机械原理哈课后习题.docx
《机械原理哈课后习题.docx》由会员分享,可在线阅读,更多相关《机械原理哈课后习题.docx(14页珍藏版)》请在冰豆网上搜索。
机械原理哈课后习题
机械原理(哈)课后习题
机械原理习题
第二章习题
2-1解释下列概念
1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5•咼副低代。
2-
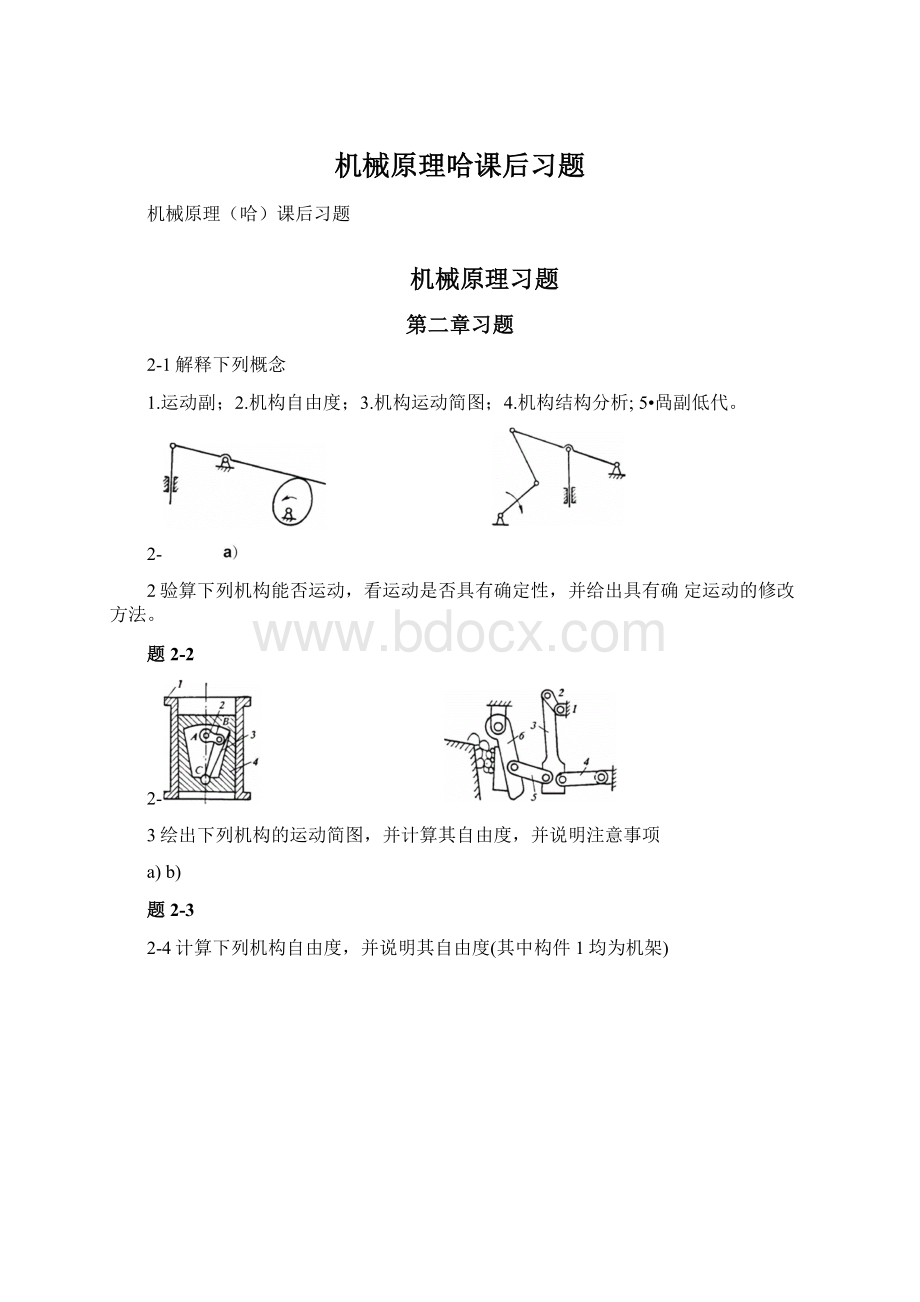
2验算下列机构能否运动,看运动是否具有确定性,并给出具有确定运动的修改方法。
题2-2
2-
3绘出下列机构的运动简图,并计算其自由度,并说明注意事项
a)b)
题2-3
2-4计算下列机构自由度,并说明其自由度(其中构件1均为机架)
3-
e)
题2-4
2-5计算下列机构的自由度,并确定杆组及机构的级别(如图所示机构分别以构件2、4、8为原动件)。
第三章习题
AD为机架,并且1)若此机构为曲柄摇杆机构,且AB为曲柄,求Iab
的最大值;2)若此机构为双曲柄机构,求Iab的最小值;3)若此机
4-
4试求图示各机构在图示位置时全部瞬心的位置。
3-6在图示凸轮机构中,已知r=50mm,IOa二22mm,lAC=80mm,—90?
凸轮,凸轮1以角速度」=10rad/s逆时针方向转动。
试用瞬心法求从动件2的角速度「2。
3-7在的四杆机构ABCD中,Iab=60mm,lC^90mm,%"bc=120mm,
•2=10rad/s,试用瞬心法求:
1)当,=165:
时,点C的速度v;2)当—165:
时,构件3的BC线上(或其延长线上)速度最小的一点E的位置及其速度的大小;3)当%=0时,「角的值(有两个解)。
3-8在转动导杆机构机构中,已知Iac二50mm,Ibc二100mm,
■'2=20rad/s,求在一个运动循环中,构件3的角位移、角速度和角加速度。
3-11已知lAB=150mm,lBC=600mm,lCE=120mm,lC°=500mm,
lEF=600mm,xD=400mm,yD=500mm,yF=600mm,曲柄1作等速转动,其转速m=5r/min。
