机械原理设计说明书.docx
《机械原理设计说明书.docx》由会员分享,可在线阅读,更多相关《机械原理设计说明书.docx(27页珍藏版)》请在冰豆网上搜索。
机械原理设计说明书
机械原理设计说明书
目的:
机械原理课程大作业是高等工业学校机械类专业学生第一次叫全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要的课程教学环节,其目的在于进一步加深学生所学理论知识,培养学生独立解决有关课程实际问题的能力,使学生对于机械运动学和动力学分析与设计有一较完整的概念,具备计算、制图和使用技术资料的能力。
(一):
设计内容:
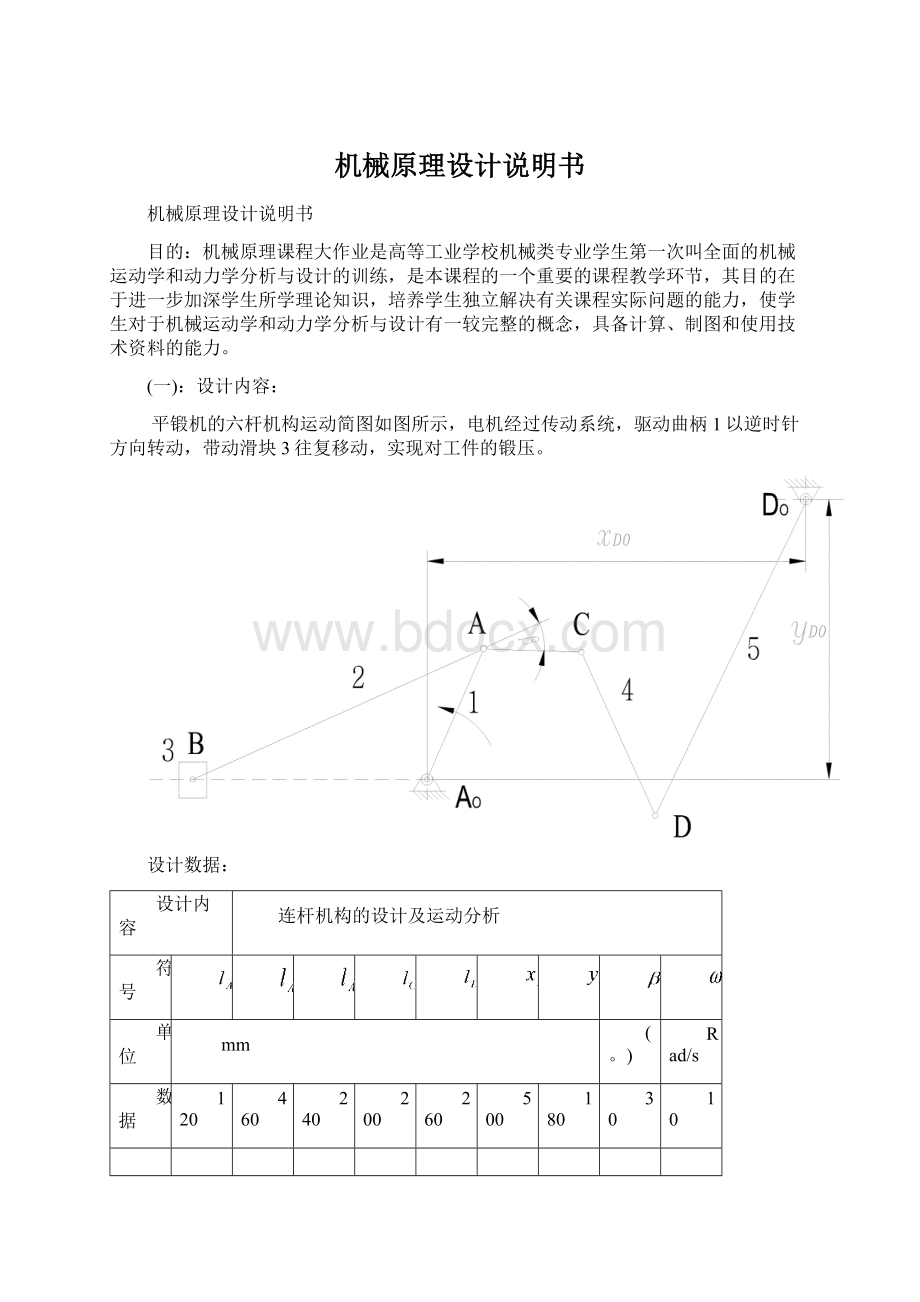
平锻机的六杆机构运动简图如图所示,电机经过传动系统,驱动曲柄1以逆时针方向转动,带动滑块3往复移动,实现对工件的锻压。
设计数据:
设计内容
连杆机构的设计及运动分析
符号
单位
mm
(。
)
Rad/s
数据
120
460
240
200
260
500
180
30
10
根据已知数据,编写计算,求出曲柄转动一周时滑块3的位移、速度、加速度并绘出相应的曲线。
绘出杆件4和5的角速度和角加速度曲线。
(二):
连杆机构的运动分析:
由机构组成原理可知,任何平面连杆机构都可以看做是由若干个基本杆组依次连接于原动件和机架上而组成,因此对于常见的基本杆组进行运动分析并建立相应的子函数库,在进行机构运动分析时,就可以根据机构的组成情况,将机构分解成若干个杆组,原动件,编制一个调用该机构杆组的子函数的主程序,既可以实现对整个机构的运动分析。
工程实际中大多数机构是二级杆组,这里主要介绍同一个杆件上两点间的运动分析和常见的RRR型,RRP型和RPR型。
因此,我们可以把该六杆机构进行拆分杆组,得到:
一个主动件,两个二级杆组。
图
(1):
对主动件进行分析:
已知构件上一点p1点位置矢量P1,加速度a1,p1p2两点之间的距离r1位置角
,角速度
角加速度
,调用函数
Function[a2,v2,p2]=rigid(a1,v1,p1,w1,e1,r1,phi)
其中,a2,v2,p2分别代表点P2的加速度,速度,位置;a1,v1,p1,w1,e1,r1,phi分别代表点P1的加速度,速度,位置,角速度,角加速度,P1P2两点之间的距离。
图
(2):
图2为RRP型二级杆组。
RRP型二级杆组由两个构件和两个转动副一个移动副组成。
其调用函数为
Function:
[p3,th2,s,v3,w2,vr1,a3,e2,ar1]=KRRP(p2,p1,v2,v1,vbet,a2,a1,abet,r2,bet,m1)
变量说明:
m为装配模式,分析可知m=1.p3,v3,a3分别代表点P3的位置,速度,加速度。
th2杆件2杆长矢量的幅角。
vbet,abet,bet分别代表导杆的位置角,转动角速度,和角加速度。
s,vr1e2,ar1分别代表导杆长度,滑块相对于导杆的速度,角加速度,速度。
图(3):
为RRR型二级杆组:
其由两个构件和三个转动副构成.已知,两杆长r4,r5,两个外接转动副p5,p6的加速度,速度,位置。
其调用函数为:
Function:
[p5,th4,th6,v5,w4,w5,a5,e4,e5]=KRRR(p4,p6,v4,v6,a4,a6,r4,r5,m2)
(三)主程序如下:
clear
r1=0.12;r2=0.46;r4=0.2;r5=0.26;r12=0.24;
p1=0;v1=0;a1=0;w1=10;e1=0;
w2=w1;e2=0;p6=0.5+0.18i;v6=0;a6=0;
phi=linspace(0,2*pi,360);
[a2,v2,p2]=rigid(a1,v1,p1,w1,e1,r1,phi);%求杆件1上点P2的位置速度和加速度
m1=1;bet=pi;vbet=0;abet=0;
[p3,th2,s,v3,w2,vr1,a3,e2,ar1]=KRRP(p2,p1,v2,v1,vbet,a2,a1,abet,r2,bet,m1);%求二级杆组RRP型的参数
p3r=real(p3);v3r=real(v3);a3r=real(a3);
[a4,v4,p4]=rigid(a2,v2,p2,w2,e2,r12,(th2-pi*5/6));%原动件上P4点的参数
m2=1;
[p5,th4,th6,v5,w4,w5,a5,e4,e5]=KRRR(p4,p6,v4,v6,a4,a6,r4,r5,m2);%杆组RRR型的各个参数
phid=phi*180/pi;
figure
(1);plot(phid,p3r)
title('滑块的位移曲线');
xlabel('\phid(度)');ylabel('s(m)')
figure
(2);plot(phid,v3r)
title('滑块的速度曲线');
xlabel('\phid(度)');ylabel('v(m/s)')
figure(3);plot(phid,a3r)
title('滑块的加速度曲线');
xlabel('\phid(度)');ylabel('a(m/s/s)')
figure(4);plot(phid,w4)
title('构件4的角速度曲线');
xlabel('\phid(度)');ylabel('w(rad/s)')
figure(5);plot(phid,e4)
title('构件4的角加速度曲线');
xlabel('\phid(度)');ylabel('e(rad/s/s)')
figure(6);plot(phid,w5)
title('构件5的角速度曲线');
xlabel('\phid(度)');ylabel('w(rad/s)')
figure(7);plot(phid,e5)
title('构件5的角加速曲线');
xlabel('\phid(度)');ylabel('e(rad/s/s)')
调用的函数如下:
Rigid子函数:
%Fordeterminethekinamiticaofratoryrigidmotion,a1,v1,p1isdefined
function[a2,v2,p2]=rigid(a1,v1,p1,w,e1,r,theta)
