自动变速器动力传递路线分析.docx
《自动变速器动力传递路线分析.docx》由会员分享,可在线阅读,更多相关《自动变速器动力传递路线分析.docx(11页珍藏版)》请在冰豆网上搜索。
自动变速器动力传递路线分析
自动变速器动力传递路线分析
(一)
.自动变速器动力传递概述
自动变速器由液力元件、变速机构、控制系统、主传动部件等几大部分组成。
变速机构可分为固定平行轴式、行星齿轮式和金属带式无级自动变速器(CVT)三种。
我国在用的车辆中,
大多数自动变速器都采用行星齿轮式变速机构,这也是本文重点分析的对象。
行星齿轮机构一般由2个或2个以上行星齿轮组按不同的组合方式构成,其作用是通过对不同部件的驱动或制动,
产生不同速比的前进挡、倒挡和空挡。
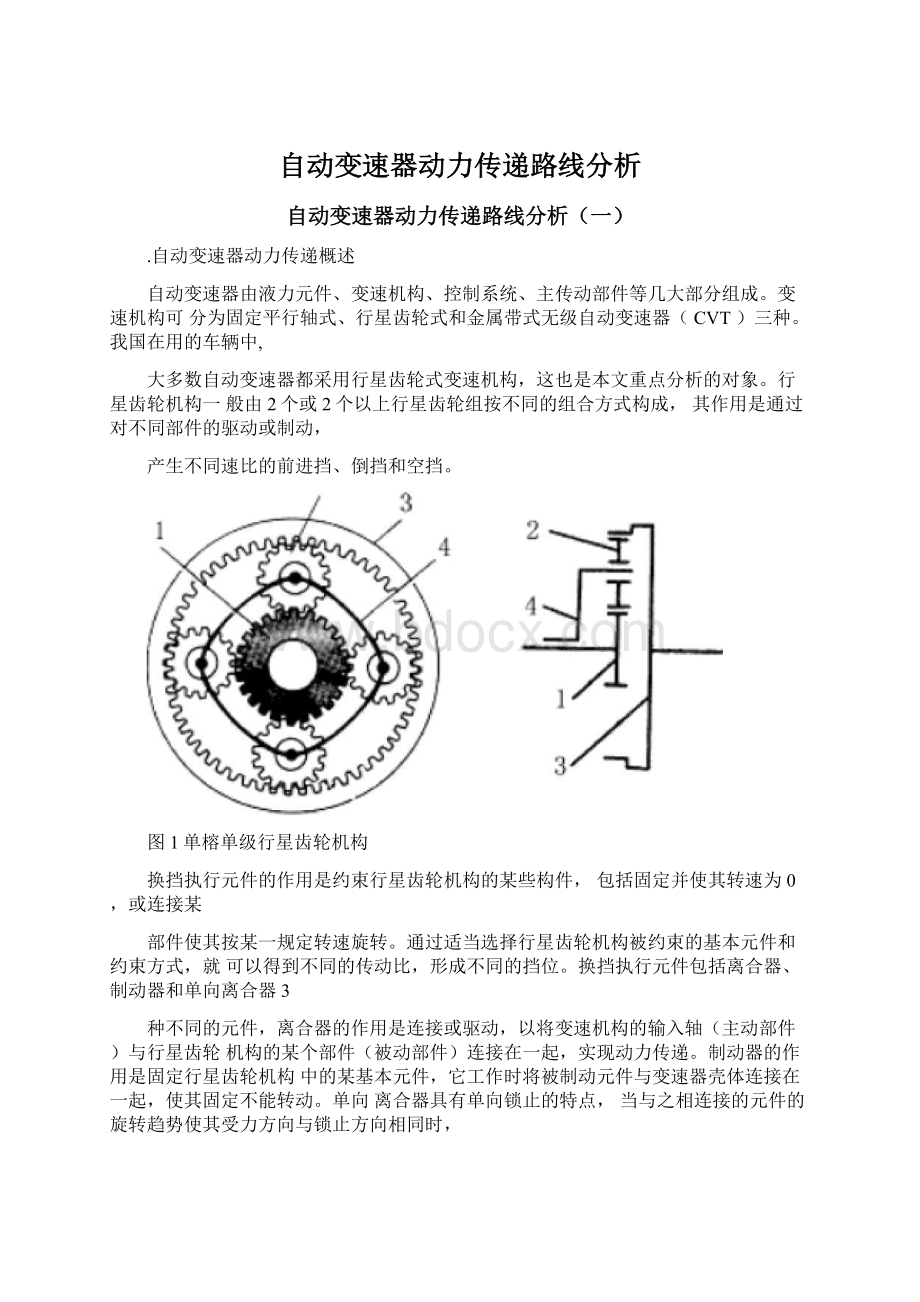
图1单榕单级行星齿轮机构
换挡执行元件的作用是约束行星齿轮机构的某些构件,包括固定并使其转速为0,或连接某
部件使其按某一规定转速旋转。
通过适当选择行星齿轮机构被约束的基本元件和约束方式,就可以得到不同的传动比,形成不同的挡位。
换挡执行元件包括离合器、制动器和单向离合器3
种不同的元件,离合器的作用是连接或驱动,以将变速机构的输入轴(主动部件)与行星齿轮机构的某个部件(被动部件)连接在一起,实现动力传递。
制动器的作用是固定行星齿轮机构中的某基本元件,它工作时将被制动元件与变速器壳体连接在一起,使其固定不能转动。
单向离合器具有单向锁止的特点,当与之相连接的元件的旋转趋势使其受力方向与锁止方向相同时,
该元件被固定(制动)或连接(驱动);当受力方向与锁止方向相反时,该元件被释放(脱离连接)。
由此可见,单向离合器在不同的状态下具有与离合器、制动器相同的作用。
由以上介绍可知,掌握不同组合行星齿轮机构的运动规律是自动变速器故障诊断的基础。
舉1不同掏件辙化前和转化后的转速
构件
名称
转化朗转腐
I
nv
打一1耳
3
行堪架
if=n:
7-nN=n
.单排单级行星齿轮机构
1.单排单级行星齿轮机构的传动比
最简单的行星齿轮机构由一个太阳轮、一个内齿圈和一个行星架组成,我们称之为一个单排单级行星排,如图1所示。
由于单排行星齿轮机构具有两个自由度,为了获得固定的传动比,需将太阳轮、齿圈或行星架三者之一制动(转速为0)或约束(以某一固定的转速旋转),以获
得我们所需的传动比;如果将三者中的任何两个连接为一体,则整个行星齿轮机构以同一速度旋转。
目前,在有关自动变速器的资料中,有关传动比的计算公式有以下几个:
(n1-nH)/(n3-nH)=-Z3/Z1式
(1)
式中:
n1-太阳轮转速;nH-行星架转速;n3-内齿圈转速;Z1-太阳轮齿数;Z3-内齿圈齿数n1+an2(1+a)n3=0式
(2)
式中:
n1-太阳轮转速;n2-内齿圈转速;n3-行星架转速;aH内齿圈齿数/太阳轮齿数=Z2/Z1Z2=Z1+Z3式(3)
式中:
Z1-太阳轮齿数;Z2-行星架假想齿数;Z3-内齿圈齿数
