机械原理课程设计往复泵动力端运动机构设计和分析.docx
《机械原理课程设计往复泵动力端运动机构设计和分析.docx》由会员分享,可在线阅读,更多相关《机械原理课程设计往复泵动力端运动机构设计和分析.docx(16页珍藏版)》请在冰豆网上搜索。
机械原理课程设计往复泵动力端运动机构设计和分析
一、设计题目
往复泵动力端运动机构设计和分析
二、
机构传动系统方案的确定
1)功能要求:
将原动机的高速旋转运动变为柱塞的低速往复运动
2)工作原理:
往复泵是利用工作腔容积的周期性变化来输送高压流体的,它通常由两部分组成。
一部分直接输送液体,把机械能转换为液体的压力能的液力端,另一部分将原动机的能量传给液力端的动力端。
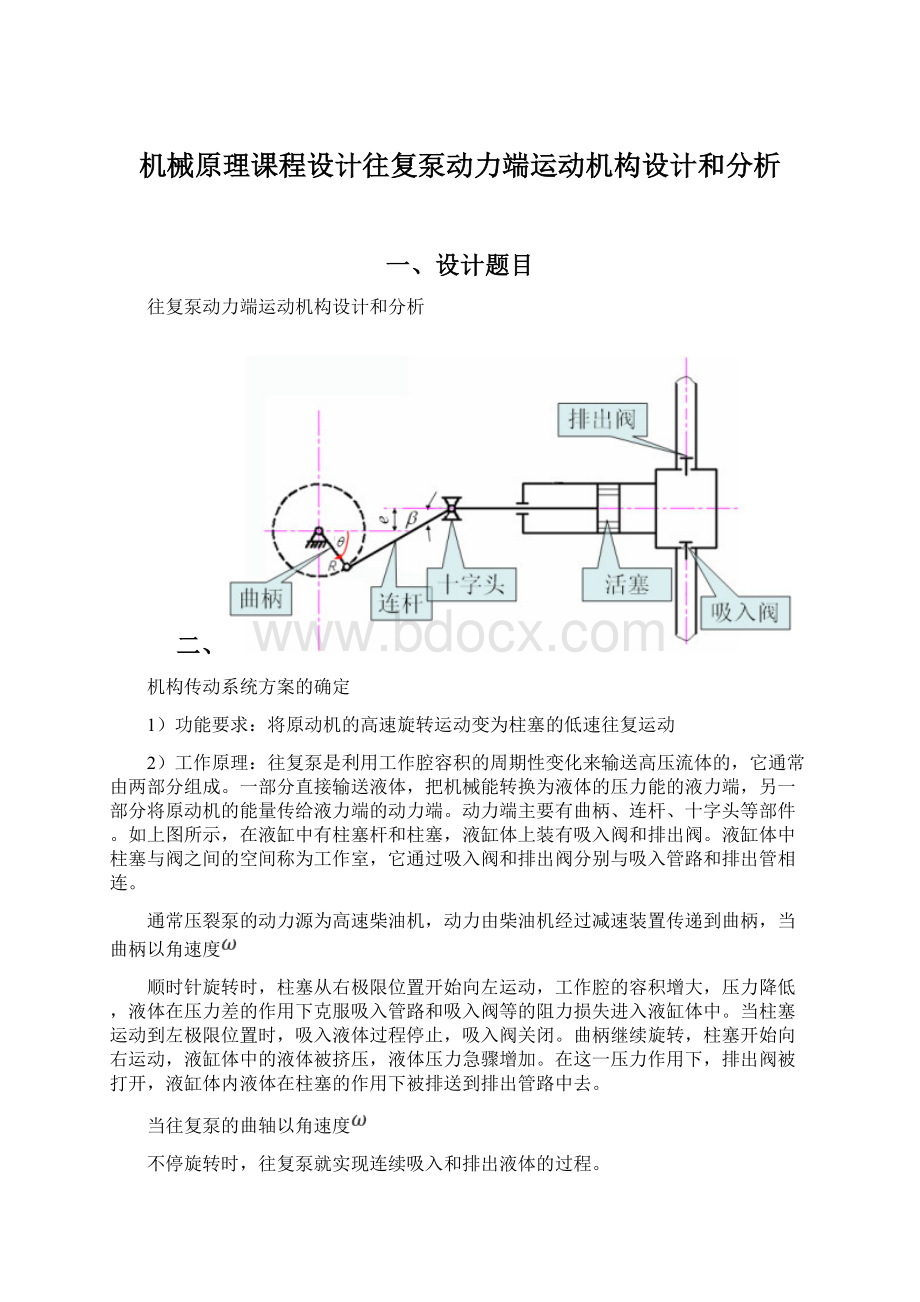
动力端主要有曲柄、连杆、十字头等部件。
如上图所示,在液缸中有柱塞杆和柱塞,液缸体上装有吸入阀和排出阀。
液缸体中柱塞与阀之间的空间称为工作室,它通过吸入阀和排出阀分别与吸入管路和排出管相连。
通常压裂泵的动力源为高速柴油机,动力由柴油机经过减速装置传递到曲柄,当曲柄以角速度
顺时针旋转时,柱塞从右极限位置开始向左运动,工作腔的容积增大,压力降低,液体在压力差的作用下克服吸入管路和吸入阀等的阻力损失进入液缸体中。
当柱塞运动到左极限位置时,吸入液体过程停止,吸入阀关闭。
曲柄继续旋转,柱塞开始向右运动,液缸体中的液体被挤压,液体压力急骤增加。
在这一压力作用下,排出阀被打开,液缸体内液体在柱塞的作用下被排送到排出管路中去。
当往复泵的曲轴以角速度
不停旋转时,往复泵就实现连续吸入和排出液体的过程。
往复泵的曲柄滑块机构一般采用对心式设计,在一些压力高或者由于结构的限制选定的长细比(R/L)值比较大的情况下,可以采用正偏置设计来改善十字头与导板间的正压力和偏磨。
柱塞行程s(mm)
偏心距e(mm)
最大压力角(°)
柴油机转速
(rpm)
