一级注册建筑师 结构 力学 自由度.docx
《一级注册建筑师 结构 力学 自由度.docx》由会员分享,可在线阅读,更多相关《一级注册建筑师 结构 力学 自由度.docx(15页珍藏版)》请在冰豆网上搜索。
一级注册建筑师结构力学自由度
2.1基本概念
教学要求
理解几何可变体系(常变体系和瞬变体系)与几何不变体系、瞬铰、自由度的概念。
2.1.1体系的分类
前提:
体系受到各种可能荷载作用,不考虑材料的应变。
(1)几何可变体系:
体系保证几何形状、位置不变
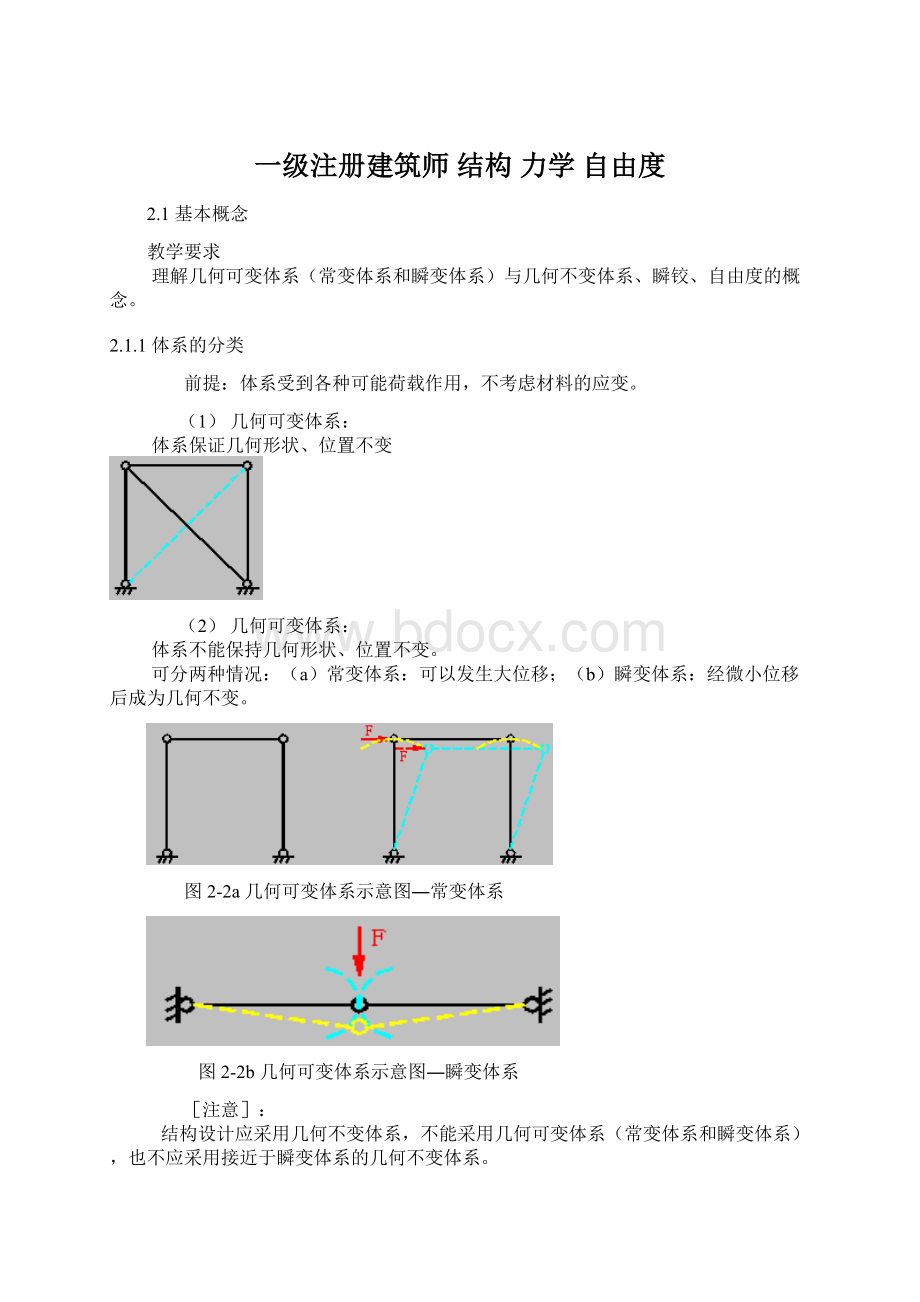
(2)几何可变体系:
体系不能保持几何形状、位置不变。
可分两种情况:
(a)常变体系:
可以发生大位移;(b)瞬变体系:
经微小位移后成为几何不变。
图2-2a几何可变体系示意图―常变体系
图2-2b几何可变体系示意图―瞬变体系
[注意]:
结构设计应采用几何不变体系,不能采用几何可变体系(常变体系和瞬变体系),也不应采用接近于瞬变体系的几何不变体系。
2.1.2运动自由度
体系运动时,可以独立变化的几何参数的数目,也就是确定该体系位置时所需的独立参数数目。
[注释]平面运动的特点:
水平移动,竖向移动,转动
1动点=2自由度1刚片=3自由度
图2-3a1动点 图2-3b1刚片
2.1.3约束
(1)概念:
限制体系的运动减少体系自由度的装置
支杆(约束) 铰(约束) 固定端(约束)
铰(内部) 固定端(内部)
(2)种类:
多余约束和必要约束
多余约束:
不能减少体系自由度的约束。
必要约束(必要约束):
能减少体系自由度的约束。
图2-5a必要约束 图2-5b多余约束
[注释]图2-5b中:
杆(刚片)1~3中有一个是多余约束。
[注意]:
多余约束与非多余约束是相对的,多余约束一般不是唯一指定的。
2.1.4铰
实铰:
两链杆直接相交的铰;
瞬铰或虚铰:
两链杆延长线相交的铰;[特例]:
两链杆平行,相交点在无穷远。
图2-6a实铰图 2-6b虚铰(延长线交于一点及交点在无穷远)
[注意]:
关于无穷远点和无穷远线的四点结论:
(在几何构造分析中必须注意)
(1)每个方向有一个∞点(即该方向各平行线的交点);
(2)不同方向上有不同的∞点;
(3)各∞点都在同一直线上,此直线称为∞线;
(4)各有限远点都不在∞线上。
2.2平面几何不变体系的组成规律
教学要求
熟练掌握几何不变体系的三条基本组成规律。
2.2.1一个点与一个刚片的联结方式——二元体法则
一个刚片与一个点用两根链杆相连,且三个铰不在一直线上,则所组成几何不变体系,并且没有多余约束。
说明:
以下把研究的对象简称“对象”,对象之间的联系简称“联系”。
图2-7a几何不变无多余约束 图2-7b瞬变
分析:
图2-7a:
对象:
刚片
(1)与点A;联系:
链杆1和2;且A、B、C不共线。
特例:
三个铰共线,则是瞬变体系。
图2-7b:
对象:
刚片
(1)与点A;联系:
链杆1和2;但A、B、C不共线。
例:
图2-8
分析:
图2-8
图a:
刚片
(1)与点A;联系:
链杆1和2;且A、B、C不共线。
――组成大刚片1
图b:
大刚片1与点B; 联系:
链杆3和4;且A、C、D不共线。
――组成大刚片2
其他同理,见图2-8的图形描述。
[引伸]
二元体:
单铰相连且不在同一直线上的两根链杆。
如图2-8a中的1、2杆;3、4杆;5、6杆;7、8杆;9、10杆;11、12杆;。
二元体的性质:
在一个体系上增加或减少1个二元体,不影响原体系的几何组成。
图2-8中,图a)、b)、c)、d)、e)、f)的几何组成是相同的,从图a)~图f)为增加二元体;从图f)~图a)为减少二元体。
2.2.2两个刚片之间的联结方式——两刚片法则
(1)两个刚片用一个铰和一根链杆相连结,且三个铰不在一直线上,则所组成几何不变体系,并且没有多余约束。
图2-9几何不变无多余约束
分析:
图2-9
对象:
刚片
(1)与
(2);联系:
链杆1和铰A;且A、B、C不共线。
特例:
三个铰共线,为瞬变体系。
图2-10瞬变体系
分析:
图2-10
对象:
刚片
(1)与大地;联系:
链杆1和铰A;且不共线――组成大刚片
(2)。
对象:
大刚片
(2)与刚片(3);联系:
链杆2和铰B;但共线。
(2)两刚片三链杆
对象:
刚片
(1)与
(2);联系:
链杆1、2和3。
(a)三链杆不共点,且不平行,几何不变体系(图2-11a)。
图2-11
特例:
三链杆平行等长:
常变体系(图2-11b);三链杆平行不等长:
瞬变体系(图2-11c);
(b)三链杆共点:
常变体系(图2-12a);
图2-12
特例:
延长线交于一点:
瞬变体系(图2-12b);
2.2.3三个刚片之间的联结方式——三刚片法则
三刚片用不共线的三铰两两相连组成体系几何不变且无多余约束。
图2-13几何不变无多余约束
分析:
图2-13a和b
对象:
刚片
(1)、
(2)与(3);
联系:
刚片
(1)和
(2)铰A;刚片
(1)和(3)铰B;刚片
(2)和(3)铰C;且三铰不共线。
分析:
图2-13c
对象:
刚片
(1)、
(2)与(3);
联系:
刚片
(1)和
(2)铰A(虚铰,杆1、2延长线的交点);刚片
(1)和(3)铰B;刚片
(2)和(3)铰C;且三铰不共线。
分析:
图2-13d
对象:
刚片
(1)、
(2)与(3);
联系:
刚片
(1)和
(2)铰A(虚铰,杆5、6延长线的交点);刚片
(1)和(3)铰B(虚铰,杆1、2延长线的交点);刚片
(2)和(3)铰C(虚铰,杆3、4延长线的交点);且三铰不共线。
特例:
若三铰共线,则为瞬变体系
图2-14瞬变体系
