机械的振动实验指导新.docx
《机械的振动实验指导新.docx》由会员分享,可在线阅读,更多相关《机械的振动实验指导新.docx(9页珍藏版)》请在冰豆网上搜索。
机械的振动实验指导新
实验一建筑结构振动实验
一、实验目的
1、通过测试结构在不同频率激励下振动的过程,掌握激振与响应的基本知识。
2、了解和掌握振动测量仪器的标定和使用。
3、掌握结构共振的概念,以及结构固有频率和阻尼的测试方法。
二、实验装置
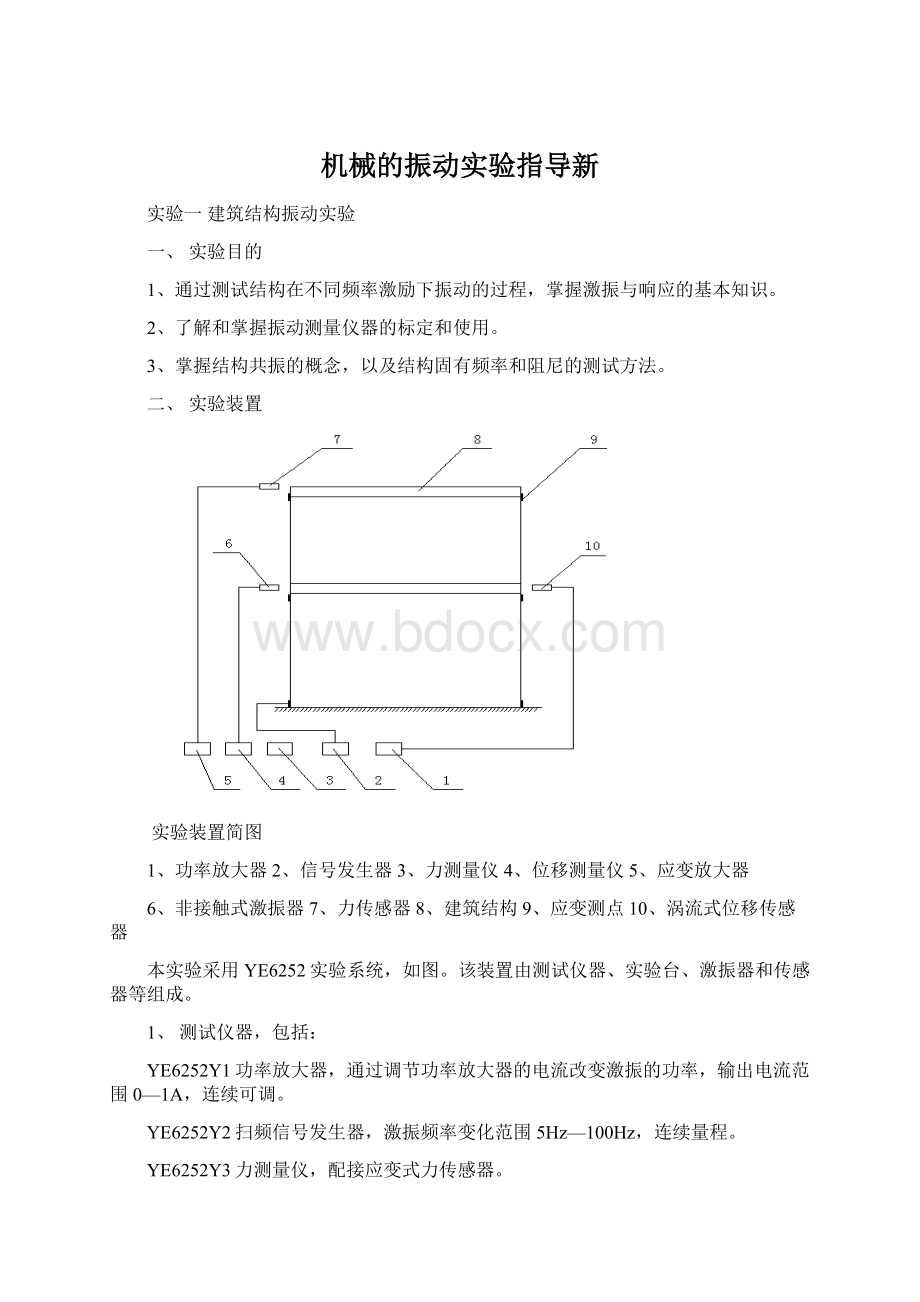
实验装置简图
1、功率放大器2、信号发生器3、力测量仪4、位移测量仪5、应变放大器
6、非接触式激振器7、力传感器8、建筑结构9、应变测点10、涡流式位移传感器
本实验采用YE6252实验系统,如图。
该装置由测试仪器、实验台、激振器和传感器等组成。
1、测试仪器,包括:
YE6252Y1功率放大器,通过调节功率放大器的电流改变激振的功率,输出电流范围0—1A,连续可调。
YE6252Y2扫频信号发生器,激振频率变化范围5Hz—100Hz,连续量程。
YE6252Y3力测量仪,配接应变式力传感器。
YE6252Y4位移测量仪,配接涡流式位移传感器。
YE6252Y5应变测量仪,配接应变式传感器。
2、实验台包括建筑(楼房)模型,激励及测量装置。
3、激振器和传感器包括
YE1501非接触式激振器
CWY-DO-504电涡流式位移传感器
CL-YB-3/100K力传感器
六个可自由组桥的应变测点。
三、实验原理
系统在外力的激励下产生受迫振动,受迫振动的振幅取决于系统本身的物理性质和激振力的幅值与频率。
若激振力的幅值一定,则受迫振幅的大小与激振力的频率有关,当激振力的频率
与系统的结构固有频率
相同时,结构的振幅将达到极大值,这就是结构共振。
通过改变激振器的力值(由变化功率放大器电流实现)和频率(由变化扫频信号发生器频率实现),对建筑结构模型产生不同频率和力值的激励,结构则产生不同振幅的振动,通过测试结构在不同频率下的响应,绘出结构的受迫振动幅频曲线图。
由于阻尼的存在,共振时系统的振幅有一定的限度。
系统的阻尼大,则共振时的振幅小;系统的阻尼小,则共振时的振幅大。
阻尼比
可用系统受迫振动幅频曲线来确定。
即按下式计算(这种测定阻尼比的方法称为半功率法):
式中,
—结构的固有频率
—固有频率后振幅为最大振幅
倍点处的频率。
—固有频率前振幅为最大振幅
倍点处的频率。
因此,根据结构的受迫振动幅频曲线图,可得到结构的固有频率和阻尼等重要动态参数。
四、实验步骤
1、熟悉实验用设备和仪器。
2、传感器的标定
确定激振力、振动位移和结构应变之间的对应关系
整理出激振力、振动位移和应变的标定数据表。
3、激振实验,绘出结构的受迫振动幅频曲线图。
确定结构的固有频率
和阻尼
。
在一定的力值下,由5Hz开始,逐渐变化扫频信号发生器的频率,记录不同频率下结构的振幅,观察分析结构振幅随激振频率变化的情况。
