合肥琥珀中学物理第十一章 简单机械和功单元达标训练题Word版 含答案.docx
《合肥琥珀中学物理第十一章 简单机械和功单元达标训练题Word版 含答案.docx》由会员分享,可在线阅读,更多相关《合肥琥珀中学物理第十一章 简单机械和功单元达标训练题Word版 含答案.docx(22页珍藏版)》请在冰豆网上搜索。
合肥琥珀中学物理第十一章简单机械和功单元达标训练题Word版含答案
合肥琥珀中学物理第十一章简单机械和功单元达标训练题(Word版含答案)
一、初三物理第十一章简单机械和功易错压轴题提优(难)
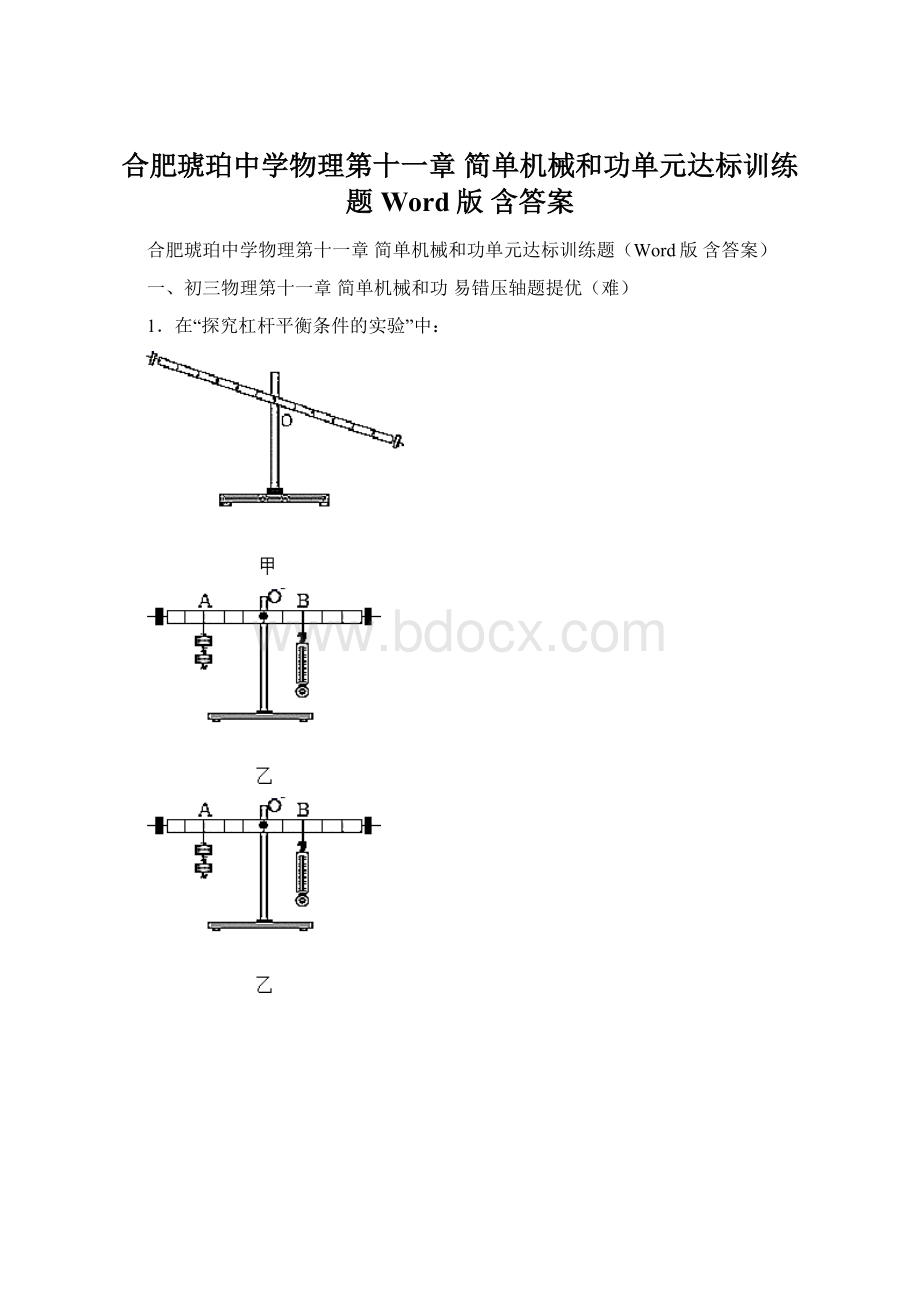
1.在“探究杠杆平衡条件的实验”中:
(1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。
(2)如图乙所示,在A点挂2个重力均为0.5N的钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。
(3)如图丙,保持A点所挂砝码的数量和位置不变,将弹簧测力计绕B点从a位置转到b位置,杠杆始终保持水平平衡,在此过程中拉力F与其力臂的乘积变化情况是______________。
A.一直变小B.一直变大C.一直不变D.先变小后变大
(4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”或“不变”)。
(5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B点_____(选填“顺时针”或“逆时针”)方向转动一个小角度。
(6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。
(7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G的钩码挂在杠杆A处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。
若将钩码移动到B点,仍将它匀速提升h的高度,则此时弹簧测力计的示数F'________(选填“>”“=”或“<”)F,杠杆此时的机械效率η´___________η(选择“>”、“=”或“<”)。
【答案】平衡左1.5C变小不变顺时针杠杆自重对杠杆平衡有影响
×100%>>
【解析】
【分析】
【详解】
(1)[1]杠杆处于静止状态或匀速转动状态都为杠杆的平衡状态;所以,图甲中实验前没挂钩码时,杠杆处于静止的平衡状态。
[2]由于杠杆左端上翘,调节时重心应向左移动,应将杠杆两端的平衡螺母向左移,使杠杆在水平位置平衡。
(2)[3]如图乙所示,在刻度线A处挂两个钩码,在刻度线B处用调好的弹簧测力计竖直向下拉杠杆,杠杆在水平位置时,每个钩码为G=0.5N,每小格为L,根据杠杆的平衡条件知道,即
