卷积码的编码及Viterbi译码论文.docx
《卷积码的编码及Viterbi译码论文.docx》由会员分享,可在线阅读,更多相关《卷积码的编码及Viterbi译码论文.docx(10页珍藏版)》请在冰豆网上搜索。
卷积码的编码及Viterbi译码论文
《信息理论与编码》课程报告
题目______________________________________
姓名______________________________________
学号______________________________________
日期______________________________________
成绩______________________________________
卷积码的编码及Viterbi译码
1、卷积码
卷积码是将k个信息比特编成n个比特,但k和n通常很小,特别适合以串行形式进行传输,时延小。
与分组码不同,卷积码编码后的n个码元不仅与当前段的k个信息有关,还与前面的N-1段信息有关,编码过程中互相关联的码元个数为nN。
卷积码的纠错性能随N的增加而增大,而差错率随N的增加而指数下降。
在编码器复杂性相同的情况下,卷积码的性能优于分组码。
但卷积码没有分组码那样严密的数学分析手段,目前大多是通过计算机进行好码的搜索。
1.1卷积码的结构和描述
一、卷积码的一般结构
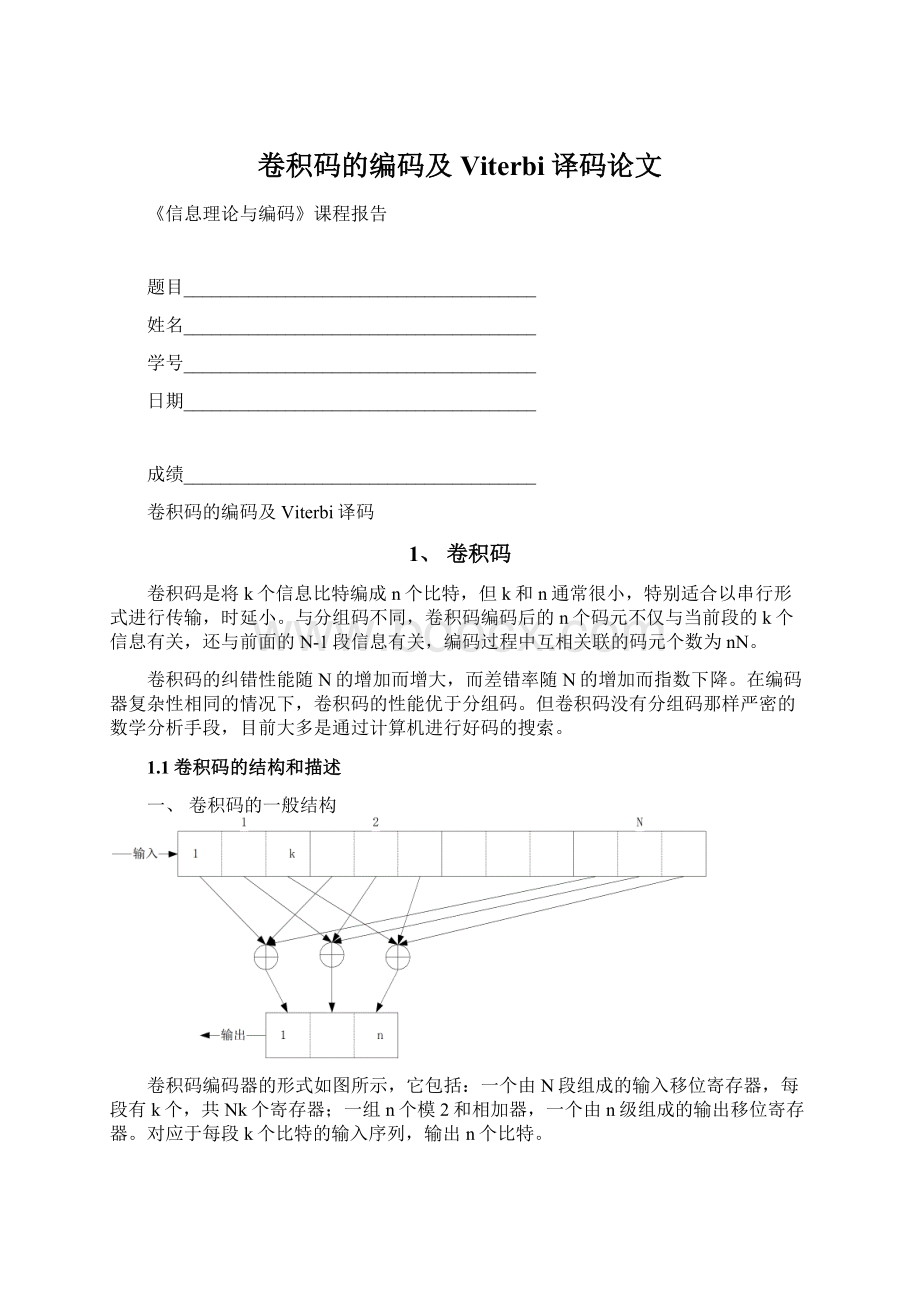
卷积码编码器的形式如图所示,它包括:
一个由N段组成的输入移位寄存器,每段有k个,共Nk个寄存器;一组n个模2和相加器,一个由n级组成的输出移位寄存器。
对应于每段k个比特的输入序列,输出n个比特。
由上图可以看到,n个输出比特不仅与当前的k个输入信息有关,还与前(N-1)k个信息有关。
通常将N称为约束长度,(有的书的约束长度为Nn)。
常把卷积码记为:
(n,k,N),当k=1时,N-1就是寄存器的个数。
二、卷积码的描述
描述卷积码的方法有两类:
图解法和解析表示。
图解法包括:
树图、状态图、网格图
解析法包括:
矩阵形式、生成多项式形式。
以如下的结构说明各种描述方法。
1、树图
根据上图,我们可以得到下表:
M0
1
0
1
0
1
0
1
0
M1m2
00
00
01
01
10
10
11
11
a
a
c
c
b
b
d
d
C1c2
11
00
00
11
01
10
10
01
状态
10
00
10
00
11
01
11
01
b
a
b
a
d
c
d
c
我们可以画出如下的树状图:
2、
状态图
3、网格图
例1,输入为1101110,输出为:
11010100011001
4、生成多项式表示
定义
,
则上述结构为
,
,这里用8进制表示
,
定义
则输入信息
的多项式为
那么我们可以得到输出
最终输出是
的相同次数项的排列。
例,输入为1101110…,
则最后输出为110101000110…
2、Viterbi译码算法
2.1viterbi译码算法简介
viterbi译码算法是一种卷积码的解码算法。
缺点就是随着约束长度的增加算法的复杂度增加很快。
约束长度N为7时要比较的路径就有64条,为8时路径变为128条。
(2<<(N-1))。
所以viterbi译码一般应用在约束长度小于10的场合中。
先说编码(举例约束长度为7):
编码器7个延迟器的状态(0,1)组成了整个编码器的64个状态。
每个状态在编码器输入0或1时,会跳转到另一个之中。
比如110100输入1时,变成101001(其实就是移位寄存器)。
并且输出也是随之而改变的。
这样解码的过程就是逆过程。
算法规定t时刻收到的数据都要进行64次比较,就是64个状态每条路有两条分支(因为输入0或1),同时,跳传到不同的两个状态中去,将两条相应的输出和实际接收到的输出比较,量度值大的抛弃(也就是比较结果相差大的),留下来的就叫做幸存路径,将幸存路径加上上一时刻幸存路径的量度然后保存,这样64条幸存路径就增加了一步。
在译码结束的时候,从64条幸存路径中选出一条量度最小的,反推出这条幸存路径(叫做回溯),得出相应的译码输出。
如下图:
2.2硬判决的维特比算法
