶部机舱控制偏航、面板控制偏航、远程控制偏航;三是风向标控制的90°侧风;四是自动解缆。
4.2偏航控制原理
根据空气动力学中的贝兹理论,风力机能够从风中捕获并输出的功率P的表达式为:
(4-1)
式(3.1)中:
P为风轮吸收的功率;p为空气密度;D为风轮扫掠的面积;CP为风力
机的功率系数;v为风速。
偏航角θe:
(4-2)
其中:
θW-风向角度;
θT-风力机叶轮角度。
风向标作为感应元件将风向变化信号转换为电信号传递到偏航电机控制回路的处理器中,处理器经过比较后给偏航电机发出顺时针或逆时针的偏航指令。
在偏航过程中,风力机总是按最短路径将机舱转过相应角度,才能够提高发电效率,这样就需要解决电机的起动和转向问题。
为了确定电机的转向使风力机转过最小路径,即偏航时间最短,需要弄清偏航角θe与风向角度和风力机叶轮角度(也就是机舱角度)之间的相对关系。
就水平轴风力机而言,风向和风力机叶轮迎风面法线方向的夹角有以下两种情况(以下角度都是相对的):
当风向与风力机叶轮迎风面法线方向角度差小于180o时,偏航角为:
 升级会员
升级会员 