下面对这3个公式的原理与推导过程作以介绍,这也是本文后面对不同型号自动变速器速比
计算方法的基础。
定轴轮系齿轮传动比计算公式为i=(-1)m(所有的从动齿轮数乘积)/(所
有的主动齿轮数乘积)=(-1)mZn/Z1,它对行星齿轮机构是不适用的。
因为在行星齿轮机构中,
星轮在自转的同时,还随着行星架的转动而公转,这使得定轴轮系传动比的计算方法不再适用。
我们可以用相对速度法”或转化机构法”对行星齿轮机构的传动比进行分析,这一方法的理论依据是一个机构整体的绝对运动并不影响其内部各构件间的相对运动”这就好象手表表针的
相对运动并不随着人的行走而变化一样,这一理论是一位名叫Willes的科学家于1841年提出的。
假定给整个行星轮系加上一个绕支点O旋转的运动(-3),这个运动的角速度与行星架转动的
角速度(3相同,但方向相反,这时行星架静止不动,使星轮的几何轴线固定,我们就得到了一个定轴轮系,这样就能用定轴轮系的方法进行计算了。
用转速n代替角速度3,nbsp;禾U用
定轴轮系传动比计算公式有:
i13H=n1H/n3H=(n1-nH)/(n3-nH)=(-1)1Z2Z3/Z1Z2=-Z3/Z1
式(4)
如果把a=Z2/Z代入原公式(4)中,可得到式
(2)或式(3)。
由此可见,这3个公式其实是同一个公式的不同表达方式。
2.单排单级行星齿轮机构行星架的假想齿数
在式(4)中,假设固定内齿圈,使n3=0,代入式(5)得式(6):
n1/nH=(Z1+Z3)/Z1式(5)
又:
i1H=n1/nH=ZH/Z1式(6)
联解式(5)、(6)可得出:
ZH=Z1+Z3
即行星架的假想齿数是太阳轮齿数和内齿圈齿数之和”注意,这一结论只适用于单级行
星齿轮机构,在双级行星齿轮系就不适用了。
3•单排单级行星齿轮机构运动状态分析
(1)太阳轮固定(n仁0),行星架驱动,内齿圈输出:
将n1=0代入式(4),有i=nH/n3=Z3/(Z1+Z3),传动比小于1,即为同向增速运动。
(2)太阳轮固定(n仁0),内齿圈驱动,行星架输出:
将n1=0代入式(4),有i=n3/nH=(Z1+Z3)/Z3,传动比大于1,即为同向减速运动。
(3)齿圈固定(n3=0),行星架驱动,太阳轮输出:
将n3=0代入式(4),有i=nH/n1=Z1/(Z1+Z3),传动比小于1,即为同向增速运动。
(4)齿圈固定(n3=0),太阳轮驱动,行星架输出:
将n3=0代入式(4),有i=n1/nH=(Z1+Z3)/Z1,传动比大于1,即为同向减速运动。
(5)行星架固定(nH=0),齿圈驱动,太阳轮输出:
将nH=0代入式(4),有i=n3/n1=-Z1/Z3,传动比小于1,且为负值,即为反向增速运动。
(6)行星架固定(nH=0),太阳轮驱动,齿圈输出:
将nH=0代入式(4),有i=n1/n3=-Z3/Z1,传动比大于1,且为负值,即为反向减速运动。
现将单排单级行星齿轮机构在不同状态下的旋转速度和方向总结于表2。
