10T电控振动桩锤翻译完成.docx
《10T电控振动桩锤翻译完成.docx》由会员分享,可在线阅读,更多相关《10T电控振动桩锤翻译完成.docx(15页珍藏版)》请在冰豆网上搜索。
10T电控振动桩锤翻译完成
振动式和冲击式振动桩柱驱动设备
Don.C.Warrington,VulcanIronWorksInc.
简介:
振动式桩锤已经成为大量类型桩柱安装时的一个重要工具,但是很多人不了解它们怎样工作,也不知道我们可以从中期待怎样的结果。
什么是一个振动驱动桩柱的承载能力?
振动时不同的土壤会有什么形式的反应?
当你使用冲击式振动桩锤对系统进行冲击时又会发生什么?
所有这些及其他的一些问题都是许多国家正在进行研究的课题。
但是,一旦这些问题被解决了,它就需要被传播到那些也没有充足努力的地方,不管是因为缺少资源还是对保护商业机密的需要。
开始时的技术资料就是振动性设备和冲击式振动设备之间的一个区别。
此篇文章中提到的振动性桩柱驱动设备,其驱动力是从一个交变的正弦驱动力中产生的,而不受从激励器所带来的冲击,该冲击式振动激励器同时有正弦式驱动力和激励器内部的冲击。
这些机械设备将在后面得到更加详细的解释。
第1章历史发展
§1冲击式振动桩锤的发展
“冲击式振动桩锤”是指振动性桩柱驱动器的一种形式,该驱动器在运行时同时给予桩柱振动和冲击。
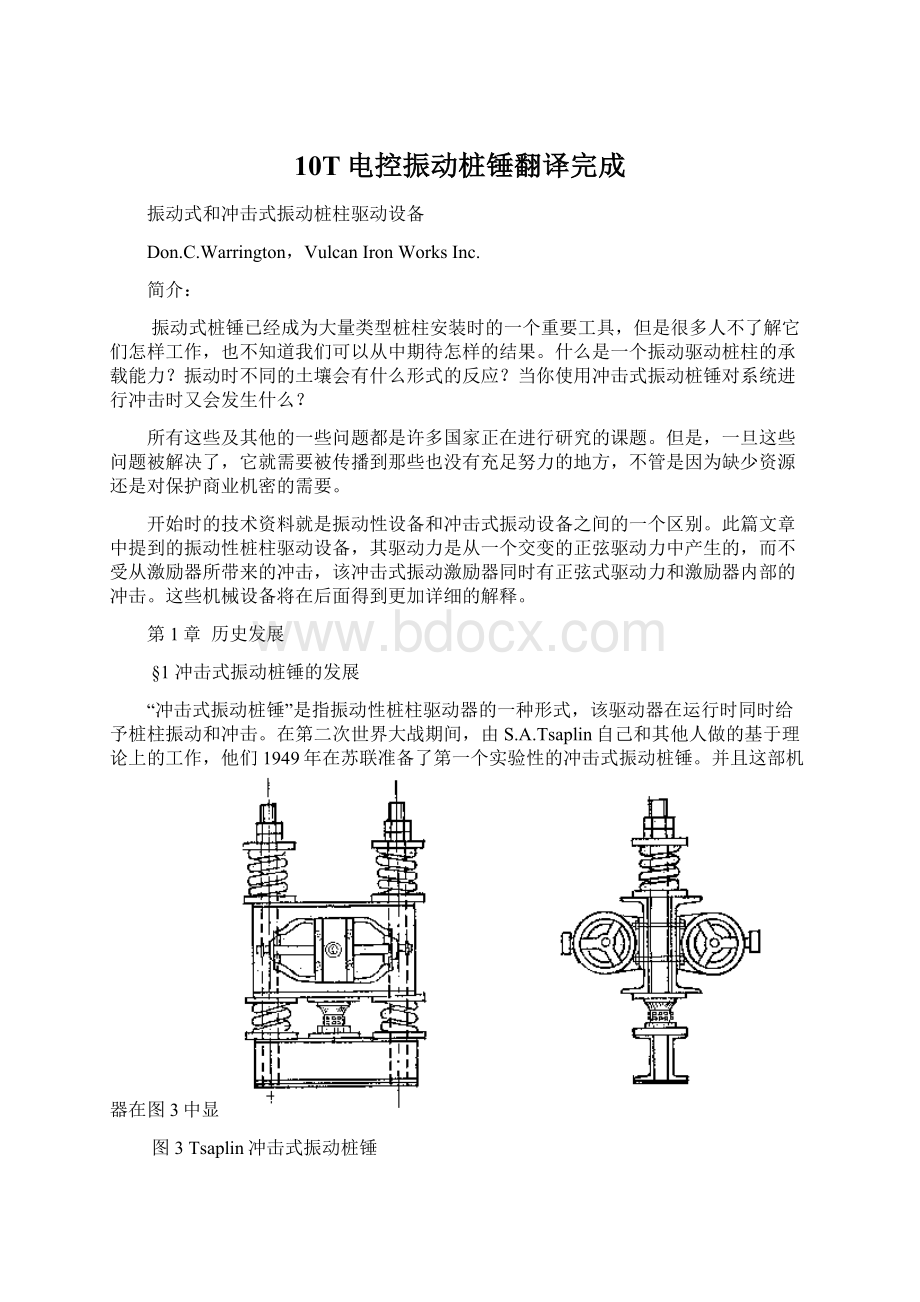
在第二次世界大战期间,由S.A.Tsaplin自己和其他人做的基于理论上的工作,他们1949年在苏联准备了第一个实验性的冲击式振动桩锤。
并且这部机器在图3中显
图3Tsaplin冲击式振动桩锤
示出来。
在实地中进行测试时,先将冲击式振动桩锤焊接在直径为110mm,壁厚8mm,长2.6m,质量为200kg的金属管顶端。
然后用桩锤将这根金属管打入各种沙土地、沙地和粘土地中。
在此我们可以看出冲击式振动模式驱动和振动模式驱动的区别,后者是通过一整个完整的弹簧块完成的。
这项测试证实了,在考虑最大可能的推进深度和桩柱的下沉速率时,冲击式振动驱动的效率实际上是比较高的,并且推进效率是随着振动激励器的振动幅度的增加而增加的。
冲击式振动桩锤的第一次大范围实际应用是在建造斯大林格勒(现在的伏尔加格勒)电厂时。
在建“拉尔森—5”障碍的反滤波墙时,桩柱在最后一个场地中等硬度的砂岩地中被推进到了13m深的位置。
在此处及其它工作地点,冲击式振动桩锤可在舷外加上传统的振动桩锤、气力/蒸汽锤和内燃机驱动锤。
第2章在此处及其它工作地点以及实验室中的成功使冲击式振动桩锤得到了广泛使用,其范围不仅限于俄罗斯,而且涉及其他国家,特别是在欧联体一些国家中,一些制造商比如Menck和PTC已经开始生产这些产品。
但如今在美国并无冲击式振动桩锤的生产。
第3章设备的制造和操作
冲击式振动激励器
尽管冲击式振动桩锤和其他振动性设备具有共同的结构特征,但是
它们仍然有很重要的
区别。
机器中的这种
变型可以从图6中看
到。
和很多传统的振
动性桩锤一样,它包
含提供垂直方向振动
的相对旋转的偏心机
构。
然而,它们并不
是以与桩柱牢固相连
的方式包含在顶部,而是具有一定程度上的自由度。
这个自由度使得这个单元以一定的高于传统冲击桩柱的速率去冲击桩柱。
偏心机构提供交变的驱动力代替空气、蒸汽、内燃机燃烧或是液压流体来驱动顶部像一个柱塞一样上下运动,并且在顶部、底部或是在“冲程”的两端给予冲击。
