一控制系统典型环节的模拟.docx
《一控制系统典型环节的模拟.docx》由会员分享,可在线阅读,更多相关《一控制系统典型环节的模拟.docx(21页珍藏版)》请在冰豆网上搜索。
一控制系统典型环节的模拟
实验一控制系统典型环节的模拟实验
一、实验目的
1.掌握控制系统中各典型环节的电路模拟及其参数的测定方法。
2.测量典型环节的阶跃响应曲线,了解参数变化对环节输出性能的影响。
二、实验内容
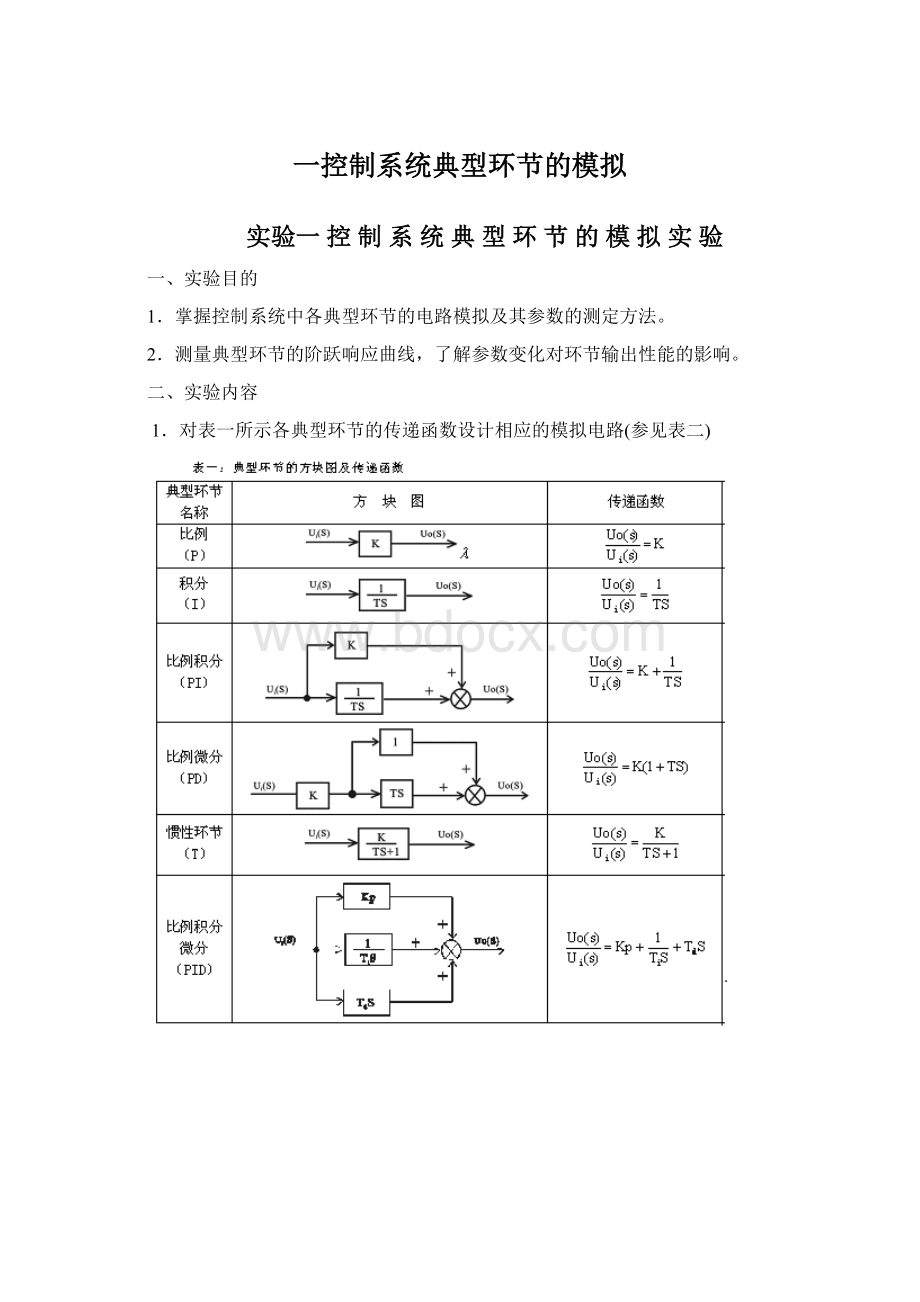
1.对表一所示各典型环节的传递函数设计相应的模拟电路(参见表二)
2.测试各典型环节在单位阶跃信号作用下的输出响应。
3.改变各典型环节的相关参数,观测对输出响应的影响。
三、实验内容及步骤
1.观测比例、积分、比例积分、比例微分和惯性环节的阶跃响应曲线。
①准备:
使运放处于工作状态。
将信号发生器单元U1的ST端与+5V端用“短路块”短接,使模拟电路中的场效应管(K30A)夹断,这时运放处于工作状态。
②阶跃信号的产生:
电路可采用图1-1所示电路,它由“阶跃信号单元”(U3)及“给定单元”(U4)组成。
具体线路形成:
在U3单元中,将H1与+5V端用1号实验导线连接,H2端用1号实验导线接至U4单元的X端;在U4单元中,将Z端和GND端用1号实验导线连接,最后由插座的Y端输出信号。
以后实验若再用阶跃信号时,方法同上,不再赘述。
实验步骤:
①按表二中的各典型环节的模拟电路图将线接好(先接比例)。
(PID先不接)
②将模拟电路输入端(Ui)与阶跃信号的输出端Y相连接;模拟电路的输出端(Uo)接至示波器。
③按下按钮(或松开按钮)SP时,用示波器观测输出端的实际响应曲线Uo(t),且将结果记下。
改变比例参数,重新观测结果。
④同理得积分、比例积分、比例微分和惯性环节的实际响应曲线,它们的理想曲线和实际响应曲线参见表三。
2.观察PID环节的响应曲线。
实验步骤:
①将U1单元的周期性方波信号(U1单元的ST端改为与S端用短路块短接,S11波段开关置于“方波”档,“OUT”端的输出电压即为方波信号电压,信号周期由波段开关S11和电位器W11调节,信号幅值由电位器W12调节。
以信号幅值小、信号周期较长比较适宜)。
②参照表二中的PID模拟电路图,按相关参数要求将PID电路连接好。
③将①中产生的周期性方波信号加到PID环节的输入端(Ui),用示波器观测PID输出端(Uo),改变电路参数,重新观察并记录。
四、实验思考题:
1.为什么PI和PID在阶跃信号作用下,输出的终值为一常量?
2.为什么PD和PID在单位阶跃信号作用下,在t=0时的输出为一有限值?
实验二线性定常系统的瞬态响应和稳定性分析
一、实验目的
1.通过二阶、三阶系统的模拟电路实验,掌握线性定常系统动、静态性能的一般测试方法。