可观察到,随着激振频率的升高,结构的振幅也越来越高,当激振频率达到结构固有频率时,振幅出现一个峰值。
当激振频率超过结构固有频率后继续升高激振频率,振幅又逐渐降低。
改变功率放大器的电流,在新的力值下,重复过程
,并记录结构在不同激振频率下的振幅。
整理结构在不同频率下的振幅,根据数据画出结构的幅频曲线图。
并确定该建筑结构的固有频率(既最大振幅所对应的频率)。
用半功率法估算出该结构的阻尼
。
五、实验报告
实验报告包括以下内容:
1、实验目的
2、实验装置,画出实验装置示意简图
3、简述实验过程
4、标定数据表
5、幅频曲线图
6、结论,结构的固有频率和阻尼。
实验二转子不平衡振动分析实验
一、实验目的
1、观察转子的不平衡振动现象,了解和掌握转子不平衡引起激励以及转子系统振动响应的概念,以及转子不平衡故障的频谱特性。
2、了解和掌握转子振动测量分析仪器的使用,掌握转子振动振幅和相位的测试方法。
二、实验装置
1、转子振动模拟试验台。
4.光电传感器头5.传感器6.转轴
7.传感器支座8.联轴节9.电机
10.调压器11.前置放大器12.振动测试分析仪
图1所示为转子实验装置,它包括转子故障模拟实验平台和测试分析仪器两部分,故障模拟实验平台型号为QPZ-II,它包括电机、支撑和转子;转子由轴和两个转盘组成,转盘尺寸为
200
10。
转子的转速可调,转速变化是通过串激电机改变电压实现的。
测试仪器为两个测振传感器(速度传感器)及其前置放大器,测试转速的激光转速传感器,以及计算机化振动分析仪器等。
2、振动测试及分析仪器
本实验的振动测试及动平衡分析采用CRAS动平衡分析系统。
该仪器可进行转子振动的振幅与相位测试和频谱分析。
三、转子的不平衡振动原理
不平衡是转子最常见的故障。
造成转子质量不平衡的原因大致有:
⑴设计制造方面的原因如旋转体几何形状不对称,材料缺陷、焊接或浇铸上的缺陷、装配误差、转子动平衡方法不当等引起的质量不对称,使转子重心不在旋转轴线上。
图2典型的不平衡频谱
⑵工艺过程的原因如转子初始弯曲、转子受热不均匀、转子部件结垢、转子部件脱落、分离机械转鼓内物料分布不均匀等,引起转子质量偏心。
转子质量不平衡所产生的离心力始终作用在转子上,转子每旋转一周,就在转子或轴承处产生一次激振。
因此它的振动频率就是转子的转速频率,即
或
转速频率也称为工频,即工作频率,如图6-5中ω0。
这种频率成分很容易在频谱图上观察到。
转子不平衡故障的特征是:
⑴在转子径向方向的频谱图上,转速频率成分具有突出的峰值;
⑵转速频率成的高次谐波幅值很低,因此反映在时域上的波形很接近于一个正弦波;
⑶对于普通两端支承的转子,轴向测点上的振值一般并不明显。
监测值类型:
pp(双峰值)。
工程单位:
μm。
电压范围:
±5000Mv。
通道标记:
确认各通道(传感器)的振动方向,X或Y。
所有参数确定后,点击“确认”。
