嵌入式综合设计.docx
《嵌入式综合设计.docx》由会员分享,可在线阅读,更多相关《嵌入式综合设计.docx(18页珍藏版)》请在冰豆网上搜索。
嵌入式综合设计
基于STM32F4的姿态解算系统
摘要:
本实验主要利用的基于STM32F4开发板上MUP6050陀螺仪加速度计来做四元素的更新和四元素的姿态解算系统,开发平台为keiluvision5。
主要实现MPU6050自带数字运动处理DMP的四元素与自己编写的三子样旋转矢量算法对比的目的。
将MPU6050输出的原始数据和姿态解算数据通过串口上传到四轴上位机进行3D仿真,和用LCD屏进行数据的实时显示,并且用一个LED灯显示系统的运行和一个开关控制数据是否上传上位机。
程序是在UCOSIII操作系统中实现,建立了一个定时器,五个任务。
定时器实现四元素更新的三子样算法和姿态解算;开始任务负责创建任务;任务一实现开关对数据上传控制;任务二实现上传MPU6050输出数据和自己解算姿态到上位机;任务三实现MPU6050的四元素读取并显示到LCD上;任务四负责LCD数据和字符的显示。
关键字:
MPU6050;四元素;姿态解算;UCOSIII
1引言
现在MEMS陀螺仪和加速的计价格便宜,精度虽不如光纤和激光陀螺,但是它以价格便宜体积重量小等优势占据一定的地位,它应用的领域主要在民用手机导航小型飞行器当中。
基于MEMS惯性元件的导航可应用于个人的导航和小型飞行器的导航,研究MEMS陀螺导航具有一定的实用价值。
本实验主要利用的基于STM32F4开发板上MUP6050陀螺仪加速度计来做四元素的更新和四元素的姿态解算,开发平台为keiluvision5,将数据通过串口上传到四轴上位机进行3D仿真,并用LCD屏进行数据的实时显示。
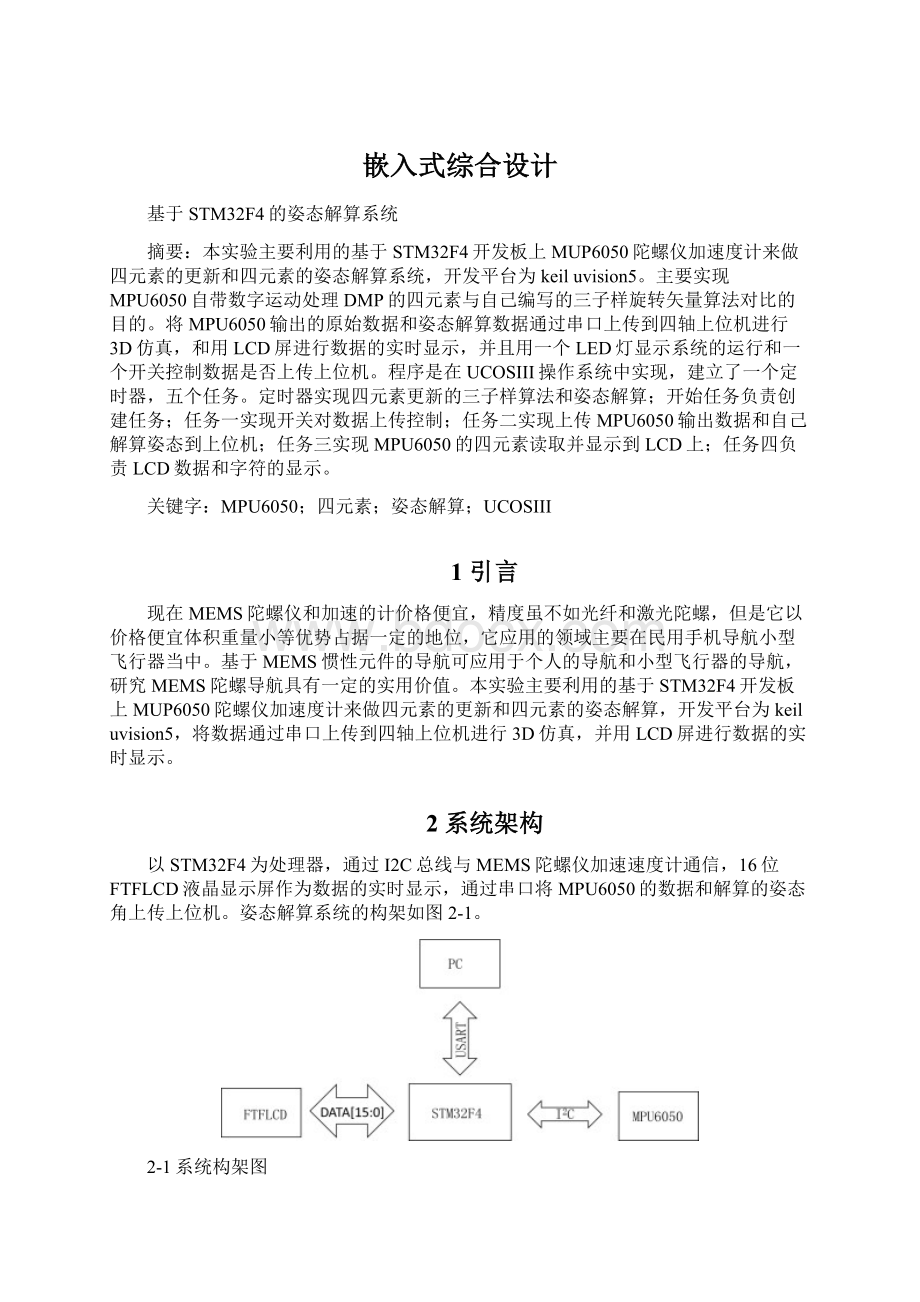
2系统架构
以STM32F4为处理器,通过I2C总线与MEMS陀螺仪加速速度计通信,16位FTFLCD液晶显示屏作为数据的实时显示,通过串口将MPU6050的数据和解算的姿态角上传上位机。
姿态解算系统的构架如图2-1。
2-1系统构架图
系统的功能:
(1)将STM32F4读取的MPU6050的数据上传上位机
(2)解算姿态角,上传四轴上位机进行仿真,并在LCD上实时显示姿态角。
(3)读取MPU6050的四元素并在LCD上显示。
(4)解算使用三子样四元素更新算法解算姿态角,并在LCD上显示。
3软硬件设计
3.1硬件设计