2.研究二阶、三阶系统的参数与其动、静态性能间的关系。
二、实验原理
1.二阶系统
图2-1为二阶系统的方块图。
由图可知,系统的开环传递函数
相应的闭环传递函数为
二阶系统闭环传递函数的标准形式为
比较式①、②得:
表一列出了有关二阶系统在三种情况(欠阻尼,临界阻尼、过阻尼)下具体参数的表达式,以便计算理论值。
图2-2为图2-1的模拟电路,其中τ=1s,T1=0.1s,K1分别为10、5、2.5、1,即当电路中的电阻R值分别为10K、20K、40K、100K时系统相应的阻尼比ξ为0.5、
、1、1.58,它们的单位阶跃响应曲线为表二所示。
②模拟电路图:
2.三阶系统
图2—3、图2—4分别为系统的方块图和模拟电路图。
由图可知,该系统的开环传递函数为:
系统的闭环特征方程:
S(T1+1)(T2S+1)+K=0
即0.051S3+0.61S2+3+K=0
由Routh稳定判据可知K≈12(系统稳定的临界值)系统产生等幅振荡,K>12,系统不稳定,K<12,系统稳定。
三、实验内容
1.通过对二阶系统开环增益的调节,使系统分别呈现为欠阻尼0<ξ<1(R=10K,K=10),临界阻尼ξ=1(R=40K,K=2.5)和过阻尼ξ>1(R=100K,K=1)三种状态,并用示波器记录它们的阶跃响应曲线。
2.能过对二阶系统开环增益K的调节,使系统的阻尼比ξ=
=0.707(R=20K,K=5),观测此时系统在阶跃信号作用下的动态性能指标:
超调量Mp,上升时间tp和调整时间ts。
3.研究三阶系统的开环增益K或一个慢性环节时间常数T的变化对系统动态性能的影响。
4.由实验确定三阶系统稳定由临界K值,并与理论计算结果进行比较。
四、实验步骤
准备工作:
将“信号发生器单元”U1的ST端和+5V端用“短路块”短接,并使运放反馈网络上的场效应管3DJ6夹断。
1.二阶系统瞬态性能的测试
①按图2-2接线,并使R分别等于100K、40K、10K用于示波器,分别观测系统的阶跃的输出响应波形。
②调节R,使R=20K,(此时ξ=0.707),然后用示波器观测系统的阶跃响应曲线,并由曲线测出超调量Mp,上升时间tp和调整时间ts。
并将测量值与理论计算值进行比较,参数取值及响应曲线参见表一、二。
2.三阶系统性能的测试
①按图2-4接线,并使R=30K。
②用示波器观测系统在阶跃信号作用下的输出波形。
③减小开环增益(令R=42.6K,100K),观测这二种情况下系统的阶跃响应曲线。
④在同一个K值下,如K=5.1(对应的R=100K),将第一个惯性环节的时间常数由0.1s变为1s,然后再用示波器观测系统的阶跃响应曲线。
并将测量值与理论计算值进行比较,参数取值及响应曲线参见表三、四。
五、实验思考题
1.为什么图2-1所示的二阶系统不论K增至多大,该系统总是稳定的?