p2=p1+r*exp(i*theta);
v2=v1+i*r*w.*exp(i*theta);
a2=a1-(w.^2-i*e1).*r.*exp(i*theta);
KRRR子函数:
function[p3,the1,the2,v3,w1,w2,a3,e1,e2]=KRRR(p1,p2,v1,v2,a1,a2,r1,r2,m)
%detreminetheaccelerationofRRRcomponent,knownp1,p2,r1,r2;
%positionanalysis
p12=p2-p1;
d=abs(p12);
phi=angle(p12);
test1=(r1+r2)-d;
test2=d-abs(r1-r2);
if(test1>=0|test2>=0)
cosin=(r1^2+d.^2-r2^2)./(2*r1*d);
alph=atan2(sqrt(1-cosin.^2),cosin);
the1=phi+m*alph;
p3=p1+r1*exp(i*the1);
the2=angle(p3-p2);
else
disp('KP21cannotbeassembled!
');
end
%volicity
v21m=abs(v2-v1);vthe=angle(v2-v1);
w2=v21m.*cos(the1-vthe)./(r2*sin(the2-the1));
w1=-v21m.*cos(the2-vthe)./(r1*sin(the1-the2));
v3=v1+i*w1.*(p3-p1);
%accelareteanalysis
a21m=abs(a2-a1);theta=angle(a2-a1);
e1=-(a21m.*cos(the2-theta)+r1*w1.^2.*cos(the2-the1)-r2*w2.^2)./(r1*sin(the1-the2));
e2=(a21m.*cos(the1-theta)-r2*w2.^2.*cos(the1-the2)+r1*w1.^2)./(r2*sin(the2-the1));
a3=a1+(i*e1-w1.^2).*(p3-p1);
KRRP子函数:
function[p3,the1,r2,v3,w1,vr2,a3,e1,ar2]=KRRP(p1,p2,v1,v2,vbet,a1,a2,abet,r1,bet,m)
%determinetheaccelerationofRRPcomponent,knownp1,p2,r1,bet;
%position
p21=p2-p1;
d=abs(p21);
phi=angle(p21);
test1=r1^2-d.^2.*(sin(phi-bet)).^2;
if(test1>=0)
sq=sqrt(test1);
mode=m;
if(r1>=d)
mode=1;
end
r2=mode*sq-d.*cos(phi-bet);
p3=p2+r2.*exp(i*bet);
the1=angle(p3-p1);
else
disp('KP22cannotbeassembled!