尽管这可以在偏心机构的旋转速度提高到40%(和5%相对比或是对振动性桩锤很正常)时产生变体,这种变体一般不会妨碍设备的连续稳定操作。
这些桩锤各部位的一些零部件将在以下讨论:
激励器/顶部:
这些机器的激励器在一般原理上是和严格意义上的带有发动机驱动偏心机构的振动机器相似的。
有了冲击式振动桩锤,激励器在弹簧内部就有了一个持续的振动源,因此偏心机构通常并不与传动装置保持同步,每一个偏心机构都由一个发动机来驱动。
这些机器的轴承寿命是很关键的,并且它们中很多都必须在大量操作的振动模式下使用。
框架和弹簧:
由于框架能够同时控制机器并与桩柱相连,因此这些机器的结构设计是很重要的。
这些调节弹簧通常是螺旋弹簧。
弹簧内的机械振动是通过弹簧刚度和弹簧的预压缩来调节的。
后者可以通过液压或是电力方法修理或调节机器。
如果框架是紧连在桩柱上的,那么桩柱上零件的机械力也是通过弹簧来传递的。
桩柱联接方式:
最基本的冲击式振动机器是完全没有桩柱联接方式(或结构)的,并且如冲击式桩锤一样位于顶部。
尽管可以使用同以前一些用于振动性桩锤中的夹钳相似的液压夹钳,但是其它保证框架固定于桩柱上的设计还包括简单地使框架重于上部的弹簧力或者将机器用螺栓连接到桩柱上。
§5振动性动力单元和冲击式振动设备
说起动力单元,一些振动器,比如Bodine—Guild协会的共振驱动器,早期苏维埃的一些振动钻井机器和一些日本的构件,都是通过机械离合器直接由内燃机或汽油机驱动偏心机构。
但是,很多振动性的或是冲击式振动的桩锤是从主要的发动机通过电力或是液压系统传递能量给偏心机构。
由于施工地点通常很远,已经为振动性桩锤研制了便携式的动力源。
这些就是提到的动力单元(针对液压单元)或是发电机装置(针对电力单元)。
这些单元对于振动性和冲击式振动性设备来说都是相似的。
电力系统:
这些通常使用三相感应式发动机在一个单一频率驱动,这个单一频率已经促进了很多系统的发展,从而使偏心力矩以至驱动力都变得多样化。
在很多情况下,电力振动桩锤可以由附近的一个三相电源驱动,从而不再需要发电机装置。
因此,要控制桩锤,仅需要一个配电箱。
操作液压夹钳,则需要一个单独的、小的、电力驱动的动力单元,如果有的话。
这个动力单元可以放在地上,也可以安装在静态配重上。
从维修和可靠性方面考虑,电力系统受到的欢迎度越来越小。
液压系统:
由于一系列原因,液压系统已经变得很有优势,并且一些主要的制造商,比如Vulcan,ICE和MKT,几乎都是只使用液压驱动。
这些系统使用内燃机发动机来驱动液压泵,该液压泵反过来又来驱动激励器上的发动机。
使用不同尺寸的容器来储存液压流体以补充因泄漏而损失的液体,同时辅助冷却这些流体。
在启动和关闭机器以及操作过程中使用一个控制阀系统来控制流体的流动。
除这些基本点以外,在多种多样的可用液压动力单元间也有一些特殊的区别,它们是:
1)泵传动和/或齿轮箱传动:
液压泵是通过一个泵传动与发动机连结在一起的;有时这个泵传动也是一个齿轮箱,充当速度变换器的角色对这个泵加以完善,然而在其它的设备中会使用一个直接传动从而消除齿轮损耗。
2)夹紧泵:
一些单元对液压夹钳来说有单独的泵,一些就会把它们整合成为主要的动力源。
不包含夹钳的冲击式振动桩锤上则不需要夹紧回路。
3)频率和力的变化:
二者都可以通过在动力单元中使用不同排量的泵或是简单改变发动机速率来得到改变。
不同排量的泵有很复杂的流体控制机制。
4)控制方式:
对液压回路,这些单元可以使用气力、电力或人力控制。
人力控制是最简单的。
