陕西理工学院大学生电子设计竞赛决赛题目要点.docx
《陕西理工学院大学生电子设计竞赛决赛题目要点.docx》由会员分享,可在线阅读,更多相关《陕西理工学院大学生电子设计竞赛决赛题目要点.docx(15页珍藏版)》请在冰豆网上搜索。
陕西理工学院大学生电子设计竞赛决赛题目要点
陕西理工学院2014年电子设计竞赛题目
微弱信号检测装置(A题)
一、任务
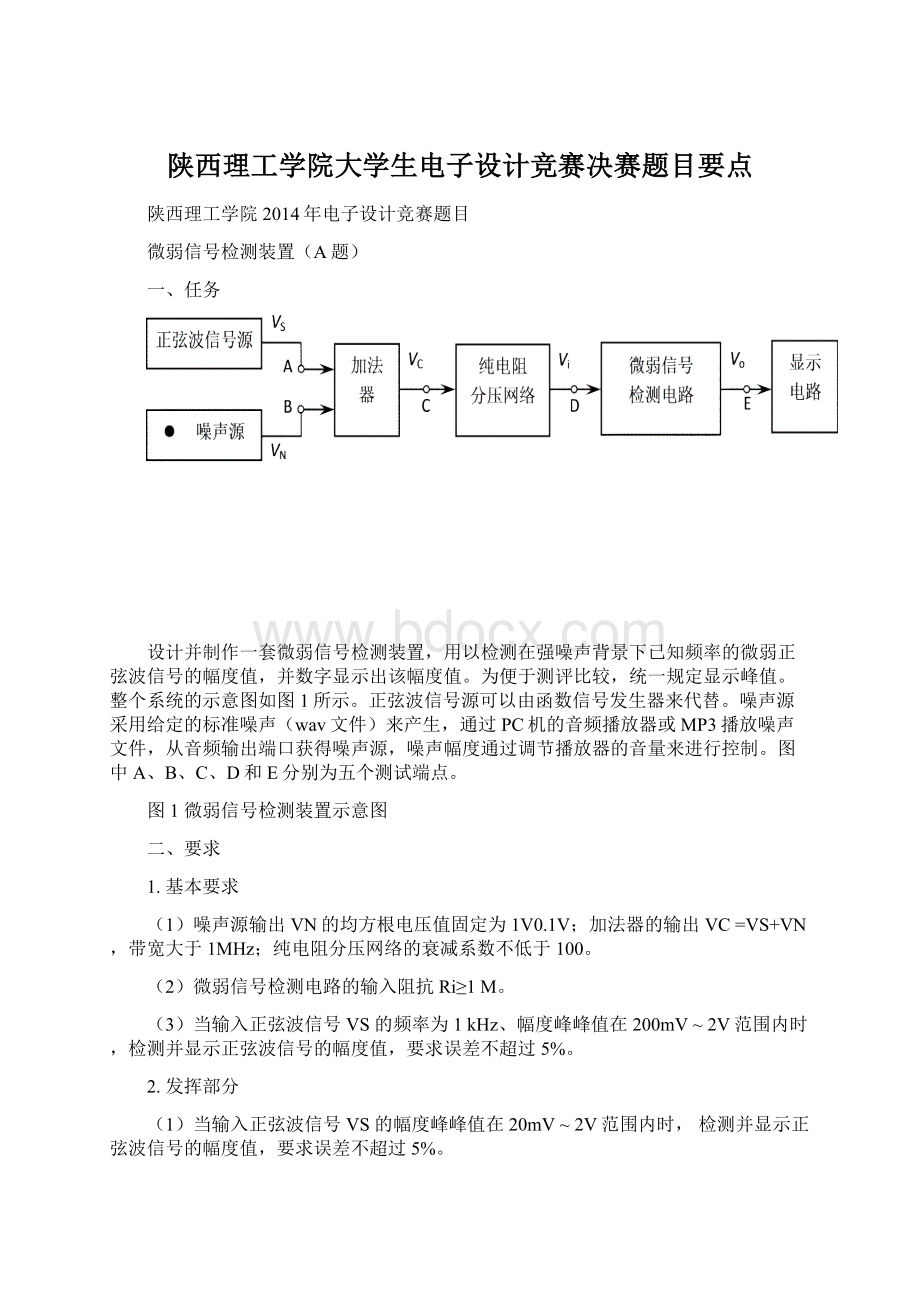
设计并制作一套微弱信号检测装置,用以检测在强噪声背景下已知频率的微弱正弦波信号的幅度值,并数字显示出该幅度值。
为便于测评比较,统一规定显示峰值。
整个系统的示意图如图1所示。
正弦波信号源可以由函数信号发生器来代替。
噪声源采用给定的标准噪声(wav文件)来产生,通过PC机的音频播放器或MP3播放噪声文件,从音频输出端口获得噪声源,噪声幅度通过调节播放器的音量来进行控制。
图中A、B、C、D和E分别为五个测试端点。
图1微弱信号检测装置示意图
二、要求
1.基本要求
(1)噪声源输出VN的均方根电压值固定为1V0.1V;加法器的输出VC=VS+VN,带宽大于1MHz;纯电阻分压网络的衰减系数不低于100。
(2)微弱信号检测电路的输入阻抗Ri≥1M。
(3)当输入正弦波信号VS的频率为1kHz、幅度峰峰值在200mV~2V范围内时,检测并显示正弦波信号的幅度值,要求误差不超过5%。
2.发挥部分
(1)当输入正弦波信号VS的幅度峰峰值在20mV~2V范围内时,检测并显示正弦波信号的幅度值,要求误差不超过5%。
(2)扩展被测信号VS的频率范围,当信号的频率在500Hz~2kHz范围内,检测并显示正弦波信号的幅度值,要求误差不超过5%。
(3)进一步提高检测精度,使检测误差不超过2%。
(4)其它(例如,进一步降低VS的幅度等)。
三、说明
1.微弱信号检测电路要求采用模拟方法来实现。
常用的微弱信号检测方法有:
滤波,锁相放大,取样积分等(仅供参考)。
2.为便于各个模块的测试,所有测试端点(A~E)应做成跳线连接方式。
3.检测并显示正弦波信号的幅度值是指输入正弦波信号VS的幅度(即峰值)。
4.测评时,应固定使用某一装置(PC机或MP3)来产生噪声源,所有作品均应采用该噪声源进行测试。
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
其它
10
总分
50
简易直流电子负载(B题)
一、任务
设计和制作一台恒流(CC)工作模式的简易直流电子负载。
其原理示意图如图1所示。
图1直流电子负载原理示意图
二、要求
1.基本要求
(1)恒流(CC)工作模式的电流设置范围为100mA~1000mA,设置分辨率为10mA,设置精度为±1%。
还要求CC工作模式具有开路设置,相当于设置的电流值为零。
(2)在恒流(CC)工作模式下,当电子负载两端电压变化10V时,要求输出电流变化的绝对值小于变化前电流值的1%。
(3)具有过压保护功能,过压阈值电压为18V±0.2V。
2.发挥部分
(1)能实时测量并数字显示电子负载两端的电压,电压测量精度为±(0.02%+0.02%FS),分辨力为1mV。
(2)能实时测量并数字显示流过电子负载的电流,电流测量精度为±(0.1%+0.1%FS),分辨力为1mA。
(3)具有直流稳压电源负载调整率自动测量功能,测量范围为0.1%~19.9%,测量精度为±1%。
为方便,本题要求被测直流稳压电源的输出电压在10V以内。
(4)其他。
三、说明:
1.在恒流(CC)模式下,不管电子负载两端电压是否变化,流过电子负载的电流为一个设定的恒定值,该模式适合用于测试直流稳压电源的调整率,电池放电特性等场合。
2.直流稳压电源负载调整率是指电源输出电流从零至额定值变化时引起的输出电压变化率。
为方便,本题额定输出电流值设定为1A。
3.负载调整率的测量过程要求自动完成,即在输入有关参数后,能直接给出电源的负载调整率。
4.为了方便负载调整率的测量,可以在被测直流稳压电源的输出端串接一个电阻RW,更换不同阻值的RW,可以改变被测电源的负载调整率。
测试示意图如图2所示。
图2负载调整率测试示意图
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
其它
10
总分
50
简易混合信号示波器(C题)
一、任务
设计并制作一台简易混合信号示波器(MSO),其组成框图如图1所示:
二、要求
1.基本要求
(1)被测信号要求:
类型:
正弦波;
频率:
100Hz≤f≤500KHz;
幅度(峰峰值):
0.1V≤Vp-p≤10V。
(2)仪器能对被测信号进行采集、存储与显示,显示波形无明显失真,显示信号幅度无明显变化。
(3)垂直灵敏度分为0.05V/div、0.5V/div、1V/div和2V/div共四档(手动调整);触发方式为自动;电压误差≤5%。
(4)水平显示分辨率≥20点/div,设置1ms/div、0.1ms/div、10μs/div、1μs/div共四档扫描速度(手动调整)。
(5)输字信号发生器循环输出4路数字信号,其波特率为10Mb/s,码长为16位,码型有加计数、减计数两种固定码型。
(6)在示波器同一液晶屏上显示输出信号的码型示意波形。
2.发挥部分
(1)增加垂直灵敏度档位,使被测信号幅度达到:
0.05V≤Vp-p≤20V。
(2)增加扫描速度挡位,使被测信号频率达到:
10Hz≤f≤5MHz。
(3)信号发生器的码率可变(10Mb/s,20Mb/s,30Mb/s),通过键盘能任意设置码型,并输出相应波特率和码型的4路数字信号。
三、说明
1.示波器所测试的模拟信号和数字信号应同时显示在同一液晶屏上。
2.不限制数字信号发生器输出信号的逻辑电平。
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
其它
10
总分
50
无线路灯控制系统(D题)
一、任务
设计并制作一个模拟无线控制路灯系统,如图1示。
可控制路灯256个,实际制作三个。
图1.无线路灯控制系统示意图
二、要求
1.基本要求
(1)控制台和各灯控制器距离不小于5米,各发射器频率在(30—40)MHz之间,发射峰值功率不大于20mW(50Ω假负载上测定),各单元发射接收采用同一个线天线,长度小于1米。
(2)在控制台上有时间显示,并当到指定时间A时自动发出路灯全部打开的指令,点亮全部路灯;到指定时间B时会发出指令关掉编号为奇数的路灯;到指定时间C时会发出指令关闭所有路灯。
(3)如果在路灯点亮时有损坏的路灯,应能及时在控制台上声光报警,并给出故障路灯的编号。
2.发挥部分
(1)在到达指定时间B时间时,奇数日期关闭编号为奇数的路灯,偶数日期关闭编号为偶数的路灯。
(2)有功率检测装置,并能在控制台上显示瞬时供电功率。
一旦超正常状态3%即在控制台上报警,并切断路灯供电。
(3)有触电保护功能。
如果有人畜触电情况,立即切断电源并在主控台报警。
(4)所有告警信息均能通过现有的移动通信网络向值班手机进行语音和短信报告。
三、说明
