电子节拍器的设计与实现.docx
《电子节拍器的设计与实现.docx》由会员分享,可在线阅读,更多相关《电子节拍器的设计与实现.docx(49页珍藏版)》请在冰豆网上搜索。
电子节拍器的设计与实现
电子节拍器的设计与实现
学院:
明光桥北技术学院
班级:
18
姓名:
文熙
学号:
2333
班内序号:
666
1、设计思想
本实验采用自顶向下设计的方法。
从整体上考虑系统的功能,划分出不同的功能模块,然后选用器件实现相应模块,反复改进、反复实践,最终完成系统的设计。
在前期,我主要是进行各个模块的测试,分别测试完成之后,再通过顶层文件进行电路的连接,实现全部的设计。
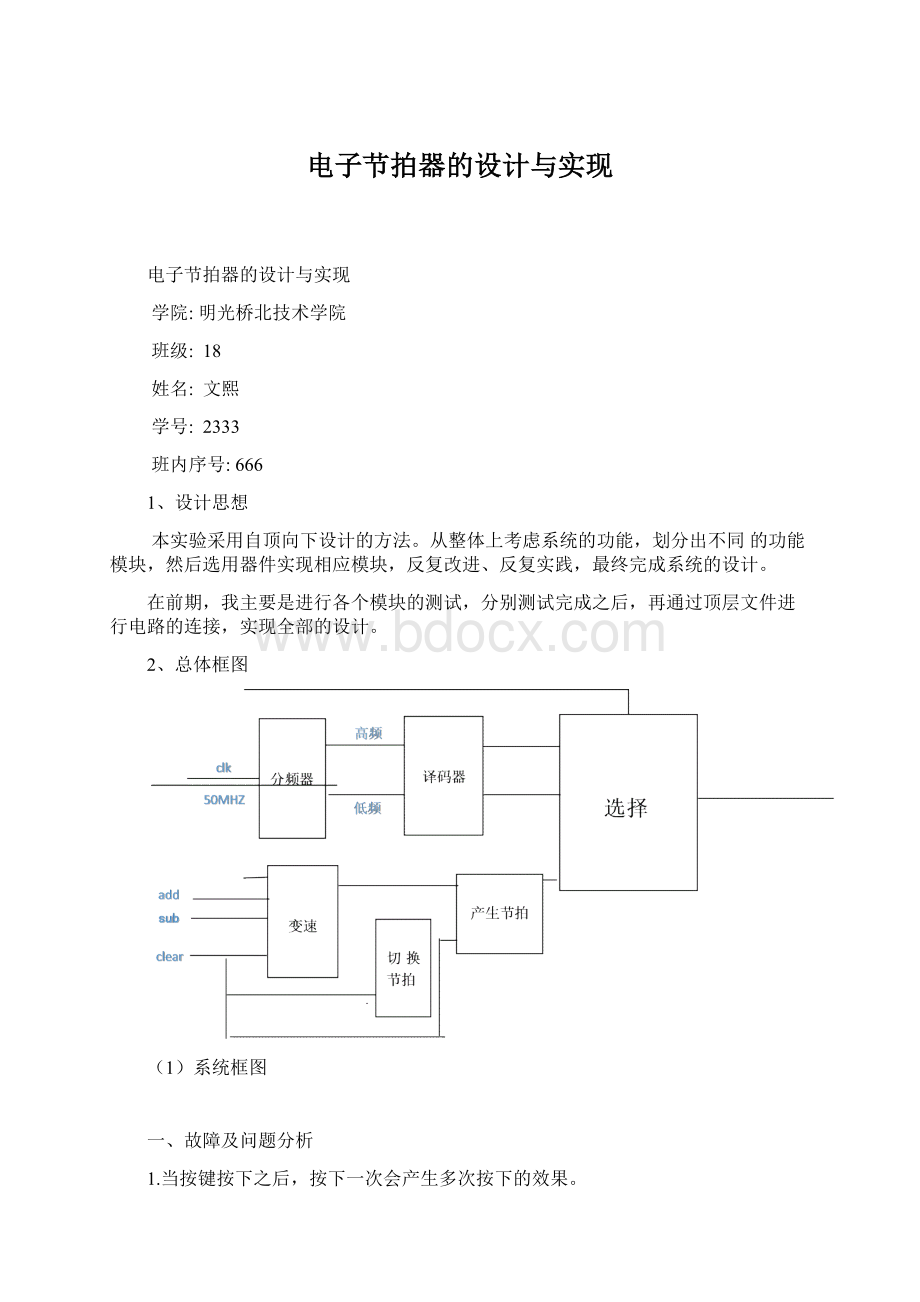
2、总体框图
(1)系统框图
一、故障及问题分析
1.当按键按下之后,按下一次会产生多次按下的效果。
问题分析与解决:
由于抖动的原因,需要加上一个防抖的程序。
2.速度加1加5的时钟计时时间偏小。
问题分析与解决:
通过实验室多次调试解决。
3.播放自制歌曲时无法进行节拍演示。
问题分析与解决:
case语句需要改进。
(由于此歌曲在验收实验前一天晚上才完成没有时间改进。
)
4.蜂鸣器一开始输入高低电平。
问题分析与解决:
后来查阅资料和同学沟通发现应该是输入不同频率的方波信号。
5.导致数码管显示不正常。
问题分析与解决:
对数码管扫描频率一开始过大,应该调整为10kHz
六、总结和结论
好人有好报----造福学弟学妹
七、源程序
顶层文件
libraryieee;
useieee.std_logic_1164.all;
useieee.std_logic_unsigned.all;
ENTITYjiepaiqiIS
PORT
(
add:
INSTD_LOGIC;
sub:
INSTD_LOGIC;
clk:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
state:
INSTD_LOGIC;
success:
instd_logic;
sw:
INSTD_LOGIC;
--sw1:
INSTD_LOGIC;
led1:
OUTSTD_LOGIC;
led2:
OUTSTD_LOGIC;
led3:
OUTSTD_LOGIC;
beeper0:
OUTSTD_LOGIC;
b:
OUTSTD_LOGIC_VECTOR(6DOWNTO0);
cat:
OUTSTD_LOGIC_VECTOR(5DOWNTO0)
);
ENDjiepaiqi;
ARCHITECTUREaOFjiepaiqiIS
COMPONENTbeeper
PORT(clk:
instd_logic;
clear:
instd_logic;
state:
instd_logic;
success:
instd_logic;
V1,V2,V3:
instd_logic;
show:
outstd_logic
);
ENDCOMPONENT;
COMPONENTfenpinqi
PORT(clk:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
S:
INSTD_LOGIC_VECTOR(6DOWNTO0);
speed:
OUTSTD_LOGIC;
ms:
OUTSTD_LOGIC
);
ENDCOMPONENT;
COMPONENTled
