matlabSIMULINK仿真实例.docx
《matlabSIMULINK仿真实例.docx》由会员分享,可在线阅读,更多相关《matlabSIMULINK仿真实例.docx(16页珍藏版)》请在冰豆网上搜索。
matlabSIMULINK仿真实例
二并联杆数控螺旋面钻头尖刃磨机的机构仿真
一、仿真原理一、实训题目:
全自动洗衣机控制系统
实训目的及要求:
1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力
2、掌握PLC梯形图的基本设计方法
3、培养分析和解决实际工程问题的能力
4、培养程序设计及调试的能力
5、熟悉传输带控制系统的原理及要求
实训设备:
:
1、OMRONPLC及模拟实验装置1台
2、安装CX-P编程软件的PC机1台
3、PC机PLC通讯的RS232电缆线1根
实训内容:
1、分析工艺过程,明确控制要求
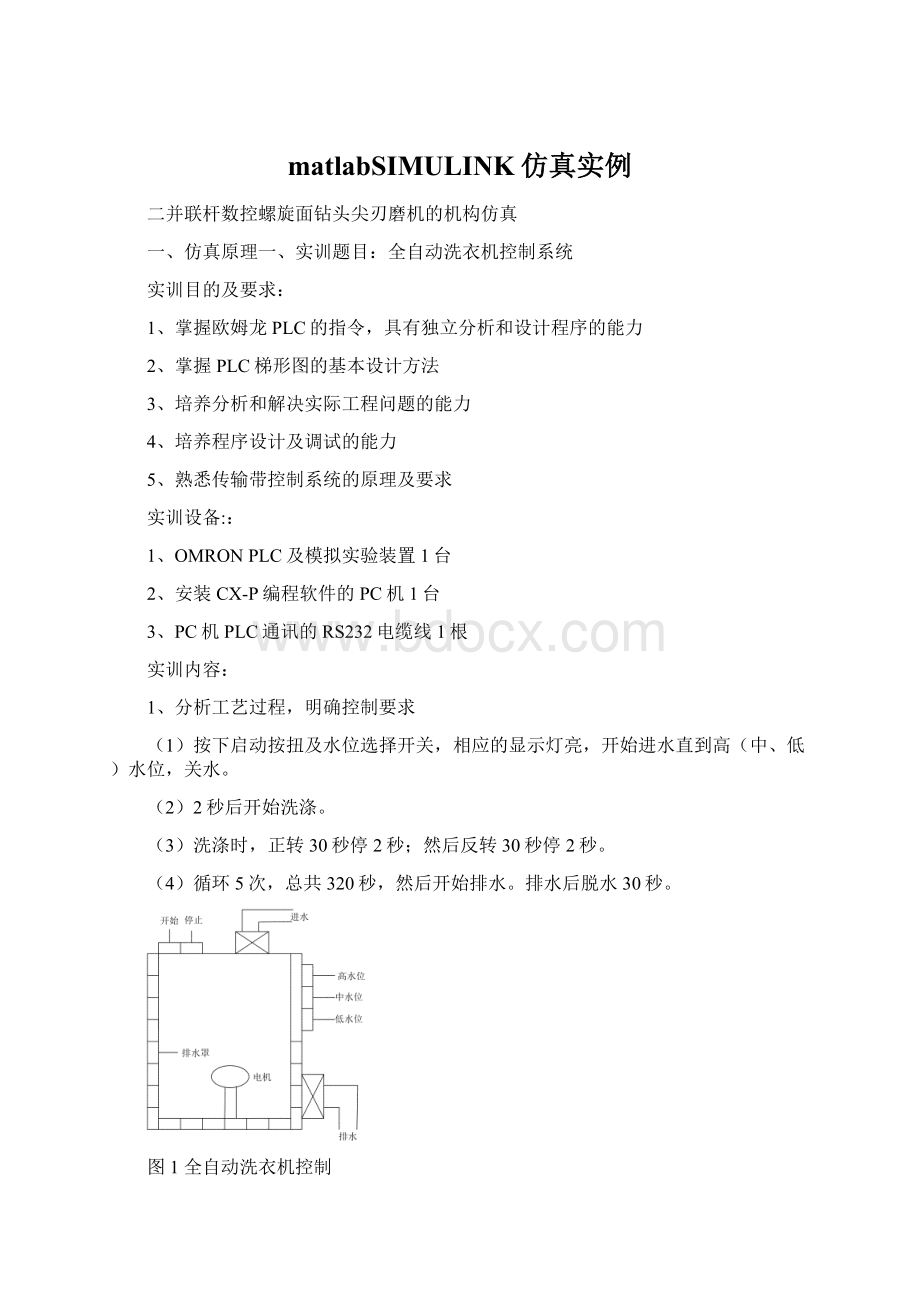
(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1全自动洗衣机控制
2、统计I/O点数并选择PLC型号
输入:
系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:
进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:
输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A型PLC就能满足此例的要求。
3、I/O分配
表1全自动洗衣机控制I/O分配表
输入
输出
地址
名称
地址
名称
00000
启动系统按钮
01000
排水显示灯
00001
高水位选择按钮
01001
脱水显示灯
00002
中水位选择按钮
01002
进、出水显示灯
00003
低水位选择按钮
01003
高水位显示灯
00004
排水液位传感器
01004
中水位显示灯
00005
停止系统按钮
01005
低水位显示灯
00006
高水位液位传感器
01006
电机正转显示灯
00007
中水位液位传感器
01007
电机反转显示灯
00008
低水位液位传感器
4、PLC控制程序设计及分析
实现功能:
当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
中间继电器20000为系统总启动。
实现功能:
当按下按钮00001,中间继电器20001得电并自锁;当中间继电器20002、20003、20004、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20001掉电。
实现功能:
当按下按钮00002,中间继电器20002得电并自锁;当中间继电器20001、20003、20005、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20002掉电。
实现功能:
当按下按钮00003,中间继电器20003得电并自锁;当中间继电器20001、20002、20006、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20003掉电。
实现功能:
当按下按钮00006且01002为ON时,中间继电器20004得电并自锁;当中间继电器20002、20003、20005、20006任意一个为ON,或按下停止按钮00005,或计数器CNT005为ON时,中间继电器20004掉电。
实现功能:
当按下按钮00007且01002为ON时,中间继电器20005得电并自锁;当中间继电器20001、20003、20004、20006任意一个为ON,或按下停止按钮00005,或计数器CNT005为ON时,中间继电器20005掉电。
实现功能:
当按下按钮00008且01002为ON时,中间继电器20006得电并自锁;当中间继电器20001、20002、20004、20005任意一个为ON,或按下停止按钮00005,或计数器CNT005为ON时,中间继电器20004掉电。
实现功能:
当中间继电器20004、20005、20006中任意一个为ON时,定时器TIM000开始定时,2秒后定时时间到,TIM000为ON;当中间继电器20004、20005、20006都为OFF时,定时器TIM000掉电。
实现功能:
当定时器TIM000为ON且中间继电器20008和定时器TIM004为OFF时,中间继电器20007为ON,同时定时器TIM001、TIM002、TIM003、TIM004开始定时,30秒后定时器TIM001定时时间到(即TIM001为ON),再过2秒定时器TIM002定时时间到(即TIM002为ON),当TIM002为ON后再过30秒定时器TIM003定时时间到(即TIM003为ON),之后再过2秒定时器TIM004定时时间到(即TIM004为ON);定时器TIM004为ON时,中间继电器20007、定时器TIM001、TIM002、TIM003、TIM004同时掉电,之后进行下一次循环。
当定时器TIM000为OFF或中间继电器20008为ON时,中间继电器20007、定时器TIM001、TIM002、TIM003、TIM004同时掉电。
实现功能:
当系统一上电,特殊继电器25315在第一个周期内导通为ON,计数器CNT005自动复位为OFF,当前值恢复为#5,当定时器TIM004为ON时,计数器CNT005计数一次,当计数满设定值时,其输出为ON且保持,当灯01001为ON或停止按钮00005为ON时,计数器CNT005自动复位为OFF。
实现功能:
当按下按钮00004且灯01000为ON时,中间继电器20008得电并自锁且定时器TIM006开始定时,定时30秒后,定时器TIM006为ON;TIM006常闭触点为OFF,中间继电器20008和定时器TIM006掉电。
实现功能:
当中间继电器20001为ON且中间继电器20004为OFF,或中间继电器20002为ON且中间继电器20005为OFF,或中间继电器20003为ON且中间继电器20006为OFF,这三种情况中的任意一种实现时,灯01002为ON;其他状态时,灯01002为OFF。
实现功能:
当中间继电器20001为ON时,灯01003为ON;当中间继电器20001为OFF时,灯01003为OFF。
实现功能:
当中间继电器20002为ON时,灯01004为ON;当中间继电器20002为OFF时,灯01004为OFF。
实现功能:
当中间继电器20003为ON时,灯01005为ON;当中间继电器20003为OFF时,灯01005为OFF。
实现功能:
当中间继电器20007为ON且定时器TIM001为OFF时,灯01006为ON;当中间继电器20007为OFF或定时器TIM001为ON时,灯01006为OFF。
实现功能:
当定时器TIM002为ON且定时器TIM003为OFF时,灯01007为ON;当定时器TIM002为OFF或定时器TIM003为ON时,灯01007为OFF。
实现功能:
当计数器CNT005为ON且中间继电器20008和灯01001为OFF时,灯01000为ON;当计数器CNT005为OFF或中间继电器20008为ON或灯01001为ON时,灯01000为OFF。
实现功能:
当中间继电器20008为ON时,灯01001为ON;当中间继电器20008为OFF时,灯01001为OFF。
图1二并联杆数控螺旋面钻头尖刃磨机床示意图
图2二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图
重要假设条件:
1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图
二、建立仿真方程
C2=cos(θ2)S2=sin(θ2)C3=cos(θ3)S3=sin(θ3)
一)力方程(分别对各个杆件进行受力分析)
对动平台4:
受力分析如图4
F24x+F43x=m4*Ac4x
(1)
F24y+F43y=m4*Ac4y
(2)
F24y*rc4-F43y*rc4=0(3)
图4动平台4的受力分析
对并联杆2:
受力分析如图5
F12x+F24x=-m2*Ac2x(4)
F12y+F24y=-m2*Ac2y(5)
F12x*rc2*S2+F12y*rc2*C2