1.光源采用LED灯,LED的类型不作限定(发光二极管也可)。
2.无线收发单元必须自制,不能使用常见模块,芯片如NRF9E5、NRF2401等。
3.相应的测试要求需留有电流、电压测量端口。
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
完成第(4)项
10
总分
50
自动停泊智能车(E题)
一、任务
设计并制作一个简易智能电动车,具有自动泊车功能。
下图是停车场。
A,B是泊车位,黑色加粗线是黑色胶带,地板除了贴黑色胶布以外的地方都染成白色。
停车位A与B之间都是固体障碍物,用来模拟已经停好的车辆,停车场中有阴影斜线的边是木板,停车场其他边没有木板。
木板高度、障碍物高度均为30cm,停车场如图所示。
二、要求
1.基本要求
(1)电动车尺(含加在车体上的其他装置)要求如下:
0.2m<=长度<=0.3m,0.15m<=宽度<=0.22m
(2)不允许电动车以光引导、声音引导等方式引导小车进入车位。
要求参赛者在矩形停车场边上、四个角的顶点安装定位设备(如超声波接收器,麦克风等)用来确定小车的位置,安装定位设备数目不限。
要求能实时显示电动车的坐标。
坐标系以顶点C为原点,原点连接的2条边为x轴和y轴,如上图所示。
(3)电动车初始位置由评审员指定,但必须在停车场场地之内,而车头朝向则由参赛者自己决定。
(4)启动后,电动车自动寻找停车位A,并以插入的方式(以车头插入或者车尾插入停车位)自动停车,要求电动车停好车后在黑色粗线之内,电动车停完成停车动作时要给出声音提示。
(5)整个过程在2分钟之内完成。
(6)电动车具有秒表功能,能显示整个过程所花的时间。
2.发挥部分
(1)小车在完成基本要求后,在停车场A停留10秒后自动寻找停车场B,并把小车停在停车场B的黑色粗线之内,电动车停完成停车动作时要给出声音提示。
要求小车在完成该部分功能时,除了保持显示完成基本要求部分所花的时间,还要另外为发挥部分计时,计时从小车在停车场A停好车并发出声音提示后开始。
(2)要求该过程在1分钟之内完成。
(3)尽量避免碰撞。
三、说明
(1)基本要求
(1)
(2)(3)(4)(5)可观察得知。
基本要求(5)如果参赛者在2分钟内完成,该部分满分。
其他时间酌情给分。
(2)基本要求(6)与发挥部分(3),小车碰撞3次以内不扣分,超过3次以后,每撞1次扣0.5分,扣到该部分分数为0为止。
(3)发挥部分
(2),小车在1分钟内完成给满分,其他时间酌情给分。
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
其它
10
总分
50
手写绘图板(F题)
一、任务
利用普通PCB覆铜板设计和制作手写绘图输入设备。
系统构成框图如图1所示。
普通覆铜板尺寸为15cm×10cm,其四角用导线连接到电路,同时,一根带导线的普通表笔连接到电路。
表笔可与覆铜板表面任意位置接触,电路应能检测表笔与铜箔的接触,并测量触点位置,进而实现手写绘图功能。
覆铜板表面由参赛者自行绘制纵横坐标以及6cmx4cm(高精度区A)和12cmx8cm(一般精度区B)如图中两个虚线框所示。
图1.系统构成框图
二、要求
1.基本要求:
(1)指示功能:
表笔接触铜箔表面时,能给出明确显示。
(2)能正确显示触点位于纵坐标左右位置。
(3)能正确显示触点四象限位置。
(4)能正确显示坐标值。
(5)显示坐标值的分辨率为10mm,绝对误差不大于5mm。
2.发挥部分:
(1)进一步提高坐标分辨率至8mm和6mm;要求分辨率为8mm时,绝对误差不大于4mm;分辨率为6mm时,绝对误差不大于3mm。
(2)绘图功能。
能跟踪表笔动作,并显示绘图轨迹。
在A区内画三个直径分别为20mm,12mm和8mm不同直径的圆,并显示该圆;20mm的圆要求能在10s内完成,其它圆不要求完成时间。
(3)低功耗设计。
功耗为总电流乘12V;功耗越低得分越高。
要求功耗等于或小于1.5W。
(4)其他。
如显示文字,提高坐标分辨率等。
三、说明
1.必须使用普通的覆铜板
(1)不得更换其它高电阻率的材料。
(2)不得对铜箔表面进行改变电阻率的特殊镀层处理。
(3)覆铜板表面的刻度自行绘制,测试时以该刻度为准。
(4)考虑到绘制刻度影响测量,不要求表笔接触刻度线条时也具有正确检测能力。
2.覆铜板到电路的连接应满足以下条件
(1)只有铜箔四角可连接到电路,除此之外不应有其它连接点(表笔触点除外)。
(2)不得使用任何额外传感装置。
3.表笔可选用一般的万用表表笔。
4.电源供电必须为单12V供电。
5.基本要求除(5)外均在B区测,测分辨率和圆均在A区内测。
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
其它
10
总分
50
四旋翼自主飞行器(G题)
一、任务
设计并制作一架四旋翼自主飞行器。
飞行区域俯视图和立体图分别如图1和图2所示。
图1.飞行区域俯视图(图中单位:
cm)
图2.飞行区域立体图(图中单位:
cm)
二、要求
1.基本要求
(1)四旋翼自主飞行器(下简称飞行器)摆放在图1所示的A区,一键式启动飞行器起飞;飞向B区,在B区降落并停机;飞行时间不大于45s。
(2)飞行器摆放在B区,一键式启动飞行器起飞;飞向A区,在A区降落并停机;飞行时间不大于45s。
2.发挥部分
(1)飞行器摆放在A区,飞行器下面摆放一薄铁片,一键式启动,飞行器拾取薄铁片并起飞。
(2)飞行器携带薄铁片从示高线上方飞向B区,并在空中将薄铁片投放到B区;飞行器从示高线上方返回A区,在A区降落并停机。
(3)以上往返飞行时间不大于30s。
(4)其他。
三、说明
1.飞行器桨叶旋转速度高,有危险!
请务必注意自己及他人的人身安全。
2.飞行器可自制或外购,带防撞圈,外形尺寸(含防撞圈)限定为:
长度≤50cm,宽度≤50cm。
飞行器机身必须标注参赛队号。
3.薄铁片为边长4cm的正方形,厚度≤0.05cm。
4.飞行区域地面为白色;A区、B区形状大小相同,由直径20cm黑色实心圆和直径75cm的同心圆组成,同心圆虚线线宽小于0.1cm;引导线宽度4cm,可用黑色胶带;示高线为直径0.5~0.8cm的黑色电缆线,横向悬挂于飞行区中间,距地高100cm。
飞行区域不得额外设置任何标识、引导线或其他装置。
5.测试全程不得更换电池。
6.飞行器不得遥控,飞行过程中不得人为干预。
7.飞行器飞行期间,触及地面后自行恢复飞行的,酌情扣分;触地后5s内不能自行恢复飞行视为失败,失败前完成动作仍计分。
8.飞行器起飞,距地面高度10cm以上视为飞离地面。
9.一键式启动是指飞行器摆放在A区或B区后,只允许按一个键启动。
如有飞行模式设置应在飞行器摆放在A区或B区前完成。
四、评分标准
设计报告
项目
满分
方案论证
5
理论分析与计算
4
电路设计
6
测试方案与测试结果
3
设计报告结构及规范性
2
总分
20
基本要求
实际制作完成情况
50
发挥部分
完成第
(1)项
13
完成第
(2)项
12
完成第(3)项
15
其它
10
总分
50
 升级会员
升级会员 