求在一个运动循环中活塞5的位移、速度和加速度变化曲线。
3-20设计一铰链四杆机构,已知其摇杆CD的长度Icd=75mm,行程
速比系数K=1.5,机架AD的长度lAD=100mm,摇杆的一个极限位置与机架间的夹角「3二45',求曲柄的长度Iab和连杆的长度Ibc。
ID____
ff///////
题图一0
3-21设计一曲柄摇杆机构,已知其摇杆CD的长度lc^290mm,摇杆两极限位置间的夹角・=32:
行程速比系数K=1.25,若曲柄的长度Iab=75mm,求连杆的长度仁和机架的长度Iad。
并校验最小传动角min是否在允许值范围内。
题3-21
3-22设计一偏置曲柄滑块机构,已知滑块的行程速比系数K=1.5,滑块的冲程lcic2=50mm,导路的偏距e=20mm,求曲柄长度Iab和连杆长度lBC°
3-24试设计一铰链四杆机构,近似实现函数y=logX,1)设x的变化区间为1乞x乞2,先用解析法求出此机构,再用数值比较法的程序计算,并比较其结果。
2)多次改变x的变化区间,用数值比较法求出结果,分析其变化情况。
3-25如图所示,当连架杆AB处于A1B1、A2B2和A3B3位置,另一连架杆CD上的某一标线DE对应处于位置DE“、DE2和DE3时,两
连架杆所对应的角位置分别为:
—55,'-^60;「2=75,=85,;
3=105,'-:
3=ioo。
若给定lAD=300mm,试设计此铰链四杆机构,并讨论是否还可以再给定其它杆长限制,如再给定LAB=100mm是否可以设计出该机构。
3-26已知颚式破碎机的行程速比系数K=1.2,颚板长度Lcd二350mm,其摆角t=35:
,曲柄长度Lab=80mm,试确定该机构的连杆BC和机架AD的长度,并验算其最小传动角min是否在允许范围之内。
3-28用铰链四杆机构作电炉炉门的启闭机构,若已知其两活动铰链中心B、C的位置及炉门的两个位置尺寸如图示,试确定固定铰链中心A、D位置及AB、BC、CD各杆杆长。
题3-28
3-33为什么机器人操作机多选用开式链机构的型式,其主要优点是什么?