5、在每个轴承座锣钉孔滴入所需润滑油;然后打开试验台调速器电源。
微小转动调压器旋钮,转子即会转动。
缓慢地转动调压器,逐步升速;升速时必须注意防止瞬时电流过大。
升速记录时不得降速(即反向转动调压器)。
振动记录结束后,反向转动调压器平稳降速。
直至电压为零,再切断电源。
6、在转子启动的同时,点击“在线监测”,即可观察到由两个传感器(一个水平放置、一个垂直放置)分别采集的转子两个方向的振动波形,随着转速的升高,振幅也越来越高,当转速接近临界转速时,振幅出现一个高峰。
当转速超过临界转速后继续升速,振幅降低,逐渐达到一稳定值。
7、振动记录结束后,通过显示器观察转子的动态特性,有两种方式:
伯德图依次点击“瞬态分析”,“伯德图”,即看到两通道的转子振动幅频特性和相频特性曲线。
点击通道1或通道2,观察并记录单个通道的从振幅和相位两个方面反映的转子振动情况。
一般振幅极大值所对应的转速就是临界转速,临界转速附近的高振幅区为共振区。
当转速经过共振区时,相位发生突变(约180°的相位变化)。
轴心轨迹图依次点击“图形显示”,“轨迹图”,即看到某一转速下的轴心轨迹图,看到转速频率的轴心轨迹圆,通过点击改变转速(时间),观察不同转速下的轴心轨迹圆形状。
转速由低速逐渐升高时,轨迹圆越来越大,再通过临界转速时,图形迅速增大,图形的方向突然改变。
通过临界转速后,图形逐渐缩小。
8、根据观察分析结果,确定转子的临界转速。
9、改变转子位置;重复步骤5-8。
10、实验结束后,先切断稳压电源,接口箱的电源,再切断计算机的电源。
实验数据记录
第1次(a=b=)
第2次(a=b=)
转速(rpm)
幅值(μm)
相位(度)
转速(rpm)
幅值(μm)
相位(度)
四、数据整理
1、画出实验台转子结构示意图
2、手工画出波德图,(振幅-转速图和相位-转速图)列出最大振动位移量和临界转速值
3、按理论公式计算该转子的临界转速(转轴的直径为
9.5mm,转盘分为两种规格。
76J较厚的转盘质量为800g;较薄的转盘质量为600g。
)
转子临界转速简易计算公式(邓柯来公式):
式中:
的尺寸见图4,由现场测量
——以“弧度/秒”单位表示的转子临界转速,
——转速转/分
材料弹性膜量,
;
——两转盘的质量,
轴的截面惯性距,
,
转轴直径,(较厚的转盘质量为800g;较薄的转盘质量为600g。
)
4、
图4转子示意图
对结果进行分析比较。
五、实验报告:
实验报告内容
1、实验目的
2、实验装置(画出实验台转子结构示意图)
3、实验过程
5、实验记录表
6、手工画振幅-转速图和相位-转速图
7、采用邓柯来公式分别计算出转子的临界转速,与实验值比较,并分析原因。
六、注意事项:
1、启动转子前先检查所有螺钉是否拧紧。
2、变速时要缓慢,开始时不要一下将转速升得很高。
3、在临界转速附近要避免停留时间过长。
4、传感器头与轴的距离要有1mm以上。
 升级会员
升级会员 