PORT(speed:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
J:
INSTD_LOGIC_VECTOR(2DOWNTO0);
V1:
OUTSTD_LOGIC;
V2:
OUTSTD_LOGIC;
V3:
OUTSTD_LOGIC
);
ENDCOMPONENT;
COMPONENTpace
PORT(sw:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
J:
OUTSTD_LOGIC_VECTOR(2DOWNTO0)
);
ENDCOMPONENT;
COMPONENTsmgymq
PORT(clk:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
J:
INSTD_LOGIC_VECTOR(2DOWNTO0);
S:
INSTD_LOGIC_VECTOR(6DOWNTO0);
b:
OUTSTD_LOGIC_VECTOR(6DOWNTO0);
cat:
OUTSTD_LOGIC_VECTOR(5DOWNTO0)
);
ENDCOMPONENT;
COMPONENTspeeder
PORT(add:
INSTD_LOGIC;
sub:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
clk:
INSTD_LOGIC;
S:
OUTSTD_LOGIC_VECTOR(6DOWNTO0)
);
ENDCOMPONENT;
COMPONENTfenpinqismg
PORT(clk:
INSTD_LOGIC;
clear:
INSTD_LOGIC;
clkout:
OUTSTD_LOGIC
);
ENDCOMPONENT;
SIGNALSW_0:
STD_LOGIC;
SIGNALSW_1:
STD_LOGIC;
SIGNALSW_2:
STD_LOGIC;
SIGNALSW_10:
STD_LOGIC_VECTOR(6DOWNTO0);
SIGNALSW_4:
STD_LOGIC;
SIGNALSW_11:
STD_LOGIC_VECTOR(2DOWNTO0);
SIGNALSW_6:
STD_LOGIC;
SIGNALSW_9:
STD_LOGIC;
BEGIN
led1<=SW_0;
led2<=SW_1;
led3<=SW_2;
u1:
beeper
PORTMAP(clk=>clk,
clear=>clear,
state=>state,
success=>success,
V1=>SW_0,
V2=>SW_1,
V3=>SW_2,
show=>beeper0);
u2:
fenpinqi
PORTMAP(clk=>clk,
clear=>clear,
S=>SW_10,
speed=>SW_4,
ms=>SW_9);
u3:
led
PORTMAP(speed=>SW_4,
clear=>clear,
J=>SW_11,
V1=>SW_0,
V2=>SW_1,
V3=>SW_2);
u4:
pace
PORTMAP(sw=>sw,
clear=>clear,
J=>SW_11);
u5:
smgymq
PORTMAP(clk=>SW_6,
clear=>clear,
J=>SW_11,
S=>SW_10,
b=>b,
cat=>cat);
u6:
speeder
PORTMAP(add=>add,