然而,它们会限制装置操作员在动力单元的位置,这个位置会取决于能见度和其它要素,也许就不会是操作机器的最合适位置。
远程控制会使操作员更具有灵活性,然而会对机器造成额外费用,形成干扰源。
5)附件:
一些动力单元有一个片状金属附件而一些却没有。
一个封闭的动力单元的主要优点是保护它免受天气和犯罪活动的影响。
如果附件能够对声音进行阻隔,也是很有用的,尽管很多不能。
开式的动力单元更加经济合算并且对一些零部件的维修也更加方便。
6)开环和闭环液压系统:
在应用中二者都可以出现在动力单元上。
闭环系统对机器的启动、运行和停止能有更好的操控性。
但是一般说来它也更加复杂,并且该动力单元对其它应用适应性不强。
在一些情况下,起重机的液压系统可以用来作为振动桩锤的动力。
尽管这消除了外部的动力单元和内燃机发动机,但是这些整体动力单元的所有控制和操控特点是一样的。
第五章振动性和冲击式振动驱动的机制
§13冲击式振动机器的驱动机制
冲击式振动桩锤并不能像冲击式或振动式桩锤那样精确的打击桩柱,但在实际中它却是上述二者的混合。
对此验证的最好方法就是观察它和纯振动式驱动的关系。
如上所述,当轴踵的阻力很高时,振动式驱动的效率是最低的。
在这些情况下,冲击式振动桩锤的效率则更高,因为它们可以形成很高的峰值力来突破这些限制,就如一个高振幅高速率的振动桩锤可以做的那样。
正因如此,冲击式振动桩锤才更广泛地应用于混凝土桩柱上。
它们可以传递需要的驱动力来克服很高的轴踵阻力。
关于冲击式桩锤,它们与振动式桩锤相比每次打击传递的冲击能量较低和打击次数较多。
若在一些土壤中弹性压缩不是主要问题,那就可以产生可比较的结果。
冲击式振动桩锤通过弹簧产生一些驱动力。
一般来说,在冲击式振动驱动中,特别是当该结构是通过自重加载固定在桩柱上时,这些不是主要因素。
在这种情况下,没有交变应力传递给桩柱。
如果允许激振器能在它的行程的顶部和底部同时给与打击,冲击式振动机器是可能有双向力的,并且这同时对打入和取出有帮助。
第六章振动性和冲击式振动的结构和驱动性能的数学描述
§14振动性结构的基本要素
一个振动式桩柱驱动器是一个通过使用作用在桩柱上的快速
m交变应力将桩柱安装
进土地中的机器。
这
FdynrFdyn通常是通过轴附近
中间轴的偏重块来完成的。
图11振动性偏心装置每一个旋转的偏心装置产生一个作用于单独平面上的力并且直接指向轴的中心线。
图11显示了现在使用的大部分振动性桩柱打入/取出装备的旋转偏心块的基本装置。
该重块是通过偏心矩由旋转轴线的中心来分开平衡的。
一般来说,对振动性桩锤很多传统上的可测量的工程量,像振幅、加速度等是“自由悬挂式”情况下计算的,也就是只考虑系统的质量而不考虑土壤抗力。
对于大多数的传统振动性桩锤,我们都可以将整个系统看作一个刚性的质量。
这是因为大部分振动性桩锤的相对较低的振动频率并不会将系统分散的质量和弹力带进去。
按照定义,利用音波桩柱驱动器,系统的共振性能变得十分重要,并且分析变得更复杂。
如图所示,该重块在中心轴附近以角速度ω旋转,ω由下面的等式给出:
ω=2πθ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
(1)
在这,ω=旋转的角速度,rad/sec
θ=振动频率,Hz=(偏心装置RPM)/60
对一个旋转主体,施加于中心轴上的力由下面的公式给出:
Fdyn=mrω2/1000‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