冲次N
(冲/分)
柱塞直径
(mm)
排出压力
(MPa)
十字头与导轨的摩擦系数f
十字头质量
(Kg)
曲柄质量
(Kg)
连杆质量
(Kg)
229
24
52
1500
120
70
45
0.13
30
40
70
3)原始数据和设计要求
注:
①其它摩擦及其他构件质量均忽略不计;
②假定泵阀的滞后角为0;
③曲柄和连杆的质量与长度有关,本题假定为已知;
④吸入压力P2=0.01MPa。
三、机构综合的方法和运算结果
1)综合分析
(1)齿轮传动的基本简图如上所示。
齿轮设计采用压力角为20°的直齿圆柱齿轮,根据根切条件可知Zmax>=17,且直齿圆柱齿轮的传动比一般在3-8。
(2)传动比的具体分配方案
依题意有:
n1=1500r/min,n4=120r/min
i14=(-1)mZ2Z3Z4/Z1Z2Z3=Z4/Z1=n1/n4=1500/120=12.5
因为传动比12.5大于8,所以应采取如图分级传动,取Z1=18,则Z4=300
具体传动比分配如下:
i12=Z2/Z1=5=n1/n2→Z2=90,n2=300r/min
齿轮2和3在同一轴上,则有:
n3=n2=300r/min
i34=Z4/Z3=5/2=n3/n4→Z3=120
综上所述:
传动比的分配方案为,i12=5,i34=5/2
(3)曲柄滑块机构的设计
如图所示:
点B运动到B1、B2位置是曲柄滑块机构运动的两极限位置,当点B运动到B3位置(B3在A点正下方),压力角α取最大值。
由图中几何关系得:
Sin52。
=(e+R)/L(S+c)2+e2=L2
整理得:
L=(R+e)/sin(52)
L=[(4S2R2-4S2e2-S4)/(16R2-4S2)]1/2
2)主程序设计
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
ConstPi=3.1415926
Dimx!
y1!
y2!
