雅克比矩阵Jacobi.docx
《雅克比矩阵Jacobi.docx》由会员分享,可在线阅读,更多相关《雅克比矩阵Jacobi.docx(22页珍藏版)》请在冰豆网上搜索。
雅克比矩阵Jacobi
雅可比矩阵(Jacobi方法)
Jacobi方法
Jacobi方法是求对称矩阵的全部特征值以及相应的特征向量的一种方法,它是基于以下两个结论
1)任何实对称矩阵A可以通过正交相似变换成对角型,即存在正交矩阵Q,使得
QTAQ=diag(λ1,λ2,…,λn)(3.1)
其中λi(i=1,2,…,n)是A的特征值,Q中各列为相应的特征向量。
2)在正交相似变换下,矩阵元素的平方和不变。
即设A=(aij)n×n,Q交矩阵,记B=QTAQ=(bij)n×n,则
Jacobi方法的基本思想是通过一次正交变换,将A中的一对非零的非对角化成零并且使得非对角元素的平方和减小。
反复进行上述过程,使变换后的矩阵的非对角元素的平方和趋于零,从而使该矩阵近似为对角矩阵,得到全部特征值和特征向量。
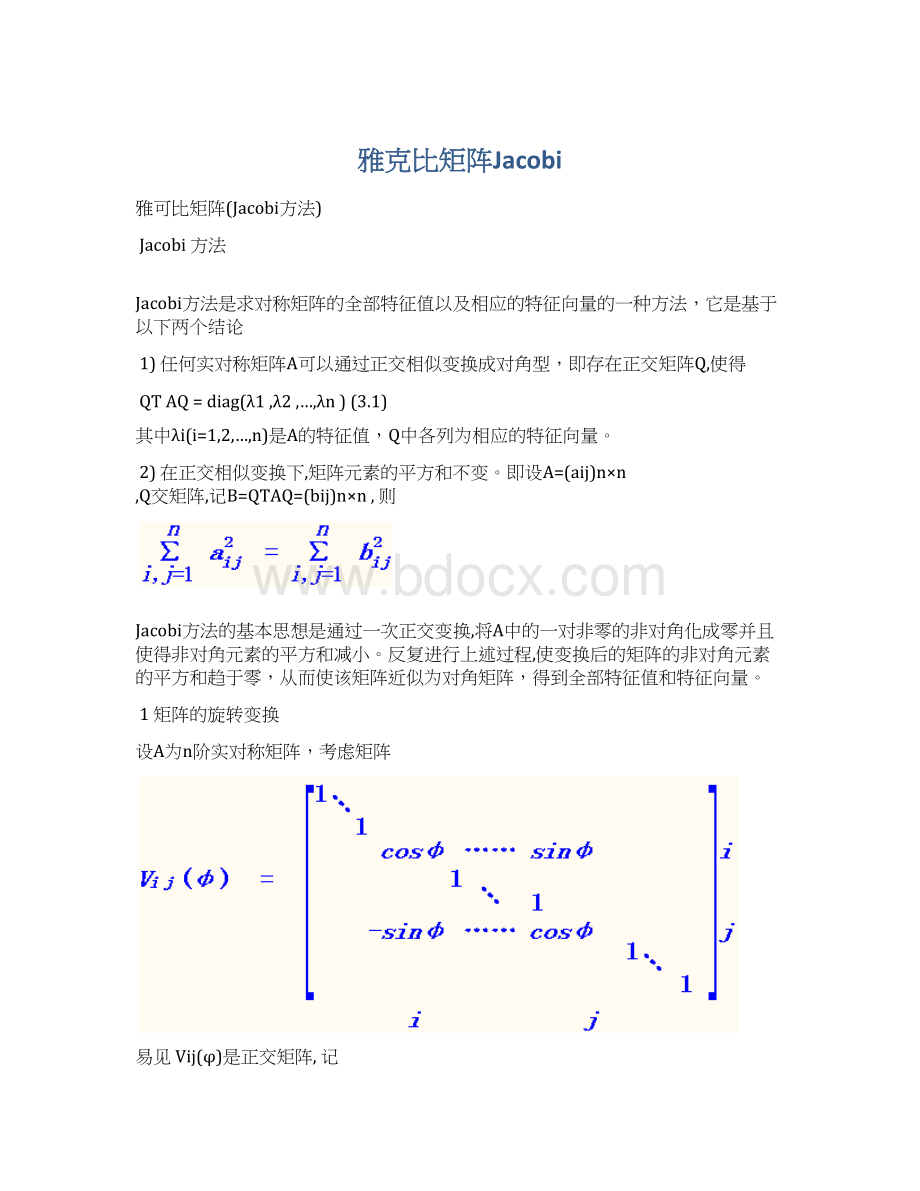
1矩阵的旋转变换
设A为n阶实对称矩阵,考虑矩阵
易见Vij(φ)是正交矩阵,记
注意到B=VijA的第i,j行元素以及
的第i,j列元素为
可得
如果aij≠0,取φ使得
则有
对A
(1)重复上述的过程,可得A
(2),这样继续下去,得到一个矩阵序列{A(k)}。
可以证明,虽然这种变换不一定能使矩阵中非对角元素零元素的个数单调增加,但可以保证非对角元素的平方和递减,我们以A与A
(1)为例进行讨论。
设
由式(3.4)
可得
这表明,在上述旋转变换下,非对角元素的平方和严格单调递减,因而由(3.2)可知,对角元素的平方和单调增加。
2.Jacobi方法
通过一系列旋转变换将A变成A(k+1),求得A的全部特征值与特征向量的方法称为Jacobi方法。
计算过程如下
1)令k=0,A(k)=A
2)求整数i,j,使得
3)计算旋转矩阵
4)计算A(k+1)
5)计算
6)若E(A(k+1))<ε,则
为特征值,
QT=(V(0)V
(1)…V(k+1))T
的各列为相应的特征
向量;否则,k+1=>k
返回2,重复上述过程。
例5用Jacobi方
法求矩阵
的特征值和特征向量。
一般地,Jacobi法不能在有限步内将A化成对角阵,但有下面的定理。
定理3设A为n阶使对称矩阵,对A用Jacobi法得到序列{A(k)},其中A(0)=A,则
证明由Jacobi法计算过程
故有
(3.5)
另一方面,有计算A的公式可以得到
于是有
代入式(3.5)得
因为
所以
雅可比矩阵