(2)
在这,Fdyn=偏心装置的动态力,kN
m=偏心装置的质量,kg
r=偏心装置的力臂,m
如果我们定义
K=m•r‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(3)
在这,K=偏心装置的力矩,kg•m
我们可以代换成:
Fdyn=K•ω2/1000‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(4)
如果仅使用一个偏心装置,在一个循环中将会施加一个各个方向的力,从而给该系统很多侧向打击。
为了避免这个问题,偏心装置是成对的,所以侧向力将会互相抵消,对桩柱只是留下轴向力。
机器也可以有几对更小的完全相同的同步偏心装置,这可以得到和一对较大的偏心装置相同的作用。
因此,术语“m”表示所有偏心重块的总和,对所有的偏心装置力臂长是相同的。
不考虑重力的影响,运动方程是:
x''=1000•Fdyn•sin(ω•t)/M‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(5)
在这,x''=系统的瞬时加速度,m/sec2
这个方程式的解决方式是:
x=K•sin(ωt)/M‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(6)
在这,x=系统位移,m
在对等式(5)的整合过程中,我们可以导出三个非常重要的工程量。
第一个是加速比,或在一个振动周期中最高加速度比;它是
n=Fdyn/Wdyn‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(7)
在这,n,n1,n2=系统的最大加速度与由重力引起的加速度比,g's
Wdyn=系统的振动重力,kN=g•M/1000
g=重力加速度=9.8m/sec2
第二个是速度的最大值,就是
Vdyn=gn/ω‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(8)
在这,Vdyn=在一个周期中的最大动态速度,m/sec
这些工程量很重要,因为传递给土壤的功率必须用一个有效的方式来完成。
即在土壤中从一个高能量源通过桩土表面到一个低能量源。
由于振动性取出是动态的,它必须通过这些工程量来完成。
从1.5到9的n的极小值已经确定,但是在这上面并不是一致的。
最后,最大位移是
xmax=K/M‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(9)
在这,xmax=系统的最大位移(0到最大值),m
因为由等式(5)中解决出的加速度、速度和位移是关于时间的正弦曲线,这些工程量是从正弦波的0度线测量的。
通常的,振动器的最大周期性位移,叫做振幅,是从峰值到峰值来测量的,并且可以描述为:
A=2xmax‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(10)
在这,A=系统振幅(峰值到峰值),m
驱动偏心装置的瞬时转矩为
Tinst=(Fdyn/ω)2•sin(2ωt)/(2•M)‐‐‐‐‐‐‐‐‐‐‐‐‐‐(11)
在这,T,Tinst,Tmax,Trms=发动机转矩,kJ
最大的瞬时转矩为