本实验所要用到的硬件资源如下:
1)指示灯DS0
2)KEY0按键
3)TFTLCD模块
4)串口
5)MPU6050
指示灯:
用到的指示灯DS0,位共阳型,连接到STM32F4的PF9引脚。
如图3-1所示。
图3-1SD0与STM32连接原理图
按键:
KEY0按下引脚PE4接上低电平。
判断PE4上的电平就可以知道按键的状态。
如图3-2所示。
3-2按键与STM32F4的连接原理图
TFTLCD模块:
4.3寸,分辨率为800*480,16真彩显示。
其与STM32F4的连接如图3-3所示。
引脚含义:
CS:
TFTLCD片选信号。
WR:
向TFTLCD写入数据。
RD:
从TFTLCD读取数据。
D[15:
0]:
16位双向数据线。
RST:
硬复位TFTLCD。
RS:
命令/数据标志(0,读写命令;1,读写数据)。
图3-3TFTLCD与STM32F4的连接原理
MPU6050:
MPU6050内部整合了3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP:
DigitalMotionProcessor)硬件加速引擎,通过主IIC接口,向应用端输出完整的9轴融合演算数据。
MPU6050与STM32F4的连接如图3-4所示。
图3-4MPU6050与STM32F4的连接原理图
3.2软件设计
3.2.1底层驱动部分
程序的实现是在UCOSIII实时操作系统上实现,但是在使用操作系统前必须写好指示灯DS0、KEY0按键、TFTLCD模块、串口以及MPU6050的驱动,还有系统的移植。
本设计是在已经移植好的UCOSIII操作系统上进行的,所以就对UCOSIII移植到STM32F4上不做说明。
工程文件夹下的文件HARDWARE文件夹存放的是驱动文件,其中有IIC、KEY、LCD、LED、MPU6050文件分别是I2C、按键KEY、LCD、LED和MPU6050的驱动文件,如图4-1所示。
其中的UCOSIII文件夹为UCOSIII操作系统文件。
图4-1工程文件
LED文件夹中的led.c和led.h主要是对GPIO口和使能对应的GPIO时钟的操作。
KEY文件夹中的key.c和key.h主要是先初始化对应的GPIO口和实现一个按键扫描函数KEY_Scan()。
//mode:
0,不支持连续按;1,支持连续按;
//返回值1表示,KEY0按下
//注意此函数有响应优先级,KEY0>KEY1>KEY2>WK_UP!