');
end
%volicity
v21m=abs(v2-v1);thev=angle(v2-v1);
w1=(v21m.*sin(thev-bet)+r2.*vbet)./(r1.*cos(the1-bet));
vr2=-(v21m.*cos(thev-the1)-r2.*vbet.*sin(bet-the1))./(cos(bet-the1));
v3=v1+i*w1.*(p3-p1);
%acceleration
a21m=abs(a2-a1);
thea=angle(a2-a1);
e1=(a21m.*sin(thea-bet)+r1*w1.^2.*sin(the1-bet)+r2.*abet+2*vbet.*vr2)./(r1*cos(the1-bet));
ar2=-a21m.*cos(thea-bet)+r2.*vbet.^2-r1*e1.*sin(the1-bet)-r1*w1.^2.*cos(the1-bet);
a3=a1+(i*e1-w1.^2).*r1.*exp(i*(the1));
滑块3的位移,速度,加速度数值和相应的曲线如下:
(滑块3的位移):
p3r=
Columns1through12
-0.3400-0.3400-0.3401-0.3401-0.3402-0.3403-0.3405-0.3407-0.3409-0.3411-0.3414-0.3416
Columns13through24
-0.3420-0.3423-0.3427-0.3431-0.3435-0.3439-0.3444-0.3449-0.3454-0.3460-0.3466-0.3472
Columns25through36
-0.3478-0.3485-0.3492-0.3499-0.3506-0.3514-0.3522-0.3530-0.3539-0.3548-0.3557-0.3566
Columns37through48
-0.3576-0.3586-0.3596-0.3606-0.3617-0.3628-0.3639-0.3650-0.3662-0.3674-0.3686-0.3699
Columns49through60
-0.3711-0.3724-0.3738-0.3751-0.3765-0.3779-0.3793-0.3808-0.3822-0.3837-0.3853-0.3868
Columns61through72
-0.3884-0.3900-0.3916-0.3932-0.3949-0.3965-0.3983-0.4000-0.4017-0.4035-0.4053-0.4071
Columns73through84
-0.4089-0.4107-0.4126-0.4145-0.4164-0.4183-0.4202-0.4222-0.4242-0.4261-0.4281-0.4302
Columns85through96
-0.4322-0.4342-0.4363-0.4383-0.4404-0.4425-0.4446-0.4467-0.4488-0.4509-0.4531-0.4552
Columns97through108
-0.4574-0.4595-0.4617-0.4638-0.4660-0.4682-0.4703-0.4725-0.4747-0.4768-0.4790-0.4812
Columns109through120
-0.4833-0.4855-0.4877-0.4898-0.4920-0.4941-0.4962-0.4983-0.5005-0.5026-0.5047-0.5067
Columns121through132
-0.5088-0.5108-0.5129-0.5149-0.5169-0.5189-0.5209-0.5228-0.5247-0.5266-0.5285-0.5304
Columns133through144
-0.5322-0.5341-0.5359-0.5376-0.5394-0.5411-0.5428-0.5444-0.5460-0.5476-0.5492-0.5507
Columns145through156
-0.5522-0.5537-0.5551-0.5565-0.5579-0.5592-0.5605-0.5618-0.5630-0.5642-0.5653-0.5664
Columns157through168
-0.5675-0.5685-0.5695-0.5704-0.5713-0.5722-0.5730-0.5738-0.5745-0.5752-0.5758-0.5764
Columns169through180
-0.5770-0.5775-0.5779-0.5783-0.5787-0.5790-0.5793-0.5795-0.5797-0.5799-0.5799-0.5800
Columns181through192
-0.5800-0.5799-0.5799-0.5797-0.5795-0.5793-0.5790-0.5787-0.5783-0.5779-0.5775-0.5770
Columns193through204
-0.5764-0.5758-0.5752-0.5745-0.5738-0.5730-0.5722-0.5713-0.5704-0.5695-0.5685-0.5675
Columns205through216
-0.5664-0.5653-0.5642-0.5630-0.5618-0.5605-0.5592-0.5579-0.5565-0.5551-0.5537-0.5522
Columns217through228
-0.5507-0.5492-0.5476-0.5460-0.5444-0.5428-0.5411-0.5394-0.5376-0.5359-0.5341-0.5322
Columns229through240