2G×3L=F×2L
2×0.5N×3L=F×2L
解得F=1.5N
(3)[4]将测力计绕B点从a位置转动到b位置过程中,钩码的重力不变,其力臂OA不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件知道,拉力F与其力臂的乘积也是不变的。
故选C。
(4)[5][6]力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以拉力大小不变。
(5)[7]根据杠杆平衡条件知道,要使弹簧测力计读数减小,在阻力和阻力臂不变时,需要增大动力臂,当弹簧测力计与杠杆垂直时,动力臂最长,拉力最小,所以需要将弹簧测力计顺时针转动。
(6)[8]利用如图戊所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响。
(7)[9]由
知道,将总重为G的钩码挂在杠杆A处时,杠杆的机械效率
[10]由图示知道,将钩码移动到B点时,阻力和动力臂都不变,阻力臂增大,由
知道,动力将增大,即
F′>F
[11]将钩码移至B点,提升相同高度,有用功相同,弹簧测力计竖直移动的距离不同,B点时杠杆上上升的高度小些,做的额外功小些,所以机械效率变大,即
η′>η
2.在“测量滑轮组的机械效率”的实验中,某组同学用滑轮安装了如图甲、乙所示的滑轮组,实验测得的数据如下表所示:
次数
物体的重力G/N
物体被提升高度h/m
拉力F/N
绳端移动的距离s/m
机械效率η
1
2
0.1
1.0
0.3
66.7%
2
3
0.1
1.4
0.3
71.4%
3
4
0.1
1.8
0.3
74.1%
4
2
0.1
1.5
0.2
(1)表格内的第4次实验中应补充的数据是_______(结果精确到0.1%)。
这次数据是用图_________(选填“甲”或“乙”)所示的滑轮组测得的;
(2)分析比较第1、2、3次实验数据可以判定,若增大提升物体的重力,滑轮组的机械效率_________(选填“变大”“不变”或“变小”);
(3)用甲滑轮组提升不同重物时,绳重和摩擦导致的额外功与总功的比为定值k,根据表格中的数据可求出k=_________。
【答案】66.7乙变大
【解析】
【分析】
【详解】
(1)[1]表格中第四次的有用功
W有=Gh=2N×0.1m=0.2J
总功
W总=Fs=1.5N×0.2m=0.3J
那么机械效率
[2]由于s=2h,所以所用滑轮组的承重绳子数为2根,则用的是图乙。
(2)[2]由表格数据可知,从1至3次实验,在增大提升物体的重力时,滑轮组的机械效率越来越大。
(3)[3]假设绳重和摩擦导致的额外功为W其它,根据题意有
第一次实验时,滑轮组做的总功及有用功分别为