以1/2速率的卷积码为例说明卷积码的维特比译码算法。
假设输入
,经过编码后,编码后的输出
经过调制、信道、解调、硬判决后在输出端得到序列
,则由于噪声的影响
。
输入
共有
种组合,即
序列有
种,我们的任务就是从这
种序列中挑出与序列
的距离最小的序列,该序列在卷积码的格形图上形成一条路径,对应该路径的输入信息比特就是我们最终要译码输出的信息。
维特比算法通过比较和筛选的方法使实现的计算复杂度大大降低。
我们知道,在格形图上,每个状态都有若干条路径进入,那么某个时刻会聚在某个状态的路径与接收序列的距离不同,如果选择最小距离的路径保留,其它路径舍弃,则从每个状态出发的路径只有1条。
所以,只需要存储与状态数相等的路径数即可。
大大减小了存储量。
以
,
的卷积码为例说明维特比译码算法。
假设输入为110111100,编码输出为110101000110011100
假设经过调制、信道、解调、硬判决后输出100101100110011100
输入第1比特,有两条路径
进入状态a,aa(距离1),选择aa
(1)
进入状态b,ab(距离1),选择ab
(1)
输入第2比特,有4条路径
进入状态a,aaa(距离2)
进入状态b,aab(距离2)
进入状态c,abc(距离3)
进入状态d,abd(距离1)
2.3软判决的维特比算法
在软判决译码中,路径的距离不是用汉明距离作为比较,而是用欧式距离作为比较,其他的算法与硬判决译码算法没有本质的区别。
与硬判决算法相比,软判决译码算法的路径度量采用“软距离”而不是汉明距离。
最常采用的是欧几里德距离,也就是接收波形与可能的发送波形之间的几何距离。
在采用软距离的情况下,路径度量的值是模拟量,需要经过一些处理以便于相加和比较。
因此,使计算复杂度有所提高。
除了路径度量以外,软判决算法与硬判决算法在结构和过程上完全相同。
一般而言,由于硬判决译码的判决过程损失了信道信息,软判决译码比硬判决译码性能上要好约2dB。
不管采用软判决还是硬判决,由于Viterbi算法是基于序列的译码,其译码错误往往具有突发性。
2.4Viterbi译码C程序如下
#include"main.h"
//微分真值表,第4和第5位用于发送,第0和第0位用于接收
charDiff[]=
{0x00,0x11,0x23,0x32,0x11,0x00,0x32,0x23,0x22,0x33,0x10,0x01,0x33,0x22,0x01,0x10};
//延迟状态发送矩阵,用于回溯当前状态
charTMBackward[8][4]={
0,3,1,2,14
4,7,6,5,15
1,2,0,3,16
5,6,7,4,17
2,1,3,0,18
7,4,5,6,19
3,0,2,1,20
6,5,4,721
};
charTdr,DelayState[16][8],PathState[16][2],DStCurr;
intAccDist[8];
//初始化函数
voidInit()
{
shorti,j;
DStCurr=0;
Tdr=0;
AccDist[0]=0;
for(i=1;i<8;i++)
AccDist[i]=(1<<10)/2;
for(j=0;j<16;j++)
for(i=0;i<8;i++)
DelayState[j][i]=0;
for(j=0;j<16;j++)
for(i=0;i<2;i++)
PathState[j][i]=0;
}
//译码
intViterbi(intXi,intYi,intmodd)
{
shortState[8],Xb,Yb,Nx,Ny,Qx,Qy,Ix,Iy,Id;
shortc,i,j,tmp1,tmp2,tmp3,tmp4,tt,ss,pp;
intDistance[8],dist1,dist0,DataOut,Sht;
Mod*Mcurr;
Mcurr=(Mod*)modd;
Sht=Mcurr->TSht;
//Xi和Yi是输入,首先得到最低距离
for(c=0;c<8;c++)
{
Xb=(Mcurr->TXs[c])<<10;Yb=(Mcurr->TYs[c])<<10;
Nx=Mcurr->TNx[c];Ny=Mcurr->TNy[c];