2.通过改变三阶系统的开环增益K和第一个惯性环节的时间常数,讨论得出它们的变化对系统的动态性能产生什么影响?
实验三自动控制系统的校正
一、实验目的
1.掌握串联校正装置设计的一般方法。
2.设计一个有源串联超前校正装置,使之满足实验系统动、静态性能的要求。
二、实验内容
1.未校正系统的方块图如图3—1所示,设计相应的模拟电路图,参见图3—2。
2.由闭环传递函数
3.用示波器观测并记录未校正系统在阶跃信号作用下的动态性能指标Mp、ts、tp
4.根据系统动态性能的要求,设计一个超前校正装置,其传递函数为:
其模拟电路图为3—3所示。
要求校正后系统Kv=20,Mp=0.25,ts≤1s,
、
校正后系统的方块图为图3—4所示
由图可知,该系统的开环传递函数为
与二阶系统标准形式的开环传递函数相比较,得
三、实验步骤
准备:
将“信号发生器单元”U1的ST端和+5V端用短路块短接。
1.按照图3—2接线,并核对图中各环节的参数是否完全满足图3—1所示系统的要求。
2.加入阶跃输入电压,用示波器观察并记录系统输出响应曲线及其性能指标:
超调量Mp和调节时间ts。
3.按图3—5的要求接入校正装置。
4.在图3—5的输入端引入阶跃控制电压,并用示波器观察和记录校正后系统的超调量Mp和调节时间ts,以检验系统是否完全满足预期的设计要求。
5.具体参数及响应曲线请参照表3-1。
四、实验思考题
1.阶跃输入信号为什么不能取得太大?
2.为什么图3—3所示的校正装置是超前校正装置?
3.你能解释校正后系统的瞬态响应变快的原因吗?
实验四控制系统的频率特性
1.被测系统的方块图及原理:
图4—1
系统(或环节)的频率特性G(jω)是一个复变量,可以表示成以角频率ω为参数的幅值和相角。
G(jω)=|G(jω)|G(jω)(4—1)
本实验应用频率特性测试仪测量系统或环节的频率特性。
图4—1所示系统的开环频率特性为:
(4—2)
采用对数幅频特性和相频特性表示,则式(4—2)表示为:
20lg|G1(jω)G2(jω)H(jω)|=20lg|
|
=20lg|B(jω)|—20lg|E(jω)|(4—3)
G1(jω)G2(jω)H(jω)=/
=/B(jω)—/E(jω)(4—4)
将频率特性测试仪内信号发生器产生的超低频正弦信号的频率从低到高变化,并施加于被测系统的输入端[r(t)],然后分别测量相应的反馈信号[b(t)]和误差信号[e(t)]的对数幅值和相位。
频率特性测试仪测试数据经相关器件运算后在显示器中显示。
根据式(4—3)和式(4—4)分别计算出各个频率下的开环对数幅值和相位,在半对数坐标纸上作出实验曲线:
开环对数幅频曲线和相频曲线。
根据实验开环对数幅频曲线画出开环对数幅频曲线的渐近线,再根据渐近线的斜率和转角频确定频率特性(或传递函数)。
所确定的频率特性(或传递函数)的正确性可以由测量的相频曲线来检验,对最小相位系统而言,实际测量所得的相频曲线必须与由确定的频率特性(或传递函数)所画出的理论相频曲线在一定程度上相符。
如果测量所得的相位在高频(相对于转角频率)时不等于-90°(q-p)[式中p和q分别表示传递函数分子和分母的阶次],那么,频率特性(或传递函数)必定是一个非最小相位系统的频率特性。
2.被测系统的模拟电路图:
见图4-2
图4—2被测系统
注意:
所测点-c(t)、-e(t)由于反相器的作用,输出均为负值,若要测其正的输出点,可分别在-c(t)、-e(t)之后串接一组1/1的比例环节,比例环节的输出即为c(t)、e(t)的正输出。
3.实验内容及步骤
在此实验中,我们利用TKKL-4型系统中的U15D/A转换单元将提供频率和幅值均可调的基准正弦信号源,作为被测对象的输入信号,而TKKL-4型系统中测量单元的CH1通道用来观测被测环节的输出(本实验中请使用频率特性分析示波器),选择不同角频率及幅值的正弦信号源作为对象的输入,可测得相应的环节输出,并在PC机屏幕上显示,我们可以根据所测得的数据正确描述对象的幅频和相频特性图。
具体实验步骤如下:
(1)将U15D/A转换单元的OUT端接到对象的输入端。
