第七章 刚体的平面运动.docx
《第七章 刚体的平面运动.docx》由会员分享,可在线阅读,更多相关《第七章 刚体的平面运动.docx(10页珍藏版)》请在冰豆网上搜索。
第七章刚体的平面运动
第七章刚体的平面运动
第1节刚体平面运动的基本概念
一、刚体平面运动
刚体运动时,若其上任一点至某个固定平面的距离保持不变,则称该刚体作平面运动。
二、刚体平面运动的简化
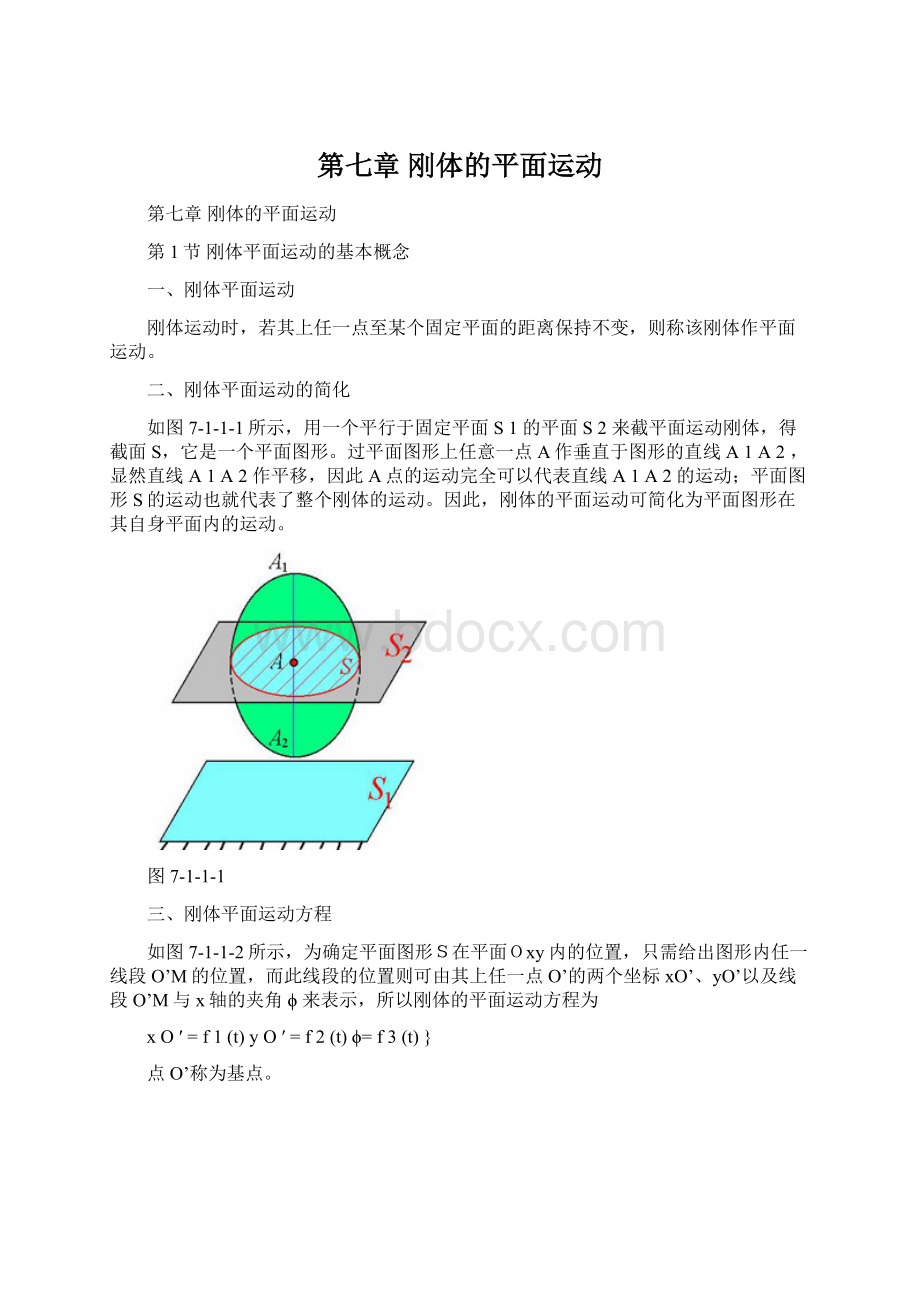
如图7-1-1-1所示,用一个平行于固定平面S1的平面S2来截平面运动刚体,得截面S,它是一个平面图形。
过平面图形上任意一点A作垂直于图形的直线A1A2,显然直线A1A2作平移,因此A点的运动完全可以代表直线A1A2的运动;平面图形S的运动也就代表了整个刚体的运动。
因此,刚体的平面运动可简化为平面图形在其自身平面内的运动。
图7-1-1-1
三、刚体平面运动方程
如图7-1-1-2所示,为确定平面图形S在平面Oxy内的位置,只需给出图形内任一线段O’M的位置,而此线段的位置则可由其上任一点O’的两个坐标xO’、yO’以及线段O’M与x轴的夹角ϕ来表示,所以刚体的平面运动方程为
xO′=f1(t)yO′=f2(t)ϕ=f3(t)}
点O’称为基点。
图7-1-1-2
四、刚体平面运动的分解
引入以基点为原点的平动坐标系后,利用上一章点的合成运动的理论知识,平面图形的运动可以分解为随着这平动坐标系的平动(牵连运动)和绕这平动坐标系原点的转动(相对运动)。
其中,平动部分的速度和加速度与基点的选择有关,而转动部分的角速度和角加速度则与基点的选择无关,称为刚体作平面运动的角速度和角加速度。
第2节平面图形内各点速度的求解
一、基点法
如图7-2-1-1所示,可以证明平面图形上任一点B的速度等于基点A的速度与B点随图形绕基点A转动的速度的矢量和,即
vB=vA+vBA
图7-2-1-1
其中vBA=|AB|ω,方向垂直于AB,并与平面图形的角速度ω的转向一致。
一般选取平面图形上速度已知或较容易求出的点作为基点。
二、速度投影法
将基点法得到的速度定理投影到AB方向,可得平面图形上任意两点的速度在这两点连线上的投影相等,这就是速度投影定理,即
(vA)AB=(vB)AB
此定理对于任何形式的刚体运动都成立,该定理也反映了刚体不变形的特点。
根据速度投影定理求速度的方法称为速度投影法。
三、速度瞬心法
1.速度瞬心
只要平面图形的角速度不为零,则此瞬时图形必定存在唯一的速度为零的点,称为平面图形的瞬时速度中心(简称速度瞬心)。
如果取速度瞬心C为基点,则平面图形上任一点M的速度等于该点绕速度瞬心C的转动速度,即
vM=|MC|⋅ω
其方向垂直于CM,并与图形的转动方向一致。