!
u8KEY_Scan(u8mode)
{
staticu8key_up=1;//按键按松开标志
if(mode)key_up=1;//支持连按
if(key_up&&(KEY0==0||KEY1==0||KEY2==0||WK_UP==1))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY0==0)return1;
elseif(KEY1==0)return2;
elseif(KEY2==0)return3;
elseif(WK_UP==1)return4;
}elseif(KEY0==1&&KEY1==1&&KEY2==1&&WK_UP==0)key_up=1;
return0;//无按键按下
}
在IIC文件夹中的myiic.c和myiic.h主要实现I2C读和写一个字节,IIC_Read_Byte()和IIC_Send_Byte()。
由于大家对I2C总线比较熟悉就不做多说明。
LCD文件夹中lcd.c和lcd.h主要实现一些对LCD屏的操作的函数。
用到的主要有LCD_ShowString/LCD_ShowxNum()/LCD_ShowNum()。
//显示数字,高位为0,则不显示
//x,y:
起点坐标
//len:
数字的位数
//size:
字体大小
//color:
颜色
//num:
数值(0~4294967295);
voidLCD_ShowNum(u16x,u16y,u32num,u8len,u8size);//显示一个数字
//显示数字,高位为0,还是显示
//x,y:
起点坐标
//num:
数值(0~999999999);
//len:
长度(即要显示的位数)
//size:
字体大小
//mode:
//[7]:
0,不填充;1,填充0.
//[6:
1]:
保留
//[0]:
0,非叠加显示;1,叠加显示.
voidLCD_ShowxNum(u16x,u16y,u32num,u8len,u8size,u8mode);//显示数字
//显示字符串
//x,y:
起点坐标
//width,height:
区域大小
//size:
字体大小
//*p:
字符串起始地址
voidLCD_ShowString(u16x,u16y,u16width,u16height,u8size,u8*p);//显示一个字符串,12/16字体
MPU6050中的文件mpu6050.c和mpu6050.h实现mpu6050的驱动。
只要对mpu6050的一些基本的设置和初始化以及数据的读取。
u8MPU_Init(void)
{
u8res;
IIC_Init();//初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80);//复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00);//唤醒MPU6050
MPU_Set_Gyro_Fsr(3);//陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0);//加速度传感器,±2g
MPU_Set_Rate(50);//设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00);//关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00);//I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00);//关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80);//INT引脚低电平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01);//设置CLKSEL,PLLX轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00);//加速度与陀螺仪都工作
MPU_Set_Rate(50);//设置采样率为50Hz
}elsereturn1;
return0;
}
//得到温度值
//返回值:
温度值(扩大了100倍)
shortMPU_Get_Temperature(void)
//得到陀螺仪值(原始值),16位AD采集的值
//gx,gy,gz:
陀螺仪x,y,z轴的原始读数(带符号)
//返回值:
0,成功/其他,错误代码
u8MPU_Get_Gyroscope(short*gx,short*gy,short*gz)
//得到加速度值(原始值)
