第10讲第三章第五节静定结构的内力分析三至第七节超静定结构一新版.docx
《第10讲第三章第五节静定结构的内力分析三至第七节超静定结构一新版.docx》由会员分享,可在线阅读,更多相关《第10讲第三章第五节静定结构的内力分析三至第七节超静定结构一新版.docx(10页珍藏版)》请在冰豆网上搜索。
第10讲第三章第五节静定结构的内力分析三至第七节超静定结构一新版
第五节静定结构的内力分析
四、静定平面桁架
静定桁架是由若干根直杆在其两端用铰连接而成的静定结构。
在结点荷载作用下,桁架各杆均为只受轴力的二力杆。
静定桁架架内力分析的一般步骤是先求支座反力,再计算杆件内力。
计算杆件内力(轴力)的基本方法是结点法和截面法。
1.节点法和截面法
截取析架的结点为隔离体,利用各结点的静力平衡条件来计算各杆件内力的方法,称为结点法。
对每一结点,可列出两个独立的投影平衡方程进行解算。
桁架计算中的截面法与其他结构计算的截面法原理相同。
截面法截取的隔离体上的各力(包括荷载、反力和杆件轴力)通常组成一个平面任意力系,因此只要未知力不多于三个,就可直接由三个平衡方程求出各未知力。
截面法中的平衡方程可以是力矩方程,也可以是投影方程。
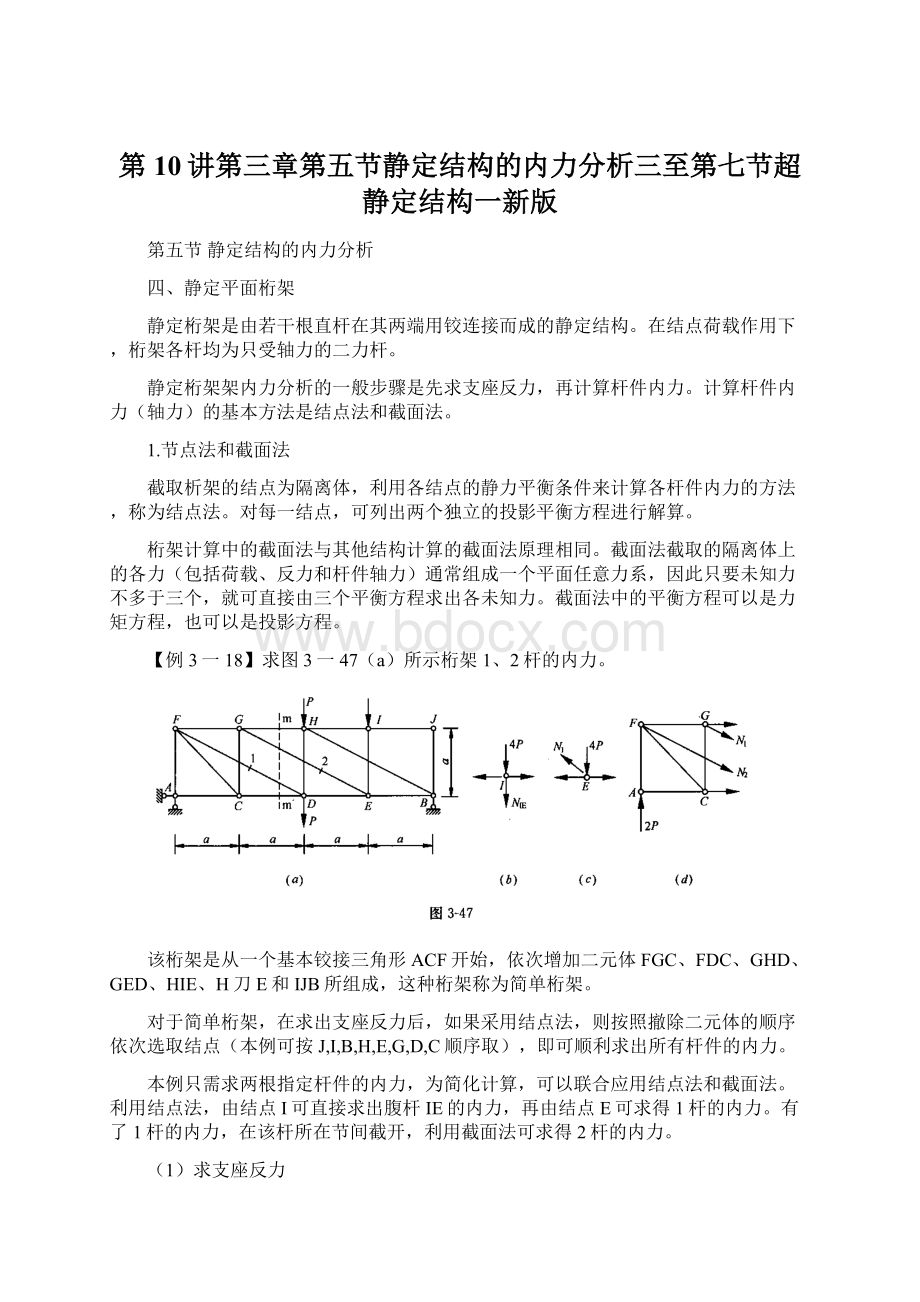
【例3一18】求图3一47(a)所示桁架1、2杆的内力。
该桁架是从一个基本铰接三角形ACF开始,依次增加二元体FGC、FDC、GHD、GED、HIE、H刀E和IJB所组成,这种桁架称为简单桁架。
对于简单桁架,在求出支座反力后,如果采用结点法,则按照撤除二元体的顺序依次选取结点(本例可按J,I,B,H,E,G,D,C顺序取),即可顺利求出所有杆件的内力。
本例只需求两根指定杆件的内力,为简化计算,可以联合应用结点法和截面法。
利用结点法,由结点I可直接求出腹杆IE的内力,再由结点E可求得1杆的内力。
有了1杆的内力,在该杆所在节间截开,利用截面法可求得2杆的内力。
(1)求支座反力
由整体结构的∑MA=0和∑MB=0,可得
由∑Y=0校核计算无误。
(2)求1杆内力
取出结点I(图3-47b),根据∑Y=0,有
再取结点E(图3-47c),由∑Y=0得
(3)求2杆内力
作截面m-m,并取左半部分为隔离体(图3-47d),根据∑Y=0。
有
结点法和截面法是析架内力计算的通用方法。
它们不仅适用于简单桁架,也适用于几何构造更复杂的桁架。
例如图3-48所示的桁架,它由两个简单桁架通过一个铰和一根链杆组成。
这种由几个简单桁架按照几何不变体系的基本组成规则形成的桁架,称为联合桁架。