Qx=(Mcurr->TQx)<<10;Qy=(Mcurr->TQy)<<10;
Iy=Ny;
for(i=0;i{
if(YiYb+=Qy;
}
Ix=Nx;
for(i=0;i{
if(XiXb+=Qx;
}
Id=Iy*(Nx+1)+Ix;
State[c]=*(Mcurr->St[c]+Id);
tmp1=*(Mcurr->Xc[c]+Id);
tmp2=*(Mcurr->Yc[c]+Id);
if(State[c]!
=SS)
{
tmp3=Xi-(tmp1<<10);
tmp4=Yi-(tmp2<<10);
Distance[c]=(int)tmp3*(int)tmp3+(int)tmp4*(int)tmp4;
}
else
{
tmp3=Xi-(*(Mcurr->Xc[c]+tmp1)<<10);
tmp4=Yi-(*(Mcurr->Yc[c]+tmp1)<<10);
dist1=(int)tmp3*(int)tmp3+(int)tmp4*(int)tmp4;
tmp3=Xi-(*(Mcurr->Xc[c]+tmp2)<<10);
tmp4=Yi-(*(Mcurr->Yc[c]+tmp2)<<10);
Distance[c]=(int)tmp3*(int)tmp3+(int)tmp4*(int)tmp4;
State[c]=*(Mcurr->St[c]+tmp2);
if(dist1{
Distance[c]=dist1;
State[c]=*(Mcurr->St[c]+tmp1);
}
}
}
//在路径状态0~7中寻找最短距离
dist0=0x7FFFFFFF;
for(c=0;c<4;c++)
{
if(Distance[c]{
dist0=Distance[c];
Id=c;
}
}
DelayState[DStCurr][0]=TMBackward[0][Id];
DelayState[DStCurr][2]=TMBackward[2][Id];
DelayState[DStCurr][4]=TMBackward[4][Id];
DelayState[DStCurr][6]=TMBackward[6][Id];
PathState[DStCurr][0]=State[Id];
dist1=0x7FFFFFFF;
for(c=4;c<8;c++)
{
if(Distance[c]{
dist1=Distance[c];
Id=c;
}
}
DelayState[DStCurr][1]=TMBackward[1][Id-4];
DelayState[DStCurr][3]=TMBackward[3][Id-4];
DelayState[DStCurr][5]=TMBackward[5][Id-4];
DelayState[DStCurr][7]=TMBackward[7][Id-4];
PathState[DStCurr][1]=State[Id];
//更新距离累加值
for(i=0;i<8;i++)
Distance[i]=AccDist[i];
for(i=0;i<8;i++)
{
Id=DelayState[DStCurr][i];
AccDist[i]=Distance[Id]/8*7;
}
for(i=0;i<8;i+=2)
AccDist[i]+=dist0/8;
for(i=1;i<8;i+=2)
AccDist[i]+=dist1/8;
dist0=0x7FFFFFFF;
for(i=0;i<8;i++)
{
if(AccDist[i]{
dist0=AccDist[i];
Id=i;
}
}
j=DStCurr;
for(i=0;i<15;i++)
{
Id=DelayState[j][Id];
j--;if(j<0)j=15;
}
tt=PathState[j][Id%2];
DStCurr++;
if(DStCurr>=16)DStCurr=0;
ss=tt&((1<tt=(tt>>Sht)&0x03;
pp=(tt<<2)|Tdr;
Tdr=tt;
DataOut=((Diff[pp]&0x03)<return(DataOut);
}
 升级会员
升级会员 