北京交通大学 电气工程学院 计算机仿真 大作业.docx
《北京交通大学 电气工程学院 计算机仿真 大作业.docx》由会员分享,可在线阅读,更多相关《北京交通大学 电气工程学院 计算机仿真 大作业.docx(18页珍藏版)》请在冰豆网上搜索。
北京交通大学电气工程学院计算机仿真大作业
学院电气工程学院班级电气班学号姓名
------------------------------------装-------------------------------------------------------------------订--------------------------------------线-----------------
北京交通大学2012-2013学年第二学期考试试题
课程名称:
计算机仿真技术
北京交通大学
电气班
姓名:
学号:
题目:
12脉波整流电路仿真
三相桥式全控整流电路是应用广泛的整流电路,完整的三相桥式全控整流电路由整流变压器、晶闸管整流桥、负载、脉冲触发器和同步环节等组成。
传统的6脉波全控整流电路交流侧存在较大的谐波电流。
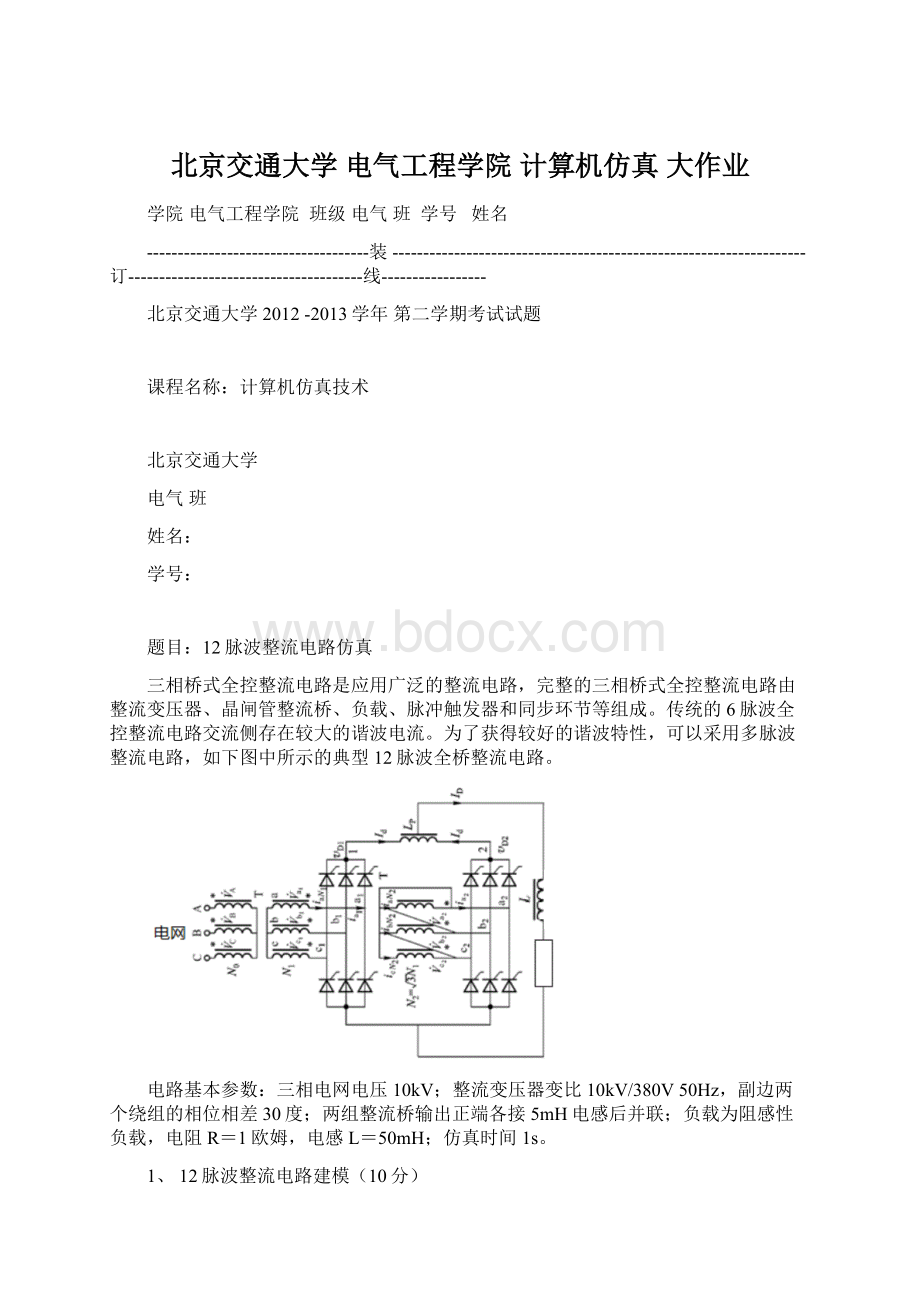
为了获得较好的谐波特性,可以采用多脉波整流电路,如下图中所示的典型12脉波全桥整流电路。
电路基本参数:
三相电网电压10kV;整流变压器变比10kV/380V50Hz,副边两个绕组的相位相差30度;两组整流桥输出正端各接5mH电感后并联;负载为阻感性负载,电阻R=1欧姆,电感L=50mH;仿真时间1s。
1、12脉波整流电路建模(10分)
根据题目给出的主电路和基本参数,建立完整的12脉波整流电路的模型,即包括主电路、同步电路、触发脉冲电路、仿真结果测量及显示电路等,给出建模思路说明和主要元器件参数设置说明。
解:
在1000KW以上的大功率系统中,常采用双十三桥构成的十二相整流电路。
对于晶闸管-直流电动机系统,为了克服电压或电流脉动对生产机械造成的损害,也常常采取增加整流电路的相数,而采用十二相整流电路。
仿真电路图如下所示。
电源选择线电压10kV,频率50Hz。
三相变压器2绕组选择Y接,3绕组选择D1接。
在这里要注意,要和触发器的D1选择相同,不然会出现触发错误的现象。
变压器的变比为10kV/380V/380V,为了忽略电感带来的换向重叠,使直流电压下降,所以将绕组的电感设为0。
2、12脉波整流电路开环仿真(15分)
(1)要求输出的负载平均电压为300V,根据直流电压平均值与触发角的关系,估算触发角,给出估算依据和说明。
(2)设置整流桥的触发角,进行仿真。
给出两组整流桥A相下桥臂晶闸管触发脉冲、A相同步电压信号的波形,要求在同一示波器下显示。