计算联合桁架时,一般.宜先用截面法将连接简单朽架之间的杆件的内力求出,再用结点法或截面法计算各简单桁架的内力。
对于图3-48的桁架,求得支座反力后,可先用截面法(截面m-m)求出杆件DE的内力,再进一步对左右两个简单桁架进行分析。
2.结点平衡的特殊情况——零杆的判断
(1)L形结点(图3-49a):
成L形汇交的两杆结点上若无荷载作用,则这两杆皆为零杆。
(2)T形结点(图3-49b):
成T形汇交的三杆结点上若无荷载作用,则非共线的一杆必为零杆,而共线的两杆内力相等且正负号相同(同为拉力或压力)。
(3)X形结点(图3-49c):
成X形汇交的四杆结点上若无荷载作用,则彼此共线的两杆内力相等且正负号相同(同为拉力或压力)。
(4)K形结点(图3-49d):
成K形汇交的四杆结点上若无荷载作用,则非共线的两杆内力相等且正负号相反(一杆为拉力而另一杆为压力)。
【例3-19】判断图3-50(a)、(b)所示析架中的零杆。
【解】(l)图(a)结构
先考察结点C,D,E,I,K,L。
这些结点均为T形结点,且没有荷载作用,故杆件CG,DJ,EH,IG,KH,LF均为零杆。
再考察结点G和H。
由于交于这两个结点上的两竖向链杆均已判断为零杆,故这两个结点的受力也已成为T形结点的情形,由于没有荷载作用,故杆件AG,BH也为零杆。
整个结构共有8根零杆,如图3-50(c)虚线所示。
(2)图(b)结构先考察结点D。
该结点为K形结点且无荷载作用,故杆件DE和DF的轴力应大小相等,正负号相反,即:
另一方面,注意到该结构为对称结构(因支座A处水平链杆不受力),且作用有对称荷载,因此结构的内力必然是对称的。
具体到杆件DE和DF,应有
于是必有NDE=NDF=0,即杆件DE、DF为零杆。
再考察结点、E和F,由于DE、DF已判断为零杆,故杆件AE、BF也是零杆。
最后考察结点A和B,因A处水平支座链杆不受力,因此结点A、B均成为L形结点,杆件AG、BH均为零杆。
这样,整个结构共有6根零杆(不包括支座链杆),如图3-50(d)虚线所示(实际上,结点A、B处的三根支座链杆也为零杆)。
3.截面法的特殊情况
在某些特殊情况下,虽然截面法所截取的杆件多于三根,但只要这些杆件中,除一根以外,其余各杆均交于一点或全平行,则那根与其他杆件不交于一点或不平行的杆件的内力,仍可由力矩法(取其余各杆的交点为矩心)或投影法(取垂直于其余各平行杆的轴为投影轴)直接求得。
例如图3-51(a)和(b)中的杆a就属于这种特殊情况。
五、静定组合结构
组合结构是由链杆(即析架杆)和梁式杆混合组成的结构(图3-52)。