3-34什么是机器人运动学正问题?
试举一个二自由度或三自由度机器人的例子来进行运动学正问题求解练习。
第四章习题
4-1在摆动从动件盘形凸轮机构中,从动件行程角<max=30:
J.J20$“20A:
.=120:
,从动件推程、回程分别采用等加速
等减速和正弦加速度运动规律;试写出摆动从动件在各行程的位移方程式。
4-3在图示偏置滚子直动从动件盘形凸轮机构中,凸轮1的工作轮廓
为圆,其圆心和半径分别为C和R,凸轮1沿逆时针方向转动,推动从动件往复移动。
已知:
R=100mm,OC=20mm,偏距e=10mm,滚子半径rr^I0mm,试回答:
1)绘出凸轮的理论轮廓;2)凸轮基圆半径5二?
从动件行程h=?
3)推程运动角门°二?
回程运动角叮-0二?
远休止角叮%二?
近休止角叮%二?
4)从动件推程、回程位移方程式;5)凸轮
机构的最大压力角:
max二?
最小压力角min-?
又分别在工作轮廓上哪
5-4在图示滚子摆动从动件盘形凸轮机构中,凸轮1的工作轮廓为圆
其圆心和半径分别为C和R,凸轮1沿顺时针方向转动,推动从动件往复摆动。
已知:
R=100mm,O^30mm,摆杆长度I=90mm,中心距a=125mm,滚子半径rr=i0mm,试回答:
1)绘出凸轮的理论轮廓;
2)该机构为推摆式还是拉摆式?
3)推程运动角门。
=?
回程运动角
:
.:
」o二?
远休止角:
.:
匕=?
近休止角叮“?
4)凸轮基圆半径r。
二?
从动件形成角'■■■max二?
5)凸轮机构的最大压力角:
max=?
最小压力角:
-min二?
又分别在工作轮廓上那点出现?
6)行程速比系数K二?
4-6设计偏置滚子直动从动件盘形凸轮。
已知:
凸轮1沿瞬时针方向等速转动,凸轮基圆半径ro=40mm,偏距e=10mm,从动件行程
h=30mm,滚子半径rr-10mm,o=150「^30:
',Jo=120:
s=60:
;
从动件在推程、回程皆采用简谐运动规律,试求凸轮理论轮廓和工作轮廓上各点的坐标值,并绘出凸轮的理论轮廓与工作轮廓。
第五章习题
5-2在图示的渐开线齿阔中,基圆半径rb=100mm,试求出:
1)当rK=135mm时,渐开线的展角去,渐开线压力角:
k和渐开线在K点的曲率半径匚。
2)K=20:
、25-和30:
,渐开线的压力角K和向径rK。
渐开歧/\
y斤y发生线
题5-2
6-4今测得一渐开线直齿标准齿轮齿顶圆直径da=110mm,齿根圆直径df=87.5mm,齿数z=20,试确定该齿轮的模数m,齿顶高系数h;和顶隙系数c*。
5-5已知一对外啮合渐开线直齿圆柱齿轮,齿数乙=20,Z2=41,模
数m=2mm,h;=1,c*=0.25,〉=20:
,求:
1)当该对齿轮为标准齿轮时,试计算齿轮的分度圆直径d!
、d2,基圆直径dm、db2,齿顶圆直径d;i、d;2,齿根圆直径df!