(3)采用POWERGUI模块(或其他模块)对三相电网中的电流、一个整流桥的三相电流进行分析,分别记录从0.5s开始的一个基波周期的电流波形及FFT分析图,分析比较12脉波整流电路与6脉波整流电路的谐波电流及THD特性。
解:
(1)由于电源并联输出电压不变,所以输入电压与输出电压的关系可以用三相全控整流桥公式得出,即
,所以
,实际仿真中测试的角度为
,当角度为
时,输出电压平均值为300V,以下的仿真均是在角度为
时的运行的。
负载R上的电压波形如图所示。
可以看出,负载R上的电压平直,为300V,并且基本无波动,说明副边的电流也基本为恒定,等效为直流源。
12脉波整流电路的直流侧输出电压Ud(R+L的电压)如下图所示。
输出电压波动范围为200V—400V,约有200V的电压波动。
直流侧输出电压的细节如下所示。
输出电压平均值为300V。
对比三相全控整流桥,三相全控整流桥的直流侧输出波形如下所示。
输出电压波动范围为50V—490V,约有440V的电压波动。
下图为三相全控整流电路输出电压的细节图。
由图可以看出,带平衡电抗器的12脉相控整流电路的电压脉动明显小于三相全控整流电路,电压的谐波分量明显减小,适合带对电压质量要求高的负载。
不接平衡电抗器时L时,同双反星形电路一样,两组桥不能同时向负载供电,而只能交替地向负载供电,不过交替的间隔是π/6。
接入平衡电抗器L后,当1组桥的瞬时电压高于2组桥的瞬时电压,并同时伴有整流电流输出时,会在平衡电抗器的两端产生感应电动势,其一半减小1组桥的电动势,另一半则增加2组桥的电动势,通过电抗器的平衡作用,同时维持两组桥都工作在三相全控桥相控整流状态。
当1组桥的瞬时线电压等于2组桥的瞬时线电压时,两组桥并联运行,此时在平衡电抗器上产生的感应电动势为零。
之后当2组桥的瞬时线电压大于1组桥的瞬时线电压时,则平衡电抗器上产生的感应电动势极性相反,继续维持两桥正常导通。
(2)从上到下依次为:
绕组2的A相电压,绕组2的AB线电压,绕组2对应整流桥的A相下管触发信号,绕组3的AB线电压,绕组3对应整流桥的A相下管的触发信号。
可以看出,D1接绕组比Y接绕组滞后了30度,同时对应的触发信号也比Y接的触发信号滞后了30度。
(3)使用powergui进行FFT分析图,设置为离散模式,取样时间为0.00005s。
下列仿真波形依次为:
1带平波电抗器的12脉波全控整流电路绕组2(副边Y接绕组)的a相电流
2三相全控相控整流电路的交流侧A相电流
3带平波电抗器的12脉波全控整流电路高压侧A相电流
①下图为绕组2的A相的电流波形。
与三相全控的一相电流波形相似,只是在最高点有波动。
傅立叶频谱分析如下。
最低次谐波为300Hz,是基波的6倍频。
THD=31.42%。
2三相全控相控整流电路的交流侧A相电流波形图如下所示。
为阶梯波,在最点无抖动。
傅立叶分析如下图所示。
最低次谐波为300Hz,是基波的6倍频。
THD=31.12%。