以m个n元函数ui=ui(x1,x2,…,xn)(i=1,2,…,m)的偏导数(j=1,2,…,n)为元素的矩阵
如果把原来的函数组看作由点x=(x1,x2,…,xn)到点u=(u1,u2,…,um)的一个变换T,则在偏导数都连续的前提之下,u随x的变化由相应的微分方程组
来描述。
这是一个关于微分的线性方程组,其系数矩阵便是雅可比矩阵(J),因而可写成矩阵形式
这隐含着(J)具有微分系数的某些性质,类似于一元函数的导数。
而在m=n=1的情形,它又恰好是一个一元函数的导数;所以它也是一个一元函数的导数到m个n元函数的一种推广。
因此,(J)作为微分系数或导数的推广,有时也被当作变换T的“导数”看待并记为T┡(x)=(J)。
变换T的进一步的数量描述需要雅可比行列式。
定义
任给一个n维向量X,其范数‖X‖是一个满足下列三个条件的实数:
(1)对于任意向量X,‖X‖≥0,且‖X‖=0óX=0;
(2)对于任意实数λ及任意向量X,‖λX‖=|λ|‖X‖;
(3)对于任意向量X和Y,‖X+Y‖≤‖X‖+‖Y‖;
对于这样的,叫雅克比矩阵定义。
雅克比矩阵证明
关于这个的一般性证明稍微复杂点,现在就给你证明为什么二维的dx(u,v)dy(u,v)=Jdudv成立
证明:
对于曲面x=x(u,v),y=y(u,v),取它的微元,即小曲边四边形ABCD,其中
A(u,v),B(u+△u,v),C(u+△u,v+△v),D(u,v+△v),那么这个曲边四边形ABCD可以近似看成是微小向量B(u+△u,v)-A(u,v)和D(u,v+△v)-A(u,v)张成的。
利用中值定理可知:
(u+△u,v)-(u,v)=Mdu
(u,v+△v)-(u,v)=Ndv
这里的M,N是偏导数的形式,不好打出,你可以自己算出来,很简单的。
当变化量很小时,我们把(u+△u,v)-(u,v)近似看成dx(u,v),(u,v+△v)-(u,v)看成dy(u,v),所以,
dx(u,v)dy(u,v)=M*Ndudv
而其中的M*N刚好就是二维Jacobi行列式的展开形式。
由此问题得证。
雅可比矩阵
在向量微积分中,雅可比矩阵是一阶偏导数以一定方式排列成的矩阵,其行列式成为雅可比行列式。
还有,在代数几何中,代数曲线的雅可比量表示雅可比簇:
伴随该曲线的一个群簇,曲线可以嵌入其中。
它们全部都以数学家雅可比命名;英文雅可比量"Jacobian"可以发音为[jaˈkobiən]或者[ʤəˈkobiən]。
雅可比矩阵的重要性在于它体现了一个可微方程与给出点的最优线性逼近。
因此,雅可比矩阵类似于多元函数的导数。
雅可比矩阵定义:
雅可比矩阵定义为向量对向量的微分矩阵,定义式如下:
见所附jpg图片。
例:
MATLAB中jacobian是用来计算Jacobi矩阵的函数。
symsrlf
x=r*cos(l)*cos(f);
y=r*cos(l)*sin(f);
z=r*sin(l);
J=jacobian([x;y;z],[rlf])
结果:
J= [cos(l)*cos(f),-r*sin(l)*cos(f),-r*cos(l)*sin(f)] [cos(l)*sin(f),-r*sin(l)*sin(f),r*cos(l)*cos(f)] [sin(l),r*cos(l),0]
Hessian矩阵就是一个多元实函数的二阶导数,设f=f(x1,x2..xn)二阶导数(d^2f/d(xi)d(xj))构成矩阵,在优化分析中常用到。
Jacobi矩阵就是一个多元矢量函数的一阶导数,如f=(f1(x1,x2..xn),...,fm(x1,x2..xn)),相应矩阵元素为d(fi)/d(xj)。
在稳定点附近的稳定性分析常用到它。
本质上说,以上两者是相关的Jacobi可以看作是一个多元实函数的梯度(一阶导数)的导数。
在向量微积分中,雅可比矩阵是一阶偏导数以一定方式排列成的矩阵,其行列式称为雅可比行列式。
还有,在代数几何中,代数曲线的雅可比量表示雅可比簇:
伴随该曲线的一个代数群,曲线可以嵌入其中。
它们全部都以数学家卡尔·雅可比命名;英文雅可比量"Jacobian"可以发音为[jaˈkobiən]或者[ʤəˈkobiən]。
雅可比矩阵
雅可比矩阵的重要性在于它体现了一个可微方程与给出点的最优线性逼近。
因此,雅可比矩阵类似于多元函数的导数。
假设F:
Rn→Rm是一个从欧式n维空间转换到欧式m维空间的函数。
这个函数由m个实函数组成:
y1(x1,...,xn),...,ym(x1,...,xn).这些函数的偏导数(如果存在)可以组成一个m行n列的矩阵,这就是所谓的雅可比矩阵:
此矩阵表示为:
,或者
这个矩阵的第i行是由梯度函数的转置yi(i=1,...,m)表示的
如果p是Rn中的一点,F在p点可微分,那么在这一点的导数由JF(p)给出(这是求该点导数最简便的方法)。
在此情况下,由F(p)描述的线性算子即接近点p的F的最优线性逼近,x逼近与p
例子
由球坐标系到直角坐标系的转化由F函数给出:
R×[0,π]×[0,2π]→R3
此坐标变换的雅可比矩阵是
R4的f函数:
其雅可比矩阵为:
此例子说明雅可比矩阵不一定为方矩阵。
在动力系统中
考虑形为x'=F(x)的动力系统,F:
Rn→Rn。
如果F(x0)=0,那么x0是一个驻点。
系统接近驻点时的表现通常可以从JF(x0)的特征值来决定。
雅可比行列式