、df2,分度圆上齿距p、齿厚s和齿槽宽e。
2)当该对齿轮为标准齿轮且为正确安装时的中心距a,齿轮1
的齿顶压力角:
'i,齿顶处齿阔的曲率半径;?
;i。
5-6渐开线标准齿轮的基圆和齿根圆重合时的齿数为多少(考虑正常
齿和短齿两种情况)?
齿数为多少时基圆大于齿根圆?
5-7已知一对外啮合渐开线标准直齿圆柱齿轮,其传动比"=2.4,模数m=5mm,压力角=20■,h;=1,c*=0.25,中心距170mm,试求该对齿轮的齿数Z1,Z2,分度圆直径d1、d2,齿顶圆直径d;1、d;2,基圆直径db1、db2。
5-8试指出题5-7的一对齿轮中,哪一个齿轮的基圆齿厚基圆直径9大一些?
计算出该对齿轮的公法线长度和相应的跨齿数。
5-11设有一对外啮合直齿圆柱齿轮zi=20,Z2=31,模数m=5mm,压力角:
=20:
齿顶高系数h;=1,试求出其标准中心距a,当实际中心距a'130mm时,其啮合角厂为多少?
当取啮合角a、25:
时,试计算出该对齿轮的实际中心距ao
5-12对5-11中的一对齿轮,当给定中心距a、130mm和给定啮合角a丄25泊勺两种情况,试选择合适的变位系数xi、X2以满足这两种传动要求。
5-13在回归轮系中,已知乙=15,Z2=53,m1,2=2mm;Z3=21,z^32,□3,4=2.5mm,各齿轮的压力角均为20。
,试问:
这两对齿轮能否均用标准齿轮传动?
若用变位齿轮传动,可能有几种传动方案?
用哪一种方案比较好?
5-15已知一对外啮合变位齿轮,乙=15,Z2=42,若取x^:
1.0,
X2=-1.0,m=2mm,h;=1,c*=0.25,〉=20:
试计算该对齿轮传动的中心距a■,啮合角:
-',齿顶圆直径da1、da2,齿顶厚Sa1、Sa2,试判断该对齿轮能否正常啮合传动?
为什么?
5-16设有一对平行轴外啮合齿轮传动,乙=18,Z2=35,m=2mm,中
心距a=54mm时,若不用变位直齿轮而用斜齿圆柱齿轮来配凑此中心距,其螺旋角[应为多少?
5-17设一对斜齿圆柱齿轮,乙=20,Z2=41,m=4mm,=20:
,若取其螺旋角2-15z,在求得中心距a进行圆整后再最后确定螺旋角[值,试计算:
1)该对斜齿轮分度圆及齿顶圆直径。
2)若齿宽B=30mm,试计算其端面重合度;八轴向重合度「和总重合度;。
3)求当量齿数Zvi、Zv2,并决定加工时的铣刀号数。
5-19已知一螺杆传动的参数为:
螺杆头数乙=1,传动比G=40,蜗轮直径d^200mm,蜗杆的导程角咐=5.7「,试确定:
模数m,传动中心距a。
5-21已知一对直齿圆锥齿轮的基本为:
乙=15,Z2=30,m=10mm,
h;=1,c^-0.2,-=90:
试计算该对圆锥齿轮的基本尺寸,并判断小齿轮Z!