对象:
刚片
(1)、
(2)与(3);
联系:
刚片
(1)和
(2)铰A;刚片
(1)和(3)铰B;刚片
(2)和(3)铰C;但三铰共线。
[注意]1.三铰为两两相交的铰;2.所有规则可以统一为三角形法则:
由三个链杆组成的三角形为几何不变体系且无多余约束。
2.3构造分析方法与例题
教学要求
熟练掌握几何构造分析的各种方法。
2.3.1基本分析方法
1.组装法
规律:
一点、两片、三片、三链杆;
基本装配格式:
固定一个结点;固定一个刚片;固定两个刚片;固定三个刚片;
(1)从基础开始
例1:
图2-15
分析:
对象:
刚片
(1)与大地;联系:
铰A和链杆1且三铰不共线;――组成大刚片1;
对象:
大刚片1与刚片
(2);联系:
铰B和链杆2且三铰不共线;――组成大刚片2;
对象:
大刚片2与刚片(3);联系:
铰C和链杆3且三铰不共线;――几何不变无多余约束
(2)从内部
例2:
图2-16
分析:
对象:
刚片
(1)与
(2)(三角形法则);联系:
铰A和链杆1且三铰不共线;--组成大刚片1;
对象:
大刚片1与大地;联系:
铰B和链杆2且三铰不共线;――几何不变无多余约束
2.减二元体
例3:
图2-17
分析:
对象:
杆1、2和杆3、4和杆5、6和杆7、8和杆9、10和杆11、12和杆13、14;
联系:
二元体;去掉二元体,剩下大地――几何不变无多余约束
图2-18
分析:
对象:
杆1、2和杆3、4和杆5、6;
联系:
二元体;去掉二元体,剩下图2-16c――几何不变无多余约束
3.约束等效代换
(1)曲(折)链杆等效为直链杆
(2)联结两刚片的两链杆等效代换为瞬铰
图2-19
分析:
图2-19a等效图2-19b
对象:
大地与刚片
(1)和
(2);
联系:
大地与刚片
(1):
虚铰B;大地与刚片
(2):
虚铰C;刚片
(1)与刚片
(2):
虚铰A;三铰不共线――几何不变无多余约束
2.3.2复杂体系
1.运用瞬铰并使对象拉开距离
[注释]“拉开距离”是指三刚片之间均由链杆形成的瞬铰相连,而尽量不用实铰。
图2-20
分析:
对象:
大地与刚片
(1)和
(2);刚片
(2)为三角形。
联系:
大地与刚片
(1):
虚铰A(链杆1、2);大地与刚片
(2):
虚铰C(链杆5、6);刚片
(1)与
(2) 虚 铰B(链杆3、4);三铰不共线――几何不变无多余约束
图2-21
分析:
对象:
刚片
(1)、
(2)和(3);刚片
(1)、
(2)为三角形。
联系:
刚片
(1)与
(2):
虚铰A(链杆1、2);刚片
(1)与(3):
虚铰B(链杆3、4);刚片
(2)与(3):
虚铰C(链杆5、6);三铰不共线――几何不变无多余约束
2.三刚片由三铰两两相连,其中两瞬铰在无穷远处。
若此两瞬铰在不同方向,则体系几何不变,反之几何可变。