-F24x*rc2*S2-F24y*rc2*C2=I2*α2(6)
图5并联杆2的受力分析
对直线电机滑块1:
受力分析如图6
Fm+F12x=m1*r1_dot_dot(7)
Fy=F12y(8)
图6直线电机滑块1的受力分析
对并联杆3:
受力分析如图7
F13x+F43x=-m3*Ac3x(9)
F13y+F43y=-m3*Ac3y(10)
F43x*r3*C3+F43y*r3*S3=I3*α3(11)
图7并联杆3的受力分析
二)闭环矢量运动方程(矢量图如图8)
图8闭环矢量图
矢量方程为:
R1+R2=R3+R4
将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:
r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3(12)
r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3(13)
三)质心加速度的矢量方程
图9质心加速度的矢量示意图
矢量关系:
Ac3=Rc3_dot_dot
Ac4=R3_dot_dot+Rc4_dot_dot
Ac2=R3_dot_dot+R4_dot_dot+Rc2_dot_dot
(_dot_dot表示对时间求两次导数)
将上述三个矢量方程分别分解为x和y方向,则它们等效为以下六个方程;
Ac3x=-rc3*w3^2*C3-rc3*α3*S3(14)
Ac3y=-rc3*w3^2*S3+rc3*α3*C3(15)
Ac4x=-r3*w3^2*C3-r3*α3*S3(16)
Ac4y=-r3*w3^2*S3+r3*α3*C3(17)
Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2(18)
Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2(19)
力未知量为:
F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm
引入的加速度有:
α2,α3,r1_dot_dot,Ac3x,Ac3y,Ac4x,Ac4y,Ac2x,Ac2y
三、系统方程的组装
将所有19个方程组装成矩阵形式
四、初始条件的设定
假设图3位置就是初始位置。
由于θ2+θ3=180度(3.14弧度),所以积分器初始值设为
θ2=1,θ3=2.14,r1=1.5,其它积分器初始值均设为0。
五、机构的仿真及其结果
根据上述矩阵方程建立的m文件和simulink文件见附录。
仿真结果:
1、并联杆2的运动参数曲线如图10
图10并联杆2的运动参数θ2,w2,α2曲线
2、并联杆3的运动参数曲线如图11
图11并联杆2的运动参数θ3,w3,α3曲线
3、直线电极滑块1的运动参数曲线如图12
图12直线电极滑块1的运动参数r1,r1_dot,
r1_dot_dot曲线
4、各个杆件内力曲线如图13
由图可知F24y与F43y的曲线重合,而实际上F24y,F43y是并联杆与动平台之间的内力,它们实际上也是相等的,所以曲线与实际情况相符。
图13各个杆件内力曲线
5、直线电机驱动力Fm与导轨对直线电机次子法向支持力Fy的曲线
图14Fm与Fy的曲线
6、并联杆2的质心加速度Ac2x,Ac2y曲线如图15
图15并联杆2的质心加速度Ac2x,Ac2y曲线
7、并联杆3的质心加速度Ac3x,Ac3y曲线如图16
图16并联杆3的质心加速度Ac3x,Ac3y曲线
8、动平台4的质心加速度Ac4x,Ac4y曲线如图17
图17动平台4的质心加速度Ac4x,Ac4y曲线
9、误差曲线
图18机构仿真误差随时间的变化曲线
M函数为
functione=my7(u)
%u
(1)=r1
%u
(2)=theta_2
%u(3)=theta_3
r2=1.0;
r3=1.0;
r4=0.5;
ex=u
(1)-r2*cos(u
(2))+r3*cos(u(3))-r4;
ey=r2*sin(u
(2))-r3*sin(u(3));
e=norm([exey]);
结论:
由误差曲线可以看出误差程周期变化,并且是收敛状态,所以仿真正确。
 升级会员
升级会员 