可见,只要知道某瞬时速度瞬心的位置和图形的角速度ω,就可以求出该瞬时图形上各点的速度,如图7-2-1-2所示,平面图形内各点的速度分布就像绕速度瞬心作定轴转动时的情形一样,其大小与各点到速度瞬心的距离成正比,这就是速度瞬心法。
图7-2-1-2
2.确定速度瞬心的方法
在几种不同情况下,速度瞬心C的位置可如下确定:
(1)如果已知图形上一点的速度vA和图形角速度w可以确定速度瞬心的位置C,如图7-2-1-3所示,C在vA绕A点顺w转向转90∘的方向一侧,C到A的距离为
AC=vAω,AC⊥vA
图7-2-1-3
(2)如果已知某瞬间平面图形上A、B两点速度vA和vB的方向,则过A、B两点分别作速度vA和vB的垂线,交点C即为该瞬间的速度瞬心,如图7-2-1-4所示。
图7-2-1-4
(3)如果已知某瞬间平面图形上A、B两点速度vA和vB的方向及大小,且vA⊥AB,vB⊥AB则速度瞬心所在位置如图7-2-1-5和7-2-1-6所示。
图7-2-1-5
图7-2-1-6
(4)如果已知某瞬间平面图形上A、B两点速度vA和vB平行且相等,则速度瞬心在无穷远点,此时的平面运动称为瞬时平动,如图7-2-1-7所示,该瞬时图形上各点的速度均相同,但加速度不相同。
图7-2-1-7
(5)如果平面图形在固定面上作无滑动的滚动,则图形与固定面的接触点C即为速度瞬心。
以上求平面图形上点的速度的三种方法,基点法是基本方法,不仅能求解平面图形上各点的速度,而且还能求出图形的角速度。
速度投影法和瞬心法是由基点法推导出来的,利用速度投影法时不能求出图形的角速度;速度瞬心法既能求解平面图形上各点的速度,也能求出图形的角速度,但须先正确确定速度瞬心的位置。
有些复杂机构,可将三种方法配合使用。
例1
如图7-2-1-8所示机构,已知:
曲柄连杆机构OA=AB=l,曲柄OA以匀角速度ω转动。
求:
当φ=45∘时,滑块B的速度及AB杆的角速度。
图7-2-1-8
解:
法一:
基点法
机构中,OA作定轴转动,AB作平面运动,滑块B作平动。
以为研究对象,取为基点,各速度满足速度合成定理
vB=vA+vBA
根据速度关系可画出B点的速度图如图7-2-1-9所示,其中vA=lω方向垂直于OA,vB沿水平方向,vBA垂直于AB。
于是根据几何关系得到
vB=vAcosϕ=2lωvBA=vAtanϕ=lωωAB=vBABA=ω
图7-2-1-9
ωAB转向为顺时针方向。
法二:
速度投影法
由图7-2-1-9根据速度投影定理有
(VA)AB=(VB)ABVA=VBcos450
于是可得vB=2lω。
但应用该法得不到AB的角速度。
法三:
速度瞬心法
根据A、B两点速度vA和vB的方向可找到AB的速度瞬心为P,如图7-2-1-10所示,于是有
ωAB=vAPA=lωl=ω,vB=PB⋅ωAB=2lω
转向为顺时针方向。
图7-2-10
讨论:
当杆OA转到φ=90∘时,滑块B的速度及AB杆的角速度为何?