是否会产生根切。
第六章习题
6-3在图示的蜗杆传动中,试分别在左右两图上标出蜗杆1的旋向和
转向。
6-4图示为一滚齿机工作台的传动机构,工作台与蜗轮5相固联。
已知zi=z;=20,Z2=35,z4=1(右旋),25=40,滚刀26=1(左旋),
Z7=28。
若要加工一个Z5=64的齿轮,试决定挂轮组各轮的齿数Z2和
Z40
题6-4
6-6在图示轮系中,已知Zi=60,Z2=15,Z3=18,各轮均为标准齿轮,
且模数相同。
试决定Z4并计算传动比iiH的大小及系杆H的转向。
题6-6
6-8在图示的双级行星齿轮减速器中,各齿轮的齿数为:
Zi=Z6=20,
Z3=Z6=40,Z2=Z5=10,试求:
1)当固定齿轮4时,传动比仏;
2)当固定齿轮3时,传动比仏。
Zi=17,Z3=23,Z4=佃,Z4=20,z5=24。
设轮胎受压变形后使28英寸的车轮的有效直径为0・7m,当车行1km时,表上的指针刚好回转一周,求齿轮2的齿数Z2。
题6-10
第七章习题
7-1偏心楔块式摩擦棘轮机构的偏心楔块是半径等于50mm勺圆弧,
中心距O1O2=100mm摩擦轮直径di=ioomm摩擦系数f=01。
试按:
-=08「的条件确定偏心楔块的几何尺寸(转动中心与圆弧中心间偏距e,转动中心到楔紧点距离I)。
题7-1
7-2外槽轮机构中,已知主动拨盘等速回转,槽轮槽数z,,槽轮
运动角;与停歇角门之比丨=2。
试求:
1)槽轮机构的运动系数•;2)圆销数K。
7-3已知外槽轮机构的槽数z=8,主动拨盘的角速度‘jorad/s。
试求:
1)主动拨盘上圆柱销在什么位置时,槽轮的角加速度;2最
大?
2)槽轮的最大角加速度2max。
7-4设在n个工位的自动机中,用不完全齿轮来实现工作台的间歇
转位运动,若主、从动齿轮的假想齿数(即补全的齿数)相等,
试求从动轮运动时间t2与停歇时间t2之比电为多少?
t2
7-5在单万向联轴节中,轴1以1500r/min等速转动,轴3变速转动,其最高转速为1732r/min。
试求:
1)轴3的最低转速;
2)在轴1转一转中,1为哪些角度时,两轴的转速相等?
第九章习题
9-1在图示减速器中,已知各轮的齿数Zi=Z3=25,Z2=Z4=50,各轮的转动惯量Ji=J3=0・04kgm2,」2=J4=0・16kgm2,(忽略各轴的转动惯量),作用在轴川上的阻力矩M3=100Nm。
试求选取I轴为等效构件时,该机构的等效转动惯量J和M3的等效阻力矩Mr。
题9-1
9-3已知某机械主轴与制动器直接相联,以主轴为等效构件时,机械的等效转动惯量J=1kg•m2,设主轴的稳定运转角速度为
s=150rad/s,求要在3秒钟内实现制动时,制动器的制动力矩。
9-4已知某机械稳定运转时的等效驱动力矩和等效阻力矩如图所示。
机械的等效转动惯量为J=1kg•m2,等效驱动力矩为
Md=30Nm,机械稳定运转开始时等效构件的角速度0=25rad/s,
试确定
(1)等效构件的稳定运动规律■();
(2)速度不均匀系数-;
(3)最大盈亏功.Wx;
(4)若要求[、J=0.05,求飞轮的等效转动惯量Jf。
1
1-
N二—
02
rm甲
题9-4
第十章习题
10-3在图示的盘形转子中,有四个偏心质量位于同一回转平面内,其大小及回转半径分别为mi=5kg,m2=7kg,m3=8kg,m4=6kg;
ri=r4=100mm,r2=200mm,r3=150mm,方位如图所示。
又设平衡质量m的回转半径r=250mm,试求平衡质量m的大小及方位。
10-4在图示的转子中,已知各偏心质量mi=10kg,m2=15kg,
m3=20kg,m4=10kg;它们的回转半径分别为r!
=300mm,r2=「4=150mm,r3=100mm,又知各偏心质量所在的回转平面间的距离为h=l2=l3=200mm,各偏心质量间的方位角为冷=120,:
2=6o,
=90,為wo。
若置于平衡基面I及II中的平衡质量mi和mN的回转半径均为400mm,试求mi及mH的大小和方位。
 升级会员
升级会员 