Picture1.Scale(-18,18)-(18,-18)
Picture1.Line(-14,0)-(14,0)
Picture1.Line(0,14)-(0,-14)
Picture1.CurrentX=11.5:
Picture1.CurrentY=-0.6:
Picture1.Print"X/dm"
Picture1.CurrentY=14:
Picture1.CurrentX=0.6:
Picture1.Print"Y/dm2"
Forx=-8To8Step0.00005
y1=(x+0.24)*(x+0.24)/(Sin(52*Pi/180)*Sin(52*Pi/180))
y2=(4*2.29*2.29*x*x-4*2.29*2.29*0.24*0.24–2.29*2.29*2.29*2.29)/(16*x*x-4*2.29*2.29)
Picture1.PSet(x,y1)
Picture1.PSet(x,y2)
IfAbs(y1-y2)<0.0001ThenPicture1.PrintFormat(x,"#0.#####")
Nextx
EndSub
3)计算结果
由程序运算结果可知:
R=0.69303dm=69.3mm,从而L=(69.3+24)/sin(52°)=118.4mm
四、运动分析的方法和计算结果
1)运动分析
由几何关系不难得出:
c=((L-R)2-e2)1/2=42.8mm,
1=2πn则:
2=Rcos
1/Lcos
(1)位置分析
x=Rcos
+Lcos
+c
由于Rsin
+e=Lsin
可知
所以cos
=[1-(Rsin
+e)2/L2]1/2
也即有:
x=Rcos
+L[1-(Rsin
+e)2/L2]1/2+c
又由
解之即有:
(2)速度分析
根据位置方程对时间求导可得:
V=dx/dt=-Rsin
ω1-Lsinβ·ω2
=-Rsin
·ω1-Lsinβ·Rcos
·ω1/Lcosβ
=-Rsin
·ω1-(Rsin
+e)·Rcos
·ω1/L)/[1-(Rsin
+e)2/L2]1/2
(3)加速度分析
由题意可得:
a=dv/dt=-Rω12cosθ-L(cosβω22+sinβ*
)
又由于
=Rω1·(-sinθcosβω1+sinβcosθω2)/(L·cos2β)
=Rω1·{-sinθ[1-(Rsinθ+e)2/L2]1/2ω1+[(Rsinθ+e)/L]cosθω2}/{L·[1-(Rsinθ+e)2/L2]}
即a=-Rω12cosθ-L(cosβω22+sinβRω1·{-sinθ[1-(Rsinθ+e)2/L2]1/2ω1+[(Rsinθ+e)/L]cosθω2}/{L·[1-(Rsinθ+e)2/L2]})
3)往复泵的运动分析
(1)位移图像分析
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
Dimxasdouble,yasdouble,nasdouble,masdouble
Picture1.Cls
Picture1.Scale(-8,4)-(8,-4)
Picture1.Line(-8,0)-(8,0):
Picture1.Line(0,4)-(0,-4)
Picture1.CurrentX=6.2:
Picture1.CurrentY=-0.2:
Picture1.Print"X/rad"
Picture1.CurrentY=4:
Picture1.CurrentX=0.2:
Picture1.Print"Y/dm
Fori=-7to7
Picture1.Line(i,0)-(i,0.1)
Picture1.CurrentX=i-0.2:
Picture1.CurrentY=-0.1:
Picture1.Printi
Picture1.CurrentX=-0.1:
Picture1.CurrentY=i-0.1:
Picture1.Printi
Nexti
Forx=0To6.283Step0.0001
y=0.693*Cos(x)+1.184*Sqr(1-(0.693*Sin(x)+0.24)*(0.693*Sin(x)+0.24)/(1.184*1.184))+0.428
Picture1.PSet(x,y)
Nextx
Endsub
运行结果如图所示:
(2)速度图像分析
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
Dimxasdouble,yasdouble,nasdouble,masdouble
Picture1.Cls
Picture1.Scale(-8,15)-(8,-15)
Picture1.Line(-8,0)-(8,0):
Picture1.Line(0,15)-(0,-15)
Picture1.CurrentX=6.2:
Picture1.CurrentY=0.2:
Picture1.Print"X/rad"
Picture1.CurrentX=0.2:
Picture1.CurrentY=15:
Picture1.Print"Y/dm/s"
Fori=-14To14
Picture1.Line(i,0)-(i,0.1)
Picture1.CurrentX=i-0.2:
Picture1.CurrentY=-0.1:
Picture1.Printi
Picture1.CurrentX=-0.1:
Picture1.CurrentY=i-0.1:
Picture1.Printi
Nexti
Forx=0To6.283Step0.0001
n=(0.693*Sin(x)+0.24)/1.184
m=0.693*Cos(x)*9.425/(1.184*Sqr(1-n*n))
y=(-0.693)*Sin(x)*9.425–1.184*n*m
Picture1.PSet(x,y)
Nextx
Endsub
运行结果如图所示:
(3)加速度图像分析
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
Dimxasdouble,yasdouble,nasdouble,masdouble
Picture1.Cls