(2)将测量单元的CH1(必须拨为乘1档)接至对象的输出端。
(3)将U1信号发生器单元的ST和S端断开,用1号实验导线将ST端接至CPU单元中的PB10。
(由于在每次测量前,应对对象进行一次回零操作,ST即为对象锁零控制端,在这里,我们用8255的PB10口对ST进行程序控制)
(4)在PC机上输入相应的角频率,并输入合适的幅值,按ENTER键后,输入的角频率开始闪烁,直至测量完毕时停止,屏幕即显示所测对象的输出及信号源,移动游标,可得到相应的幅值和相位。
(5)如需重新测试,则按“New”键,系统会清除当前的测试结果,并等待输入新的角频率,准备开始进行下次测试。
(6)根据测量在不同频率和幅值的信号源作用下系统误差e(t)及反馈c(t)的幅值、相对于信号源的相角差,用户可自行计算并画出闭环系统的开环幅频和相频曲线。
4.实验数据处理及被测系统的开环对数幅频曲线和相频曲线
表4-1实验数据(ω=2πf)
实验中,由于传递函数是经拉氏变换推导出的,而拉氏变换是一种线性积分运算,因此它适用于线性定常系统,所以必须用示波器观察系统各环节波形,避免系统进入非线性状态。
根据表4-1的实验测量得的数据,画出开环对数幅频线和相频曲线,如图4-3所示。
实验中,系统输入正弦信号的幅值不能太大,否则反馈幅值更大,不易读出,同理,太小也不易读出。
实验五采样控制系统的分析
一、实验目的
1.通过本实验进一步理解香农采样定理和零阶保持器ZOH的原理及其实现方法。
2.利用组件LF398组成一个采样控制系统,并研究采样周期T的大小对该系统性能的影响。
二、实验原理
图8—1为信号的采样与恢复的方块图。
图中X(t)是t的连续信号,经采样开关采样后,变为离散信号X*(t)。
香农采样定理证明要使被采样后的离散信号X*(t)能不失真地恢复原有的连续信号X(t),其充分条件为:
ωs≥2ωmax………………………①
式中ωs为采样的角频率,ωmax为连续信号的最高角频率。
由于ωs=
,因而式①可改写为
T为采样周期。
采样控制系统稳定的充要条件是其特征方程的根均位于Z平面上以作标原点为圆心的单位圆内,且这种系统的动、静态性能均只与采样周期T有关。
三、实验内容
1.信号的采样与恢复
本实验采用“采样—保持器”组件LF398,它具有将连续信号离散后的零阶保持器输出信号的功能。
图8—2为采样—保持电路。
图中MC1555为产生方波的多谐振荡,MC14538为单稳态电路。
改变多谐振荡器的周期,即改变采样周期T。
图8—3为LF398的接线图。
2.闭环采样控制系统的研究
图8—4为采样控制系统的方块图,图中
为零阶保持器ZOH的传递函数,图8—5为该系统的模拟电路图。
图8—4采样控制系统方块图
根据上式可判别该采样控制系统是否稳定,并可用迭代法求出该系统的阶跃输出响应。
四、实验内容及步骤
准备:
将信号发生器单元U1的ST端和+5V端用“短路块”短接。
实验步骤:
(1)信号的采样保持与采样周期的关系
①按图8—2接线。
②将U2正弦信号发生器单元的频率为2Hz的正弦信号接至LF398的输入端。
③将U1信号发生器单元的波段开关S12置于“T2”档,调节调频电位器W11使采样周期T=50ms。
④用示波器同时观测LF398的输出波形和输入波形。
此时输出波形和输入波形一致。
⑤改变采样周期,直至250ms,观测输出波形。
此时输出波形仍为输入波形的采样波形,还未失真,但当T>250ms时,没有输出波形,即系统采样失真,从而验证了香农定理。
(2)采样系统的稳定性及瞬态响应
①按图8—5接线。
②取T=3ms。
③加阶跃信号r(t),观察并记录系统的输出波形C(t),测量超调量Mp。
④将信号发生器单元的波段开关S12置于“T2”档,调节调频电位器W11使采样周期T=30ms,系统加入阶跃信号,观察并记录系统输出波形,测出超调量Mp。
⑤调节电位器W11使采样周期T=150ms,观察并记录系统的输出波形。
⑥实验结果见表8—1
从表测说明了系统的稳定性与采样周期大小有关。
 升级会员
升级会员 