Tmax=(Fdyn/ω)2/(2•M)‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(12)
需要的工作电压,通常上我们将会使用一个均方根(rms)值来和一个发动机的使用相匹配,所以
Trms=Tmax/√2‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(13)
从转矩中功率可以很简单的计算出来,由以下给出
N=ω•Trms‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(14)
在这,N=发动机功率,kW
足够的功率对成功的振动驱动是必要的,因为在其他原因中,没有适当的功率是不可能保持振动频率的。
一个动力不足的机器将会降低从而减少它自己的驱动性能。
从另一方面讲,过大的功率又是无意义的,因为系统将不会再使用任何超过它所需要的功率。
这是了解振动系统最难的事情之一。
这个问题由贡恰列维奇和弗洛罗夫(1985)最简洁的描述出来:
在给定的状态下操作振动性机器所需要
的功率和由一个特定形式的振动器传递的功
率是由一系列的复杂因素决定的:
振动器的
参数,机器的特征和机器中的作用载荷。
仅
仅靠增加发动机的输出来给予额外的功率给
振动性机器是不可能的。
每个振动性机器
都严格地消耗确定的功率,这个值是依靠
一系列作用于振动性机器振动激振载荷
系统的因素决定的。
在影响功率需求的诸多因素之中,机器操作员最能控制的就是作用于系统的静态力,不管是用偏置重力,驱动中的下部聚集力,还是拉拔中额外的起吊力。
§15操控灵活性的基本要素和对振动性桩锤的能力预估
振动性机器驱动桩柱的能力已经很好地被证实了;然而,影响这些机器广泛使用的一个主要障碍是缺少一个公认的将一个桩锤/桩柱/土地系统的驱动性能与击打泥土的阻力或桩柱的静态能力联系起来的方法。
这一章将要讨论过去的一些比较成熟的决定振动性桩锤的可操作性和被动桩柱的基本承载能力的方法。
以下提供的方法最远可追溯到振动性技术的最早应用,最近可见于现在的桩柱驱动;他们采取多种方法并且将会给出多种结果。
为了方便,我们将会把这些方法分成四组:
1)参数化方法:
依靠几种标准来测验确定的特征量来决定可操作性。
2)能量方法:
可操作性是依靠流过系统的能量并和其他因素一起考虑来决定的。
3)来自实验室的方法和模型测试:
这些方法是通过整理实验室环境下的测试进而加以统计得出的,通常是通过土壤箱驱动桩柱。
4)与时间有关的非线性方法:
这些方法试图将数字的整合技术应用到振动系统运动方程式(5)的直接解答中。
它们包括在冲击式桩锤中流行的波形方程式技术。
此时此刻一个重要的经验就是:
一般地,振动性的桩柱相对于冲击式驱动桩柱承载力较低。
这是因为冲击式驱动在轴踵处造生土壤的压缩而振动性驱动不会。
下面的大部分公式是从它们的原公式中推导出来的;然而,当需要时它们会改变成一个统一的单位(SI)和符号系统。
§16参数化方法
Tünker动态力学方法:
基本上,这个方法使用这个公式:
Fdyn≧s•As‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(15)
在这,s=单位土壤的轴向阻力,kPa
As=土壤的轴端面积,m2
因素r的值在表1中给出。
这个公式只在xmax≧2.38mm时可用。
为了计算片状桩柱的轴端面积,这个方法使用下面的计算式:
As=2.8•l•dinter‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(16)
在这,l=桩柱长度,m
dinter=片状桩柱的宽度,m(从联销到联销)
表1
Tünker方法的б值
SPT值,打击次数/30
cm
土壤阻力kPa
无粘着力土壤
粘着力土壤
б
0-5
0-2
9.86
5-10
2-5
11.87
10-20
5-10
12.83
20-30
10-20
14.84
30-40
20-30
15.80
40+
30+
16.76
贝它方法:
一个给定的振动性桩锤对驱动一个给定的桩柱是合适的,当:
Fdyn+Wdyn+Wst≧βo•Rso+βi•Rsi+βt•Rt‐‐‐‐‐‐‐‐(17)
在这,Wst=系统的非振动性重力,kN
β=土壤阻力的贝它因数(一般地)
βi=土壤阻力的贝它因数(外部的杆)
βo=土壤阻力的贝它因数(内部的杆)
βt=土壤阻力的贝它因数(轴踵)
Rsi=内部桩柱杆的土壤阻力,kN
Rso=外部桩柱杆的土壤阻力,kN
Rt=桩柱轴踵的土壤阻力,kN
β的建议值在表2中给出,对取出时,该公式可以变成这样来理解:
Fdyn+Fext-Wdyn-Wst≧βo•Rso+βi•Rsi+βt•Rt‐‐‐‐‐‐‐‐‐(18)
在这,Fext=起重机的拔出力,kN
表2
贝它方法βn的值
土壤类型
β
粗糙的圆粒状沙地
0.10
松软的壤土/泥灰土,松软的黄土,坚硬的崖壁
0.12
中等硬度圆粒状沙地,圆粒状碎石
0.15
细小的有角碎石,坚硬的壤土,坚硬的黄土
0.18
细小的圆粒状沙地
0.20
坚硬的沙地,粗糙的碎石
0.25
坚硬的/干的细小沙地
0.35
泥灰土,坚硬的/非常坚硬的粘土
0.40
在这,n=i,o,或t是由问题中桩柱和
土壤的相对位置决定的。
萨维诺夫和拉斯金方法:
这个方法是在俄罗斯由两个在振动性桩柱驱动设备的发展中起到先锋作用的人发展而来的。
下面提出的是一个为简化和清晰化而做的再形成的版本。
其步骤如下:
1)所需最小动态重力的计算:
为了保证桩柱下沉充足的重力,系统的最小动态重力可由以下公式计算
Wdyn≧po•At‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(19)
在这,At=桩柱的轴踵面积,m2
po=系统的轴踵压力,kPa(在表3中给出的)
表3
萨维诺夫和拉斯金方法的桩柱轴踵
重力压力值(对饱和的沙性和松散
的粘性土壤)
桩柱类型
压力,kPa
小直径钢管和其他桩柱
w/At﹤150cm2
150‐300
端部封闭的管状桩柱,At﹤800cm2
400‐500
正方形和矩形的强化的混凝土桩柱,At﹤2000cm2
600‐800
尽管这个方法需以上计算的重力为动态数值,但这个重力也可能局部是静态的。
2)土壤抗力的测定:
为了振动的目的,土壤的抗力可以由下面的公式测定出:
∫i=k
Fcr=⎜Z•∑si•li‐‐‐‐‐‐‐‐‐‐(普通的桩柱‐‐20a)
⎠i=1
∫i=k
Fcr=⎜∑si•li‐‐‐‐‐‐‐‐‐‐(片状桩柱‐‐20b)
⎠i=1
在这,Fcr=驱动的临界力,kN
Z=桩柱周长,m
si=土壤因素的轴向阻力,kPa或kN/m
li=桩柱因素的长度,m
桩柱的长度首先被分成长度为li的片段,然后每个段取决于在给定段的土壤类型的土壤阻力可以从表4中得到。
表4
萨维诺夫和拉斯金方法的土壤抗力
土壤和桩柱类型
σ
柱状kPa
片状kN/m
1)饱和的沙性和粘塑性土壤