Picture1.Scale(-8,20)-(8,-20)
Picture1.Line(-8,0)-(8,0):
Picture1.Line(0,20)-(0,-20)
Picture1.CurrentX=6.2:
Picture1.CurrentY=0.2:
Picture1.Print"X/rad"
Picture1.CurrentX=0.2:
Picture1.CurrentY=20:
Picture1.Print"Y/m/s2"
Fori=-20To20
Picture1.Line(i,0)-(i,0.1)
Picture1.CurrentX=i-0.2:
Picture1.CurrentY=-0.1:
Picture1.Printi
Picture1.CurrentX=-0.1:
Picture1.CurrentY=i-0.1:
Picture1.Printi
Nexti
Forx=0To6.283Step0.0001
n=(0.0693*Sin(x)+0.024)/0.1184
m=0.0693*Cos(x)*9.425/(0.1184*Sqr(1-n*n))
w=0.0693*9.425*((-Sin(x))*Sqr(1-n*n)*9.425+n*Cos(x)*m)/(0.1184*(1-n*n))
y=(-0.0693)*9.425*9.425*Cos(x)–0.1184*(Sqr(1-n*n)*m*m+n*w)
Picture1.PSet(x,y)
Nextx
EndSub
运行结果如图所示:
4)数据表格
根据原始数据和所学参数,应用excel的计算功能可得往复泵的各个工作参数,如下表所示:
。
Smm
Vmm/s
amm/s2
。
rad/s
0°
228.0421
-135.2025
-9993.1197
8.1396
5.6334
6.5693
15°
220.4632
-407.9960
-9453.2042
1.7125
5.6979
-7.3524
30°
205.6686
-649.1253
-7698.3958
1.7125
5.4996
-22.8685
45°
185.0184
-823.5475
-4635.6752
-16.666
4.9546
-40.3768
60°
160.8764
-894.5296
-284.0427
-27.9363
3.9146
-59.4950
75°
136.5566
-833.6534
4619.4471
-36.2964
2.2296
-76.8513
90°
115.6950
-653.1536
7879.1592
-38.5443
1.1358
-84.4498
105°
100.6842
-428.1421
7806.0352
-35.3453
-2.2296
-76.851
120°
91.5763
-236.7648
5871.9515
-29.2911
-3.9145
-59.4952
135°
87.0134
-100.1502
4070.1898
-22.3286
-4.9546
-40.3770
150°
85.6374
-4.0275
2964.0545
-15.3150
-5.4996
-22.8687
165°
86.5858
69.8990
2439.2056
-15.3109
-5.6979
-7.3526
180°
89.4420
135.2019
2318.8045
-1.9021
-5.6334
6.5691
195°
94.1059
201.4013
2489.4758
4.4984
-5.3355
19.2524
210°
100.7044
275.4887
2873.7400
10.6832
-4.7969
30.7853
225°
109.5274
362.0688
3364.1850
16.5252
-3.9908
40.9153
240°
120.9392
461.3638
3738.3263
21.7305
-2.8955
49.0509
255°
135.2032
565.1103
3609.0369
25.8143
-1.5321
54.4005
270°
152.1911
653.1515
2549.2658
28.1914
-2.2706
56.2747
285°
171.0755
696.6818
422.5113
28.4347
1.5320
51.1834
300°
190.2390
669.9291
-2417.5831
26.5637
2.8954
49.0511
315°
207.5322
561.6296
-5341.6073
23.0737
3.9907
40.9156
330°
220.7354
377.6670
-7788.6547
18.6209
4.7969
30.7856
345°
227.9832
136.6996
-9402.9055
13.6377
5.3355
19.2528
360°
228.0421
-135.1972
-9993.1190
13.6377
5.6334
6.5695
五、对课程设计进行总结
做了两周的课程设计,有很多的心得体会,既有关于往复泵设计分析方面的,更多的是关于在设计过程中所体会的收获与成长。
拿到题目时的第一感觉是不知所措的,感觉无从下手,致使一直放到快交时还有很多没做完,加上复习和各种上机作业,简直有点手忙脚乱,后来没办法只好静下心来慢慢做,我通过自己的努力,在反复的尝试和修改中,终于把整个计算和主要程序编写完成了,实现了预定的功能,以前的vb语言没学扎实,致使常常不能得心应手,一开始的程序这块儿就令我有些迷茫。
后来经过几天几夜的努力,终于有了点头绪,然后又在同学的帮助下,找到了一些参考书,在各种资源的支持下我掌握了程序设计的各种方法,了解了往复泵的更多细节,也理解了在编译过程中常常出现的问题和解决的方法。
两个多星期后我的程序终于完成了。
在机房调试虽然出现了一些问题,但都解决了。
最后,我发现自己对编程竟然也有了一点兴趣,想暑假回家以后自己去买一些东西来做,再补一补c语言。
六、主要参考文献
《往复泵设计》编写组.往复泵设计[M].北京:
机械工业出版社,1987.