图2单排取绳疔晏齿鸵机构
三.单排双级行星齿轮机构
1.单排双级行星齿轮机构的传动比
单排双级行星齿轮机构与单排单级行星齿轮机构相比,多了一只啮合齿轮,如图2所示。
同样根据转换法,对于多级啮行星齿轮系,我们通过单排单级行星齿轮机构传动比的计算
公式,可以推出如下公式:
iGKH=nGH/nKH=(nG-nH)/(nK-nH)=
(-1)m(从G到K所有的从动齿轮数乘积)/(从G到K所有的主动齿轮数乘积),(式中m为从G到K啮合齿轮的对数)式(7)
对于单排双级行星齿轮机构,m=2,从式(7)我们可以得出单排双级行星齿轮机构的运动
方程式为:
i13H=n1H/n3H=(nnH)/(n3-nH)=(-1)2Z2Z3/Z1Z2=Z3/Z1式(8)
2.单排双级行星齿轮机构行星架的假想齿数
在式(8)中,假设固定内齿圈,使n3=0,代入式(8)得式(9):
n1/nH=(Z3-Z1)/Z1式(9)
又:
i1H=n1/nH=ZH/Z1式(10)
联解式(9)、(10)可得出:
ZH=Z3-Z1
即单排双级行星齿轮机构中,行星架的假想齿数是内齿圈齿数减去太阳轮齿数。
可见,单排双级行星齿轮机构的速比计算公式和行星架的假想齿数与单排单级行星齿轮机构是不同的,这一点在本文后面不同车型自动变速器复杂行星齿轮机构传动比的计算时非常重要。
3.单排双极行星齿轮机构运动状态分析
对于单排双级行星齿轮机构,有Z3>Z1,(Z3-Z1)<乙3,但(Z3-Z1)与Z1的大小比较
不确定,所以在下面的旋转规律分析中,有些条件不具备的情况没有列出增速还是减速。
(1)太阳轮固定(n仁0),行星架驱动,内齿圈输出:
将n1=0代入式(8),有i=nH/n1=Z1/(Z1-Z1),传动比大于1且为正,即为同向减速运动。
(2)太阳轮固定(n仁0),内齿圈驱动,行星架输出:
将n1=0代入式(8),有i=n1/nH=
(Z3-Z1)/Z3,传动比小于1且为正,即为同向增速运动。
(3)齿圈固定(n3=0),行星架驱动,太阳轮输出:
将n3=0代入式(8),有i=nH/n仁-Z1/
(Z3-Z1),传动比为负,但是大于还是小于1不确定,故为反向运动。
(4)齿圈固定(n3=0),太阳轮驱动,行星架输出:
将n3=0代入式(8),有i=n1/nH=-(Z3-Z1)
/Z1,传动比为负,但是否大于或小于1不确定,故为反向运动。
(5)行星架固定(nH=0),齿圈驱动,太阳轮输出:
将nH=0代入式(8),有i=n3/n仁Z1/Z3,传动比小于1,且为正值,即为同向增速运动。
(6)行星架固定(nH=0),太阳轮驱动,齿圈输出:
将nH=0代入式(8),有i=n1/n3=Z3/Z1,传动比大于1,且为正值,即为同向减速运动。
现将单排双级行星齿轮机构的旋转速度和方向总结于表3。
对于单排双级行星齿轮机构,有
Z3>Z1,(Z3-Z1)草排单曇行星齿轮机构的运动垠律
囚泄件
E动杵
转速
转向
fTM.®
冋向