AB做什么运动?
第3节平面图形内各点加速度的求解
加速度的分析主要用基点法,加速度图如图7-3-1-1所示,即平面图形上任一点B的加速度等于基点A的加速度与B点随图形绕基点A转动的切向加速度和法向加速度的矢量和,即
图7-3-1-1
aB=aA+aBAτ+aBAn
其中aBAτ=|AB|⋅α方向垂直于AB,并与ω的转向一致,aBAn=|AB|⋅ω2方向由点B指向基点A。
一般选平面图形上加速度已知或容易求出的点作为基点。
因为在一般情况下,将由基点法给出的加速度合成公式向AB连线上投影时,aBAτ的投影固然为零,但aBAn的投影却不为零,所以B、A两点的加速度aB和aA在其两点连线BA上的投影不相等,故不存在像速度投影定理那样简单且具一般意义的加速度投影定理。
只在平面图形的角速度ω=0在其两点连线BA上的投影不相等,故不存在像速度投影定理那样简单且具一般意义的加速度投影定理。
只在平面图形的角速度ω=0的瞬时,才有任意两点的加速度在其连线上的投影彼此相等这种瞬时存在的特殊情况,故一般而言,求平面图形上点的加速度没有投影法。
另外,与速度瞬心的概念类似,平面图形在每一瞬时,一般也在平面图形内存在一加速度等于零的点,称为平面图形的加速度瞬心。
一般情况下,速度瞬心与加速度瞬心不在同一点,而且确定加速度瞬心常很麻烦,故求平面图形上点的加速度时,一般不用加速度瞬心法。
例1
曲柄滑块机构如图所示,曲柄OA长R,连杆AB长l。
设曲柄以匀角速度ω沿逆钟向绕定轴O转动。
试求当曲柄转角为φ时滑块B的加速度和连杆AB的角加速度。
图7-3-1-2
解:
先求连杆AB的角速度。
因为A点速度vA已知,故选A为基点。
应用速度合成定理,B点的速度可表示为
vB=vA+vBA
其中vA的大小vA=Rω。
由速度合成矢量图7-3-1-3及7-3-1-4,根据几何关系可得
vAsin(π2−ψ)=vBAsin(π2−ϕ)=vBsin(ψ+ϕ)
图7-3-1-3
图7-3-1-4
其中sinψ=Rlsinϕ,所以有
vBA=cosϕcosψRω
于是可求得连杆AB的角速度
ωAB=vBAl=Rlω⋅cosϕcosψ
转向为顺时针转向。
下面求滑块B的加速度。
选点A为基点,则滑块B的加速度为
aB=aA+aBAτ+aBAn
其中基点A加速度的大小为aA=aAn=Rω2,方向沿AO,动点B绕基点A相对转动的法向加速度的大小为aBAn=AB⋅ωAB2,方向沿BA。
而B绕基点A相对转动的切向加速度aBAτ和B点的加速度aB的方向都是假设的,大小待求。
加速度图如图7-3-1-4所示。
图7-3-1-5
求aB时,为了使aBAτ在方程中不出现,将加速矢量式投影到BA方向,可得投影式为
aBcosψ=aAcos(ϕ+ψ)+aBAn
从而求得滑块B的加速度
aB=1cosψ[aAcos(ϕ+ψ)+aBAn]
同理在求aBAτ时,为了使aB在方程中不出现,可将加速矢量式投影到铅垂方向上,有
0=−aAsinϕ+aBAτcosψ+aBAnsinψ
从而求得
aBAτ=1cosψ(aAsinϕ−aBAnsinψ)
连杆AB的角加速度
αAB=aABτAB=1l⋅cosψ(aAsinϕ−aBAnsinψ)
转向为逆时针转向。
第4节运动学综合应用
在工程实际中,需要综合应用平面运动机构,其运动形式一般都很复杂,因此对其进行运动分析,必须运用运动学理论。
而其难点一般出现在点的合成运动理论与刚体平面运动理论的综合应用中。
在求解此类问题时,要注意两点。
首先要依据各刚体的运动特征,分辨它们各自做什么运动,是平动、定轴转动还是平面运动;其次,刚体之间是靠约束来传递运动,这就需要建立连接点的运动学条件。
特别是两刚体间的连接点有相对运动的情形。
例如,用滑块和滑槽连接两刚体时,连接点的速度和加速度是不相同的,需要应用点的合成运动去建立连接点的运动学条件。
如果被连接的刚体中有作平面运动的,则需要综合应用点的合成运动和刚体的平面运动的理论去求解。
求解时应从已知运动条件得刚体开始,然后通过已建立的运动学条件过渡到相邻的刚体,直到最后将解全部求得。
 升级会员
升级会员 