-0.5304-0.5285-0.5266-0.5247-0.5228-0.5209-0.5189-0.5169-0.5149-0.5129-0.5108-0.5088
Columns241through252
-0.5067-0.5047-0.5026-0.5005-0.4983-0.4962-0.4941-0.4920-0.4898-0.4877-0.4855-0.4833
Columns253through264
-0.4812-0.4790-0.4768-0.4747-0.4725-0.4703-0.4682-0.4660-0.4638-0.4617-0.4595-0.4574
Columns265through276
-0.4552-0.4531-0.4509-0.4488-0.4467-0.4446-0.4425-0.4404-0.4383-0.4363-0.4342-0.4322
Columns277through288
-0.4302-0.4281-0.4261-0.4242-0.4222-0.4202-0.4183-0.4164-0.4145-0.4126-0.4107-0.4089
Columns289through300
-0.4071-0.4053-0.4035-0.4017-0.4000-0.3983-0.3965-0.3949-0.3932-0.3916-0.3900-0.3884
Columns301through312
-0.3868-0.3853-0.3837-0.3822-0.3808-0.3793-0.3779-0.3765-0.3751-0.3738-0.3724-0.3711
Columns313through324
-0.3699-0.3686-0.3674-0.3662-0.3650-0.3639-0.3628-0.3617-0.3606-0.3596-0.3586-0.3576
Columns325through336
-0.3566-0.3557-0.3548-0.3539-0.3530-0.3522-0.3514-0.3506-0.3499-0.3492-0.3485-0.3478
Columns337through348
-0.3472-0.3466-0.3460-0.3454-0.3449-0.3444-0.3439-0.3435-0.3431-0.3427-0.3423-0.3420
Columns349through360
-0.3416-0.3414-0.3411-0.3409-0.3407-0.3405-0.3403-0.3402-0.3401-0.3401-0.3400-0.3400
(滑块3的速度)v3r=
Columns1through12
-0.0000-0.0155-0.0310-0.0466-0.0621-0.0776-0.0931-0.1087-0.1242-0.1397-0.1552-0.1707
Columns13through24
-0.1863-0.2018-0.2173-0.2328-0.2483-0.2638-0.2793-0.2948-0.3103-0.3258-0.3412-0.3567
Columns25through36
-0.3721-0.3876-0.4030-0.4184-0.4338-0.4492-0.4646-0.4799-0.4952-0.5105-0.5258-0.5410
Columns37through48
-0.5562-0.5714-0.5865-0.6016-0.6167-0.6317-0.6466-0.6615-0.6763-0.6911-0.7058-0.7205
Columns49through60
-0.7350-0.7495-0.7639-0.7782-0.7925-0.8066-0.8206-0.8345-0.8483-0.8620-0.8756-0.8890
Columns61through72
-0.9023-0.9154-0.9284-0.9412-0.9539-0.9664-0.9787-0.9909-1.0028-1.0145-1.0261-1.0374
Columns73through84
-1.0485-1.0594-1.0700-1.0804-1.0905-1.1004-1.1100-1.1193-1.1284-1.1371-1.1456-1.1537
Columns85through96
-1.1615-1.1690-1.1762-1.1830-1.1895-1.1956-1.2014-1.2068-1.2118-1.2165-1.2207-1.2246
Columns97through108
-1.2280-1.2310-1.2337-1.2358-1.2376-1.2389-1.2398-1.2403-1.2403-1.2398-1.2389-1.2375
Columns109through120
-1.2356-1.2333-1.2305-1.2272-1.2235-1.2192-1.2145-1.2092-1.2035-1.1973-1.1906-1.1834
Columns121through132
-1.1758-1.1676-1.1589-1.1498-1.1401-1.1300-1.1193-1.1082-1.0966-1.0845-1.0720-1.0589
Columns133through144
-1.0454-1.0315-1.0170-1.0021-0.9868-0.9710-0.9548-0.9381-0.9210-0.9035-0.8855-0.8672
Columns145through156
-0.8484-0.8293-0.8098-0.7898-0.7696-0.7489-0.7279-0.7066-0.6849-0.6629-0.6406-0.6180
Columns157through168
-0.5951-0.5719-0.5484-0.5
 升级会员
升级会员 