静定组合结构内力分析的一般步骤是先求支座反力,再计算各链杆轴力,最后分析各梁式杆的内力。
例如图3-52所示组合结构,其支座反力的计算方法与单跨静定梁完全相同。
反力求得后,可先在中间链杆DE和中间铰C处切开,根据左(或右)半部分对中间铰的力矩平衡求出DE杆的轴力,然后计算其他链杆的轴力,最后对梁式杆AC和CB进行分析。
与同跨度的简支梁相比,由于链杆对梁式杆的加劲作用,使得组合结构中梁式杆的弯矩分布趋于均匀,弯矩数值趋于减小,从而改善了结构的受力状况。
六、静定结构的特性
从几何构造方面看,静定结构是没有多余约束的几何不变体系。
从静力学方面看,静定结构的全部内力和反力均可由静力平衡条件完全确定,且解答惟一,这是静定结构的基本静力特性,由此可派生出其他几个特性:
(1)零荷载零内力特性。
由于零解肯定是零荷载情况的解,而根据解答的惟一性,该解又是惟一解。
因此,除荷载以外,其他任何外因,如温度改变、支座位移、材料收缩、制造误差等均不对静定结构引起反力和内力。
(2)局部平衡特性。
静定结构受平衡力系作用时,其影响范围只限于该力系所作用的最小几何不变部分,在此范围之外不受影响。
(3)荷载等效特性。
当静定结构的一个内部几何不变部分上的荷载在该部分范围内作静力等效变换时,其影响范围只限于该部分之上,对其余部分没有影响。
(4)静定杆件结构的反力和内力只与荷载以及结构的整体形状和尺寸有关,而与构件的材料以及截面形状、尺寸无关。
第六节静定结构的位移
结构在荷载或其他一些因素(如温度改变、支座移动、材料收缩、制造误差等)的作用下会产生变形和位移。
(1)支座位移引起的位移
静定结构发生支座位移(平动或转动)不会引起内力和变形,结构只产生刚体位移。
例如图3-53所示三铰刚架,支座B发生了水平位移d,AC部分将绕A点发生刚体平移,同时绕B点进行刚体转动,从而得到虚线位置。
(2)荷载作用引起的位移
对于梁和刚架结构,在荷载作用下,杆件的剪切变形和轴向变形对位移的贡献一般较小,常可以忽略。
因此,荷载作用下梁和刚架的位移主要由弯曲变形引起,位移的大小一般与杆件弯矩值及结构跨度成正比,与杆件的抗弯刚度成反比。
例如简支梁在竖向荷载作用下的跨中挠度,一般要比相同截面和跨度的三铰拱的跨中挠度大。
这是因为三铰拱在相同荷载作用下的弯矩要比简支梁小,而且分布也更均匀(一般既有正弯矩又有负弯矩,参见图3一45),拱截面虽然还承受较大的轴力,但轴向变形引起的挠度一般比较小。
第七节超静定结构
一、超静定次数
超静定结构是具有多余约束的几何不变体系。
超静定结构中多余约束(或多余未知力)的数目称为超静定次数。