//gx,gy,gz:
陀螺仪x,y,z轴的原始读数(带符号),16位AD采集的值
//返回值:
0,成功;其他,错误代码
u8MPU_Get_Accelerometer(short*ax,short*ay,short*az)
//获得四元素
u8MPU_Get_Quaternion(float*quat)
//得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
//pitch:
俯仰角精度:
0.1°范围:
-90.0°<--->+90.0°
//roll:
横滚角精度:
0.1°范围:
-180.0°<--->+180.0°
//yaw:
航向角精度:
0.1°范围:
-180.0°<--->+180.0°
//返回值:
0,正常;其他,失败
u8mpu_dmp_get_data(float*pitch,float*roll,float*yaw)
3.2.2基于UCOSIII操作系统部分
程序是在UCOSIII操作系统中实现,建立了一个定时器,五个任务。
定时器实现四元素更新的三子样算法和姿态解算,其优先级为2,堆栈大小为256;开始任务负责创建定时器和其他四个任务,其优先级为3,堆栈大小为128;任务一实现开关对数据上传控制,优先级为4,堆栈大小为256;任务二实现上传MPU6050输出数据和自己解算姿态到上位机,其优先级为5,堆栈大小为256;任务三实现MPU6050的四元素读取并显示到LCD上,其优先级为6,堆栈大小为128;任务四负责LCD数据和字符的显示,其优先级为7,堆栈大小为128。
Main函数中主要是初始化硬件资源和UCOSIII操作系统以及创建开始任务和开始UCOSIII操作系统。
intmain(void)
{
OS_ERRerr;
CPU_SR_ALLOC();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168);//初始化延时函数
uart_init(500000);//初始化串口波特率为500000
LED_Init();//初始化LED
KEY_Init();//初始化按键
LCD_Init();//LCD初始化
MPU_Init();//初始化MPU6050
Show_Main_UI();//在LCD上显式界面
OSInit(&err);//初始化UCOSIII
OS_CRITICAL_ENTER();//进入临界区
//创建开始任务
OSTaskCreate((OS_TCB*)&StartTaskTCB,//任务控制块
(CPU_CHAR*)"starttask",//任务名字
(OS_TASK_PTR)start_task,//任务函数
(void*)0,//传递给任务函数的参数
(OS_PRIO)START_TASK_PRIO,//任务优先级
(CPU_STK*)&START_TASK_STK[0],//任务堆栈基地址
(CPU_STK_SIZE)START_STK_SIZE/10,//任务堆栈深度限位
(CPU_STK_SIZE)START_STK_SIZE,//任务堆栈大小
(OS_MSG_QTY)0,//任务内部消息队列能够接收的最大消息数目,为0时禁止接收消息
(OS_TICK)0,//当使能时间片轮转时的时间片长度,为0时为默认长度,
(void*)0,//用户补充的存储区
(OS_OPT)OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,//任务选项
(OS_ERR*)&err);//存放该函数错误时的返回值
OS_CRITICAL_EXIT();//退出临界区
OSStart(&err);//开启UCOSIII
}
开始任务start_task(),在创建了一个时钟和四个任务后将自己删除。
用一个全局的变量report来表示数据上传串口开关的状态,当report=1时表示开启上传,report=0是表示停止上传。
开始默认是开启上传的,即report=1,当按键KEY0按下时翻转report的值,即可达到开启和关闭数据上传串口的目的。
if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定义帧发送加速度和陀螺仪原始数据
if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
任务一的函数如下每隔100ms进行扫描一次。
voidtask1_task(void*p_arg)
{
OS_ERRerr;
u8key;
LED1=0;
while
(1)
{
key=KEY_Scan(0);
if(key==KEY0_PRES)
{
report=!