如果m=n,那么F是从n维空间到n维空间的函数,且它的雅可比矩阵是一个方块矩阵。
于是我们可以取它的行列式,称为雅可比行列式。
在某个给定点的雅可比行列式提供了F在接近该点时的表现的重要信息。
例如,如果连续可微函数F在p点的雅可比行列式不是零,那么它在该点附近具有反函数。
这称为反函数定理。
更进一步,如果p点的雅可比行列式是正数,则F在p点的取向不变;如果是负数,则F的取向相反。
而从雅可比行列式的绝对值,就可以知道函数F在p点的缩放因子;这就是为什么它出现在换元积分法中。
例子
设有函数F:
R3→R3,其分量为:
则它的雅可比行列式为:
从中我们可以看到,当x1和x2同号时,F的取向相反;该函数处处具有反函数,除了在x1=0和x2=0时以外。
参看
海森矩阵
Jacobi阵和Hessian阵可谓是用途广泛。
不仅是在优化问题中常用,在各种多元问题中一般都常遇到。
比如在求解非线性方程组时,两者会经常被使用。
关于它们的定义和用法,推荐参看李庆扬等写的《非线性方程组的数值解法》。
楼主可参看R.A.Horn的矩阵分析卷一
雅可比矩阵
雅可比矩阵定义:
雅可比矩阵定义为向量对向量的微分矩阵,定义式如下:
见所附jpg图片。
雅克比矩阵在有限单元法中指的是全局坐标对局部坐标的偏导数,我们在由节点位移求解节点应变的时候会碰到形函数对整体坐标的偏导问题,即求解B矩阵,由于形函数对整体坐标的偏导比较难求,我们可以先求形函数对局部坐标的偏导数,然后利用雅克比矩阵转化为形函数对整体坐标的偏导数。
雅克比矩阵其实质和泛函求导数中泛函中的变量对自变量的导数是一样的。
只不过一个是矩阵,一个数数值而已。
在空间问题8节点的线性单元中,雅克比矩阵是3*3得矩阵。
我们在计算过程中还经常用到雅克比行列式的值,它用来判断单元是否畸形,一般雅克比行列式为正,则说明单元形态较好,反之单元形态不好。
雅克比方法是解决线性方程组的一种迭代方法,当现行方程组的阶数较高时,用直接法解方程组时可能误差较大,就要采用迭代方法。
不过雅克比迭代不是一种很高效的迭代方法,高斯-塞德尔迭代方法较其效率要高。
雅克比矩阵必然是n*n的矩阵,因为局部坐标和全局坐标之间的变量的数量永远是相同的
在一般的应用过程中,局部坐标和整体坐标线性无关且数目相等,所以雅克比矩阵是方阵,并且行列式不恒为零。
但是,从纯数学的角度讲,如果允许广义坐标之间线性相关,那么雅克比矩阵可能不是方阵,即使是方阵,行列式也可能恒为零。
讨论Jacobi矩阵不能仅限于有限元。
应用数学上是这样定义的:
设有n个变元的m个函数yi=fi(x1,x2,......,xn)(i=1,2,......,m),A=D(y1,...,ym)/D(x
 升级会员
升级会员 