由于存在多余约束,超静定结构的反力和内力单靠静力平衡条件不能完全确定,须同时考虑变形协调条件(即位移条件)。
超静定次数也是超静定结构计算中除静力平衡方程以外,尚需补充的反映位移条件的方程的数目。
确定结构超静定次数的方法是,去掉结构中的多余约束,使之成为一个静定结构,则所去掉的约束的数目就是超静定次数。
在超静定结构上去掉多余约束的方法,通常有以下几种:
(l)切断一根链杆,或撤去一根支座链杆,相对于去掉一个约束(图3一57);
(2)撤去一个单铰,或撤去一个固定铰支座,相对于去掉两个约束(图3-58);
(3)切断一根梁式杆或一个刚结点,或撤去一个固定支座,相对于去掉三个约束(图3-59);
(4)将刚接改为单铰连接,或将固定支座改为固定铰支座,相对于去掉一个约束(图3-60)。
同一个超静定结构可以按照不同的方式去掉多余约束,从而得到不同的静定结构,但是多余约束的数目,即超静定次数是惟一的。
二、力法计算超静定结构
力法计算超静定结构的一般步骤为:
(1)确定超静定次数(多余约束数)n,即为基本未知量的数目。
(2)去掉多余约束,得到一个静定的基本结构,并以多余未知力代替相应的多余约束。
(3)根据基本结构在多余力和原有荷载共同作用下,多余力作用点沿其作用方向的位移与原结构相应位移相等的条件,建立n个关于多余未知力的方程,即力法典型方程如下:
式中,系数δij表示基本结构在第j个单位多余未知力
单独作用下所引起的Xi方向的位移;自由项ΔiP,表示基本结构在外荷载单独作用下所引起的Xi方向的位移.
(4)作出基本结构在各单位多余未知力(
)和原有荷载单独作用下的内力图:
及Mp图。
(5)按照静定结构求位移的方法计算典型方程的各系数和自由项。
(6)解典型方程,求出多余未知力。
(7)叠加法计算结构的最后内力,作出内力图。
例如对弯矩使用叠加法,则有:
【例3-23】计算图3-61(a)所示单跨超静定梁,并作内力图。
杆件EI=常数。
(1)结构为一次超静定。
去掉B处支座链杆,代之以基本未知力X1,得到基本结构如图3-61(b)所示。
(2)力法典型方程为
(3)作出基本结构在
及荷载单独作用下的弯矩
图和Mp图,如图3-61(c)、(d)所示。
(4)利用图乘法求出系数和自由项如下:
(5)由典型方程解得:
(6)利用叠加法求出A、C截面的弯矩为:
作出最后弯矩图如图3-61(e),剪力图如图3-61(f)所示。
.
A端弯矩求得后,梁的弯矩图也可根据分段叠加法作出,即先将A端和B端的弯矩连成虚线,再在虚线基础上叠加简支梁跨中作用荷载尸时的弯矩图。
该计算结果可以与上面的结果相互校核。
 升级会员
升级会员 