朱修传.往复泵总体设计中主要参数的确定[J].煤矿机械.2007.28(4):
29-31.
贾光政,王宣银.液压驱动往复泵的设计特点[J].液压与气动.2002
(2):
44-46.
七、附件(计算程序等).
1)曲柄滑块机构的设计
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
ConstPi=3.1415926
Dimx!
y1!
y2!
Picture1.Scale(-18,18)-(18,-18)
Picture1.Line(-14,0)-(14,0)
Picture1.Line(0,14)-(0,-14)
Picture1.CurrentX=11.5:
Picture1.CurrentY=-0.6:
Picture1.Print"X/dm"
Picture1.CurrentY=14:
Picture1.CurrentX=0.6:
Picture1.Print"Y/dm2"
Forx=-8To8Step0.00005
y1=(x+0.24)*(x+0.24)/(Sin(52*Pi/180)*Sin(52*Pi/180))
y2=(4*2.29*2.29*x*x-4*2.29*2.29*0.24*0.24–2.29*2.29*2.29*2.29)/(16*x*x-4*2.29*2.29)
Picture1.PSet(x,y1)
Picture1.PSet(x,y2)
IfAbs(y1-y2)<0.0001ThenPicture1.PrintFormat(x,"#0.#####")
Nextx
EndSub
2)往复泵的运动分析
(1)位移图像分析
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
Dimxasdouble,yasdouble,nasdouble,masdouble
Picture1.Cls
Picture1.Scale(-8,4)-(8,-4)
Picture1.Line(-8,0)-(8,0):
Picture1.Line(0,4)-(0,-4)
Picture1.CurrentX=6.2:
Picture1.CurrentY=-0.2:
Picture1.Print"X/rad"
Picture1.CurrentY=4:
Picture1.CurrentX=0.2:
Picture1.Print"Y/dm
Fori=-7to7
Picture1.Line(i,0)-(i,0.1)
Picture1.CurrentX=i-0.2:
Picture1.CurrentY=-0.1:
Picture1.Printi
Picture1.CurrentX=-0.1:
Picture1.CurrentY=i-0.1:
Picture1.Printi
Nexti
Forx=0To6.283Step0.0001
y=0.693*Cos(x)+1.184*Sqr(1-(0.693*Sin(x)+0.24)*(0.693*Sin(x)+0.24)/(1.184*1.184))+0.428
Picture1.PSet(x,y)
Nextx
Endsub
(2)速度图像分析
PrivateSubpicture1_Click()
Picture1.ForeColor=RGB(255,0,0)
Dimxasdouble,yasdouble,nasdouble,masdouble
Picture1.Cls
Picture1.Scale(-8,15)-(8,-15)
Picture1.Line(-8,0)-(8,0):
Picture1.Line(0,15)-(0,-15)
Picture1.CurrentX=6.2:
Picture1.CurrentY=0.2:
Picture1.Print"X/rad"
Picture1.CurrentX=0.2:
Picture1.CurrentY=15:
Picture1.Print"Y/dm/s"
Fori=-14To14
Picture1.Line(i,0)-(i,0.1)
Picture1.CurrentX=i-0.2:
Picture1.CurrentY=-0.1:
Picture1.Printi
Picture1.CurrentX=-0.1:
Picture1.CurrentY=i-0.1:
Picture1.Printi
Nexti
Forx=0To6.283Step0.0001
 升级会员
升级会员 