sub=>sub,
clear=>clear,
clk=>SW_9,
S=>SW_10);
u7:
fenpinqismg
PORTMAP(clk=>clk,
clear=>clear,
clkout=>SW_6);
ENDa;
数码管分频器
libraryieee;
useieee.std_logic_1164.all;
useieee.std_logic_unsigned.all;
entityfenpinqismgis
port(
clk,clear:
instd_logic;
clkout:
outstd_logic);
endfenpinqismg;
architectureaoffenpinqismgis
signaltemp:
integerrange0to2499;
signalclk_tmp:
std_logic;
begin
process(clk,clear)
begin
ifclear='0'then
temp<=0;
clk_tmp<='0';
else
ifclk'eventandclk='1'then
iftemp=2499then
temp<=0;
clk_tmp<=notclk_tmp;
else
temp<=temp+1;
endif;
endif;
endif;
clkout<=clk_tmp;
endprocess;
end;
速度调节
libraryieee;
useieee.std_logic_1164.all;
useieee.std_logic_unsigned.all;
entityspeederis
port(
add,sub,clear,clk:
instd_logic;
S:
outstd_logic_vector(6downto0));
endspeeder;
architectureaofspeederis
signalS_temp:
std_logic_vector(6downto0);
signaltime1a:
integerrange0to2000;
signaltime1b:
integerrange0to2000;
signaltime2a:
integerrange0to2000;
signaltime2b:
integerrange0to2000;
begin
process(clk)
begin
if(clk'eventandclk='1')then
-----------add----------
ifS_temp<"1010000"then--节奏速度小于120
if(add='0')then
time1a<=0;
time1b<=0;
elsif(add='1'andtime1a=2000andS_temp<"1001100")then--节奏速度小于115按键1秒速度+5
S_temp<=S_temp+5;
time1a<=0;
elsif(add='1'andtime1b=0)then
S_temp<=S_temp+1;
time1b<=time1b+1;
elsif(add='1'andtime1a<2000)then
time1a<=time1a+1;
endif;
endif;
----------sub----------
ifS_temp>"0000000"then--节奏速度大于40
if(sub='0')then
time2a<=0;
time2b<=0;
elsif(sub='1'andtim
 升级会员
升级会员 