钢管
6
强化的混凝土桩柱
7
端部开式的管状桩柱
5
片状桩柱,轻型的(大型的)型材
12(14)
2)和
(1)相同,但是有夹层的紧密的粘性或多碎石的土壤
钢管
8
强化的混凝土桩柱
10
端部开式的管状桩柱
7
片状桩柱,轻型的(大型的)型材
17(20)
3)坚硬的可塑性粘性土壤
钢管
15
强化的混凝土桩柱
18
端部开式的管状桩柱
10
片状桩柱,轻型的(大型的)型材
20(25)
4)半硬质的和硬质的粘性土壤
钢管
25
强化的混凝土桩柱
30
端部开式的管状桩柱
20
片状桩柱,轻型的(大型的)型材
40(50)
2)偏心装置动态力的计算:
首先计算的动态力满足以下两个标准:
a)土壤阻力因素:
动态力必须比土壤阻力要大,正像下面公式表达的:
Fdyn≧χ•Fcr÷Ψ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(21)
在这,Ψ=桩柱因子(混凝土桩柱为0.8,其他桩柱为1)
χ=土壤抗力系数(振动频率在5~10Hz时在0.6~0.8之间,其他频率时为1)
b)系统加速度因素:
周期加速度的峰值必须落在以下两个值之间:
n1≦Fdyn÷Wdyn≦n2‐‐‐‐‐‐‐‐‐‐‐‐‐‐(22)
n1和n2的值在表5中给出
表5
萨维诺夫和拉斯金方法中加速度比n的值
桩柱类型
最小加速度比n1
最大加速度比n2
钢片型桩柱
2.00
6.67
轻的型材桩柱
1.67
3.33
大的型材和管状桩柱
1.00
2.50
为防冲突,此方法似乎赞同等式(22)而不赞同等式(21)。
3)由下面公式计算必须的频率来保证一个最小的振动速度峰值:
ω=1000•Fdyn/(vdyn•M)‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(23)
速度vdyn必须落在0.5~0.8m/sec之间。
4)由下面公式用刚体振动结构计算偏心力矩:
K=1000•Fdyn/ω2‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(24)
5)像表6中所示的靠xmax的推荐值选择适当的振幅,振幅值由下面的公式计算:
xmax=1000•K•Ψ/M‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐(25)
表6
萨维诺夫和拉斯金方法的振幅需求
频率,Hz
5-12Hz
13-17Hz
18-25Hz
土壤和桩柱类型
半振幅,mm
钢片状桩柱,端部开式管状桩柱,
和其他的At<150cm²的桩柱
沙性土壤
8-10
4-6
粘性土壤
10-12
6-8
端部封闭的钢管状桩柱,At<800cm²
沙性土壤
10-12
6-8
粘性土壤
12-15
8-10
强化的混凝土桩柱,正方形
或矩形截面,At<2000cm²
沙性土壤
12-15
粘性土壤
15-20
强化的大直径混凝土圆柱形桩柱
驱动移除的土塞
沙性土壤
6-10
4-6
粘性土壤
8-12
6-10
6)计算驱动发动机的功率:
这可以用下面的公式完成:
N=Kθ3(3.2×10-6D+0.079K/M)‐‐‐‐‐‐‐‐‐‐‐(26)
在这,D=轴承座圈的直径,mm
公式(26)是在下面假设的基础上发展的:
a)从发动机到振动激振器的功率传递效率为90%;
b)轴承中的旋转摩擦系数为0.1%;
c)实际传递给土
 升级会员
升级会员 