W总1=F1s1=1.0N×0.3m=0.3J,W有1=G1h1=2N×0.1m=0.2J
即
W其它1=0.3J⋅k
第二次实验时,滑轮组做的总功和有用功分别为
W总2=F2s2=1.4N×3m=0.42J,W有2=G2h2=3N×0.1m=0.3J
第一、二次实验,滑轮组所做的总功和有用功分别增加了
W总2-W总1=0.42J-0.3J=0.12J,W有2-W有1=0.3J-0.2J=0.1J
而滑轮组所做的总功
W总=W有+W动+W其它
可是,滑轮组每次做功,动滑轮所做的功不变,即两次做功,绳重和摩擦导致的额外功增加了0.02J,那么
所以
3.在“探究杠杆平衡条件”的实验中,杠杆刻度均匀,每个钩码的重力均为
。
(1)实验开始时,杠杆如图甲所示处于静止状态。
为使杠杆在水平位置平衡,应将两端的平衡螺母向______移动(选填“左”或“右”);
(2)调节杠杆水平平衡后,如图乙所示,在M点挂上2个钩码,在N点挂上3个钩码。
此时,杠杆在水平位置______(选填“平衡”或“不平衡”);
(3)用弹簧测力计和钩码配合使用,也可以探究杠杆平衡条件。
如图丙所示,用弹簧测力计在A处竖直向上拉杠杆,使其在水平位置平衡,此时弹簧测力计示数为______N。
【答案】左不平衡1.2
【解析】
【分析】
(1)如果杠杆左端下沉,应向右调节平衡螺母,如果杠杆右端下沉,应向左调节平衡螺母,使杠杆在平衡位置平衡;
(2)杠杆是否平衡,取决于两边力和力臂的乘积是否相等,若
,杠杆平衡;若
,杠杆就不平衡,会沿力和力臂乘积大的力的方向转动;
(3)左侧钩码对杠杆的作用力向下,使杠杆沿逆时针转动,则弹簧测力计施加的力使杠杆沿顺时针转动,保持杠杆平衡;杠杆平衡条件
计算出弹簧秤的示数,判断弹簧测力计的位置。
【详解】
(1)[1]图甲中,杠杆右端下沉,为了使杠杆在水平位置平衡,应将杠杆两端的螺母向左调。
(2)[2]图乙中,设一格长度为L,一个钩码重G,则有
即右边的力和力臂的乘积大于左边的力和力臂的乘积,杠杆不能在水平位置平衡,会沿顺时针方向转动。
(3)[3]丙图中钩码的重力
由杠杆平衡条件
可得
拉力在A处竖直向上拉杠杆,使其在水平位置平衡,则
此时弹簧测力计示数为
。
【点睛】
本题主要考查对“探究杠杆平衡条件”的实验内容的了解。
杠杆的平衡条件:
动力
动力臂
阻力
阻力臂,即
;运用此条件进行杠杆平衡的计算。
4.在做“探究杠杆的平衡条件”的实验中:
(1)如图甲所示,为使杠杆在______位置平衡,可以将左端的平衡螺母向______调;
(2)调节平衡后,在杠杆两侧挂不同数量的钩码,移动钩码位置,使杠杆在水平位置再次平衡,并记录相关数据。
改变钩码的数量及位置多次实验,小明得出杠杆的平衡条件______。
如图乙所示,A、B两点分别增加一个钩码,则杠杆______(选填“左端下沉”、“右端下沉”或“仍保持平衡”);