其频谱和带平波电抗器的12脉波全控整流电路绕组2(副边Y接绕组)的a相电流相似,高频谐波下降的速率较慢,所占成分比较多,对电路谐波干扰更大。
3带平波电抗器的12脉波全控整流电路高压侧A相电流波形图如下所示。
可以看出,A相电流波形已经和正弦波形基本类似,电流的纹波明显变小。
傅立叶分析图如下所示。
对A相电流进行分析:
假设直流侧为大电感负载,电流恒定,则
的傅立叶级数表达式为
绕组a、b的相电流
、
为
由于三项对称,
绕组c相电流
故
则
由于
若一次绕组
则一次测A相电流应为
由此可得
所以,带平衡电抗器的双三相桥式12脉波整流桥电路交流电源中只含有12K
1次谐波电流,最低次谐波电流为11次,而三相桥6脉波整流电路交流电源中含有6K
1次谐波电流,最低次谐波电流为5次。
从图中也可以明显看出,最低次谐波出现在550Hz,THD=6.54%明显变小,谐波的次数增大并且比重变小,变得更容易滤除,对设备的干扰更小。
所以12脉波整流电路可以明显改善电流波形,提高了电流的质量。
3、12脉波整流电路闭环仿真(10分)
采用电流闭环控制,使两组整流桥输出的电流都为100A。
说明相关参数,分别给出两组整流桥的电流输出波形、交流侧输入电流波形、10kV电网电流波形。
电流闭环控制框图如下图所示。
解:
闭环仿真电路图如下所示。
不加PI控制前,假设两路的输出电流为100A时,总输出电流为200A,输出电压为200V,通过计算得出,控制角度为67度。
则以67度为基准值进行仿真。
则设计思路为:
使指令电流信号为100A,与反馈叠加,通过PI控制器后,添加67度的偏移量(即两组电路的基准值。
如果不加基准值,运行仿真后,系统也可以自动找到平衡的触发角,也可以完成仿真波形,加入67度是初始给系统一个角度定位,使系统仿真速度更快,其余波形没有差别),完成控制环节。
两个PI控制器参数相同,设置如下:
Kp为0.7,Ki为10。
运行仿真,负载R上通过的电流如图所示。
可以看到电流在0.1s左右有超调尖峰,然后平滑下降,稳定在200A。
两路输出电流(L1、L2上流过的电流)如图所示。
电流在0.2s就达到稳定,在100A附近波动,波动范围是80A—120A。
下图为两路输出电流互补,叠加以后流过负载,可以看到,输出到负载上的电流维持在200A不变。
输出电流的平均值如下所示,两路电流的平均值均在100A左右,说明调节基本达到要求。
下图为没有经过PI调节的通过L1、L2的电流,可以看到,电流在3s时仍然不稳定,L1路仍然有下降的趋势,L2路有上升的趋势。
从两路的输出电流平均值可以看出,两路电流并不是100A和100A的关系,而是69.96A和130.4A的关系,两路所承担的电流值不想等,这会使绕组3上承担更多的电流负担,并且减少了绕组2利用率。
下面对比有PI和无PI控制时的三项绕组原边和两个副边的相电流。
下图为添加PI控制器的相电流波形。