Iflife
咸速
网向
同向一
词向
反向
单排皿纽徐■齿轮机构的se挡卷虞和育向
4:
功件
U4H
转向
行宦琵
M向
[山向
蚊简
不确定
1讪向
同圖
四.复杂行星齿轮机构
由以上行星齿轮机构传动比分析可知,简单的行星齿轮机构不能满足汽车行驶时对不同速
比的要求,因此在实际应用中常常采用多个单排行星齿轮机构进行串、并联或换联主从动构件的方法组成更为复杂的行星齿轮机构,来满足汽车行驶挡位的需要。
将两个单排单级行星齿轮机构组合起来形成的双排单级行星齿轮机构,称为辛普森结构;将一个单排单级行星齿轮机构和一个单排双级行星齿轮机构或由两个单排双级行星齿轮机构按特定的方式组合起来,称为拉维那式行星齿轮机构。
以上介绍的是简单的行星齿轮机构的运动规律分析及传动比的计算方法,实际应用的复杂行星齿轮机构将在各车型动力传递分析中介绍。
赛欧AF13型自动变速器动力传递路线分析
上海通用别克赛欧装备的AF13型自动变速器是日本AisinAW公司生产的产品,该型自动
变速器在AisinAW公司内部的识别号为60-40LE°AF13自动变速器的主要规格参数见表1。
AF13自动变速器采用拉维那式行星齿轮机构,它将一个单排单级行星齿轮机构和一个单排双级行星齿轮机构按特定的方式组合起来,如图1所示。
AF13自动变速器换挡执行元件包
括4个离合器、2个制动器和2个单向离合器,换挡执行元件名称及作用见表2。
因资料来
源不同,AF13自动变速器同一换挡执行元件可能有不同的名称,本文都有采用,只要其英文缩写一致就是同一元件。
由图1可知,AF13自动变速器前端(右侧)是一个单排双级行星齿轮机构,后端(左侧)是一个单排单级行星齿轮机构,它们共用一个行星架。
其前、后排太阳轮相连为一体,齿数
不同,但是转速相同。
行星齿轮机构共有4个可运动部件,分别为:
后排(小)内齿圈、大
/小太阳轮(前/后一体)、前排(大)内齿圈、输出行星架(前/后共用,为动力输出部件),
因输出行星架是动力输出端,它既不能固定也不能驱动。
在不同挡位,各部件的状态见表3。
赛欧AF13型自动变速器动力传递路线分析
AF13自动变速器动力传递示意图如图2所示;不同挡位时,各换挡执行元件的状态见表4。
利用单排单级和单排双级行星齿轮机构传动比计算方程式,分别代入前、后排行星齿轮系,得出如下方程组:
(n11-n1H)/(nlnlH)=-Z13/Z11..式
(1)
(n21-n2H)/(n2n2H)=Z23/Z21式
(2)
式中:
n11-前排太阳轮转速;n1H-前排行星架转速;n13-前排内齿圈转速;Z11=26-前排太阳轮齿数26;Z13=98-前排齿圈的齿数98;n21-后排太阳轮转速;n2H-后排行星架转速;n23-后排内齿圈转速;Z21=35-后排太阳轮齿数;Z23=73-后排齿圈的齿数
赛欧AF13型自动变速器动力传递路线分析
发布时间:
2009-12-0211:
59|编辑:
汽车乐QiC|查看:
89次来源:
网络