(3)如图丙所示,若不在B点挂钩码,改用弹簧测力计在B点向下拉杠杆,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐______(选填“增大”或“减小”),原因是弹簧测力计拉力的力臂在______(选填“增大”或“减小”)。
【答案】水平左动力×动力臂=阻力×阻力臂或F1L1=F2L2右端下沉增大减小
【解析】
【分析】
【详解】
(1)[1][2]如图甲所示,杠杆右端下沉,左端上翘,应该将左端的平衡螺母向左调,使杠杆重新在水平位置平衡。
(2)[3]如图乙所示,假设一个钩码重力为G,横杆上一小格为L,调节平衡后,在杠杆两侧挂不同数量的钩码,移动钩码位置,使杠杆在水平位置再次平衡,并记录相关数据。
得到
左边=F2L2=3G×2L=6GL
右边=F1L1=2G×3L=6GL
左边等于右边,改变钩码的数量及位置多次实验,左边依然等于右边,小明据此得出杠杆的平衡条件:
动力×动力臂=阻力×阻力臂或F1L1=F2L2
[4]如图乙所示,A、B两点分别增加一个钩码,则
各自增加一个钩码后,右边大于左边,所以杠杆右端下沉。
(3)[5][6]如图丙所示,A点钩码数量不变,钩码对杠杆施加的拉力方向不变,现在将B点的弹簧测力计由竖直方向逐渐向左转动,则弹簧测力计拉力的力臂减小,为使杠杆始终保持水平平衡,根据杠杆的平衡条件可知,则弹簧测力计拉力增大,即弹簧测力计的示数将逐渐增大。
5.小华利用如图所示的装置来探究“杠杆的平衡条件”。
(1)实验前杠杆静止在如甲图所示位置,则此时杠杆是否平衡?
____(选填“是”、“否”),杠杆的重心是否在支点上?
________(选填“是”、“否”),若使杠杆在水平位置平衡,左边的螺母应向______移动;
(2)如乙图,杠杆调节平衡后,小华在B点悬挂了3个钩码,若要使杠杆再次平衡,D点应该挂_____个钩码。
如果此时两边再各增加一个钩码,则杠杆将向_______边倾斜;
(3)如图丙所示,小华在A、C两点分别悬挂等重的载物盘,制作了一个天平,左盘放物体,右盘加减砝码,此天平是利用了哪一类杠杆制作而成的?
________。
假如支点O因某种原因向右偏移,则天平的测量值____真实值(选填“大于”“等于”或“小于”)。
【答案】是否右4左等臂杠杆大于
【解析】
【分析】
【详解】
(1)[1]杠杆静止在如甲图所示位置保持静止状态,受力平衡,则此时杠杆是平衡的。
[2]如图甲所示,此时杠杆左端下沉,说明杠杆的重心不在支点上,而是在支点的左端的某一点。
[3]如图甲所示,此时杠杆左端下沉,右端上翘,则应该将平衡螺母向右调使杠杆重新平衡。
(2)[4]如图乙所示,假设一个钩码重为G,杠杆上一格为L,在B点悬挂了3个钩码,则杠杆左端为
根据杠杆平衡条件有
即需要在D点挂4个钩码才
 升级会员
升级会员 