report;
if(report)
{
LCD_ShowString(30,170,200,16,16,"UPLOADON");
LED1=0;
}
else
{
LCD_ShowString(30,170,200,16,16,"UPLOADOFF");
LED1=1;
}
}
OSTimeDlyHMSM(0,0,0,100,OS_OPT_TIME_HMSM_STRICT,&err);//延时100ms
}
}
对于在LCD上姿态角的显示,结果只精确到小数点后的一位。
可以先定义一个短整型的temp,将要显示的姿态角负值给,它然后将其扩大10倍,分为整数部分和小数部分分别显示。
任务二的服务函数如下。
voidtask2_task(void*p_arg)
{
OS_ERRerr;
floatpitch,roll,yaw;//欧拉角
shortaacx,aacy,aacz;//加速度传感器原始数据
shortgyrox,gyroy,gyroz;//陀螺仪原始数据
shorttemp;//温度
u8t=0;
while
(1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
temp=MPU_Get_Temperature();//得到温度值
MPU_Get_Accelerometer(&aacx,&aacy,&aacz);//得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz);//得到陀螺仪数据
if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定义帧发送加速度和陀螺仪原始数据
if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
if((t%10)==0)
{
if(temp<0)
{
LCD_ShowChar(30+48,200,'-',16,0);//显示负号
temp=-temp;//转为正数
}elseLCD_ShowChar(30+48,200,'',16,0);//去掉负号
LCD_ShowNum(30+48+8,200,temp/100,3,16);//显示整数部分
LCD_ShowNum(30+48+40,200,temp%10,1,16);//显示小数部分
temp=pitch*10;
if(temp<0)
{
LCD_ShowChar(30+48,220,'-',16,0);//显示负号
temp=-temp;//转为正数
}elseLCD_ShowChar(30+48,220,'',16,0);//去掉负号
LCD_ShowNum(30+48+8,220,temp/10,3,16);//显示整数部分
LCD_ShowNum(30+48+40,220,temp%10,1,16);//显示小数部分
temp=roll*10;
if(temp<0)
{
LCD_ShowChar(30+48,240,'-',16,0);//显示负号
temp=-temp;//转为正数
}elseLCD_ShowChar(30+48,240,'',16,0);//去掉负号
LCD_ShowNum(30+48+8,240,temp/10,3,16);//显示整数部分
LCD_ShowNum(30+48+40,240,temp%10,1,16);//显示小数部分
temp=yaw*10;
if(temp<0)
{
LCD_ShowChar(30+48,260,'-',16,0);//显示负号
temp=-temp;//转为正数
}elseLCD_ShowChar(30+48,260,'',16,0);//去掉负号
LCD_ShowNum(30+48+8,260,temp/10,3,16);//显示整数部分
LCD_ShowNum(30+48+40,260,temp%10,1,16);//显示小数部分
t=0;
LED0=!
LED0;//LED闪烁
}
}
t++;
OSTimeDlyHMSM(0,0,0,10,OS_OPT_TIME_HMSM_STRICT,&err);//延时10ms
}
}
由于四元素的四个数都是大于0小于1,所以借鉴前面的经验,只需要显示小数部分。
将q扩大100000000倍后变成整数显示在LCD上。
任务3的函数如下:
voidtask3_task(void*p_arg)
{
floatquat[4]={0,0,0,0};
OS_ERRerr;
CPU_SR_ALLOC();
OS_CRITICAL_ENTER();
LCD_ShowString(30,300,200,16,16,"OrinalQuaternion:
");
POINT_COLOR=BLACK;//设置字体为黑色
//POINT_COLOR=BLUE;//设置字体为蓝色
LCD_ShowString(30,320,200,16,16,"q0=0.");
LCD_ShowString(30+100,320,200,16,16,"q1=0.");
LCD_ShowString(30+100*2,320,200,16,16,"q2=0.");
LCD_ShowString(30+100*3,320,200,16,16,"q3=0.");
OS_CRITICAL_EXIT();
while
(1)
{
if(MPU_Get_Quaternion(quat)==0);//读取MPU6050DMP处理后的数据
{
printf("四元素为q0=%fq1=%fq2=%fq3=%f\r\n",*quat,*(quat+1),*(quat+2),*(quat+3));
LCD_ShowxNum(70,320,quat[0]*10000000,7,16,0x80);//显示小数部分
LCD_ShowxNum(70+100,320,quat[1]*10000000,7,16,0x80);//显示小数部分
LCD_ShowxNum(70+100*2,320,quat[2]*10000000,7,16,0x80);//显示小数部分
LCD_ShowxNum(70+100*3,320,quat[3]*10000000,7,16,0x80);//显示小数部分
OSTimeDlyHMSM(0,0,0,10,OS_OPT_TIME_HMSM_STRICT,&err);//延时10ms
}
}
}
任务四负责LCD上显示一些字符,只执行一次。
任务四的服务函数如下:
voidtask4_task(void*p_arg)
{
POINT_COLOR=RED;//设置字体为红色
LCD_ShowString(30,340,200,16,16,"Clculate
 升级会员
升级会员 