因前、后排行星齿轮机构共用一个行星架(动力输出端),故有:
n1H=n2H
因前/后行星排的太阳轮为一体,虽然齿数不同,但是转速相同,故有:
n1仁n21
根据表3各部件状态及齿数,联解方程
(1)和
(2)即可求出不同挡位的传动比。
一、1挡动力传递路线分析
1.D、3、2位之1挡
1挡动力传递路线如图3所示。
输入轴顺时针旋转,前进挡离合器C1结合t惯性离合
器C3结合,同时单向离合器F0锁止t3驱动后排齿圈顺时针旋转t太阳轮逆时针旋转t单向离合器F1锁止,防止前排齿圈逆时针旋转t行星架顺时针减速旋转。
在D之1挡,单向离合器F1锁止,防止前排齿圈逆时针旋转”是动力传递不可缺少的条件,所以它没有发动
机制动。
由以上分析可知,1挡驱动小内齿圈,行星架输出,固定大内齿圈,即n13=0,则传动比为:
i=n23/n2H=(Z21Z13+Z23Z11)/Z23Z11
=(3430+1898)/1898=2.807165
2.手动1挡
手动1挡动力传递路线如图4所示。
在手动1挡,第1、倒挡制动器B2工作,双向固定前排齿圈,有发动机制动作用。
二、2挡动力传递路线分析
2挡动力传递路线如图5所示。
2挡时,输入轴顺时针旋转,前进挡离合器C1结合t
惯性离合器C3结合,同时单向离合器F0锁止t后排齿圈顺时针旋转t第2/4挡制动器B1工作,防止太阳轮旋转t行星架顺时针减速旋转。
ffil行星皆轮机均与換掛执行元件
I-舀折星撤2-3-呼水翌無(4-fi%-烁韬=@血內血磁com吨丰乐
5-轨谢闻动爲宦岳〔mn
無件g趴c?
-ih.s^^as.L.i-n
in-wI圖打報动納fo-单向
AfrfrtPO,
赛欧AF13型自动变速器动力传递路
线分析
由以上分析可知,2挡驱动部件为小内齿圈,固定部件为大/小太阳轮,即n1仁n2仁0,
则传动比为:
i=n23/n2H=(Z21+Z23)/Z23
=(35+73)/73=1.479452
三、3挡动力传递路线分析
3挡动力传递路线如图6所示。
3挡时,前、后排齿圈同时驱动,整个行星齿轮机构以一个整体旋转,为直接挡,传动比是1:
1。
后排齿圈动力传递路线是:
输入轴顺时针旋转,
前进挡离合器C1结合t惯性离合器C3结合,同时单向离合器F0锁止t后排齿圈顺时针旋转。
前排齿圈动力传递路线是:
输入轴顺时针旋转,前进挡离合器C1结合t超速离合器
CO结合t前排齿圈顺时针旋转。
四、4挡动力传递路线分析
4挡动力传递路线如图7所示。
4挡时,输入轴顺时针旋转,前进挡离合器C1结合t
超速离合器CO结合t前排齿圈顺时针旋转t第2/4挡制动器B1工作,防止太阳轮旋转t
行星架顺时针超速旋转。
由以上分析可知,4挡驱动部件为大内齿圈,固定部件为大/小太阳轮,即n11=n21=0,
则传动比为:
i=n13/n1H=(Z14-Z11)/Z13
=(98-26)/98=0.734694
@5空挡动力传诵路线
•呕动■固定
0B31挡动力传递路线
 升级会员
升级会员 