从上到下的电流依次为原边A相电流IA,绕组2a相流过的电流Ian_w2,绕组3a端输出电流Ian_w3。
下图为三个相电流的细节图。
可以看出,绕组2a相流过的电流Ian_w2和绕组3a端输出电流Ian_w3的波形基本相同,幅值一致,两绕组承担的电流负担相同。
下图为没有添加PI控制器的相电流波形。
从上到下的电流依次为原边A相电流IA,绕组2a相流过的电流Ian_w2,绕组3a端输出电流Ian_w3。
可以看出,绕组2和绕组3的电流波形在3s还未稳定,绕组2相电流有减小趋势,绕组3电流有增大趋势。
从细节图可以看出绕组2和绕组3的相电流的幅值相差很多,峰值绕组2为90A,绕组3为140A。
通过相电流波形也可以看出,绕组2和绕组3的电流负担不同,一个承担了过多的负担,一个利用率不足。
对控制角度进行跟踪,可以看到触发角度,并不是稳定不动,而是不断在变化。
这说明角度随着输出的变化,也在调节中,才使得两路的输出电流各保持在100A。
可以看到,触发角也基本互补变化,变化角度在65度—95度。
角度的平均值都为79度左右。
不用PI控制直接将角度设为79度,直流侧L1、L2输出波形如下。
电流已经非常不平均。
L1支路(即绕组2电流)基本上承担了所有的电流量,L2支路基本没有电流流过。
由以上仿真结果可以看出,加入PI控制后,可以实现对触发角的动态控制,从而控制了直流侧两路电流的平均值,使电流更均匀,保证了两绕组的利用率。
4、总结与体会(5分)
总结仿真中遇到的问题,以及对本门课程的心得体会等。
答:
我认为计算机仿真是一门非常实用的课程,我们学习计算机仿真的同时,正好也同时在学习电力电力课程,最直接的收益就是,做完了计算机仿真,对电力电子技术的理解就加深了,理解起来也更加容易了。
计算机仿真最重要的事情,就是一定要亲自动手去做。
这些仿真模型的建立、参数的设定、波形的分析能力,都是需要亲自去搭建、去设置、去计算才能学会的,平时不努力,只靠拷贝别人的仿真结果,是不可能学会、学好学一门课程的,最重要的学不会这样一个实用的、对以后都有帮助的仿真技术。
仿真的过程中,总是遇到各种各样的问题。
就拿大作业来说,刚开始仿真显示的平均值总是不对,和理论计算的结果总是有很大差距,我抱着电力电子课本研究了一下午,也找不出来问题。
最后终于发现,是平均值的模块Inmean选择错误,应该选择Discrete离散模块。
使用离散模型后,结果就准确的显示了出来。
有时候遇到问题,而老师不在身边,我也会利用XX等工具,更加深入的了解simulink的一些仿真功能,完成所需的仿真。
最后感谢老师对我们耐心的指导,除了上课之外,在周三下午答疑时会耐心的在机房给我们解答问题,使我们可以快速准确的完成仿真。
我相信学习的这门技术,一定会陪伴我走很远,在我以后的学习工作中,一定会经常和它见面的。
这门课学的很开心,也很有意思。
再次谢谢老师的指导。
 升级会员
升级会员 