图2-22
分析:
图2-22a
对象:
刚片
(1)、
(2)和(3);
联系:
刚片
(1)与
(2):
铰A;刚片
(1)与(3):
虚铰B(无穷远);刚片
(2)与(3):
虚铰C(无穷远);两瞬铰在不同方向――几何不变无多余约束
分析:
图2-22b
对象:
刚片
(1)、
(2)和(3);
联系:
刚片
(1)与
(2):
铰A;刚片
(1)与(3):
虚铰B(无穷远);刚片
(2)与(3):
虚铰C(无穷远);两瞬铰在同一方向――几何可变
图2-23
分析:
对象:
刚片
(1)、
(2)和(3);
联系:
刚片
(1)与
(2):
铰A;刚片
(1)与(3):
虚铰B(无穷远);刚片
(2)与(3):
虚铰C(无穷远);两瞬铰在不同方向――组成大刚片1
对象:
大刚片1与大地;联系:
铰D和链杆5且三铰不共线;――几何不变无多余约束
3.三刚片由三瞬铰两两相连,若三瞬铰均在无穷远处,则体系几何可变。
[注释]无穷远处所有点均在一无穷远直线上
图2-23
分析:
图2-24a
对象:
刚片
(1)、
(2)和(3);
联系:
刚片
(1)与
(2):
铰A(无穷远);刚片
(1)与(3):
虚铰B(无穷远);刚片
(2)与(3):
虚铰C(无穷远);链杆3~6在同一平行线间――常变体系
分析:
图2-24b
对象:
刚片
(1)、
(2)和(3);
联系:
刚片
(1)与
(2):
铰A(无穷远);刚片
(1)与(3):
虚铰C(无穷远);刚片
(2)与(3):
虚铰B(无穷远);――瞬变体系
2.4平面杆件体系的自由度计算
教学要求
掌握实际自由度分析方法,了解计算自由度的计算方法。
2.4.1平面杆件体系自由度
(1)实际自由度S(即前面讲的“运动自由度”):
体系运动时,可以独立变化的几何参数数目,也就是确定该体系运动所需要的独立参数数目。
之所以称之为实际自由度,是为了与下面讲的计算自由度相区别。
S=(各部件自由度总和a)-(必要约束数总和c)(2-1)
(2)计算自由度W
W=(各部件自由度总和a)-(全部约束数总和d)(2-2)
由上式可见,计算自由度是由体系部件的自由度和全部约束计算而得,但没有区别非多余约束和多余约束。
因此,一般地说,计算自由度不一定就是实际自由度。
多余约束数n:
等于实际自由度与计算自由度之差,即:
n=S-W(2-3)
图2-25
分析:
自由度S=a-c=2-2=0;计算自由度W=a-d=2-4=-2
[讨论]:
W>0则S>0几何可变
W=0则S=n若n=0几何不变
W=0则S=n若n>0几何可变
W<0则n>0体系有多余约束,但不一定几何不变。
结论:
W≤0只是几何不变的必要条件,不是充分条件。
各部件自由度总和a=2(1个自由点);约束总数d=4;其中:
非多余约束c=2;
2.4.2约束的计算
(1)刚片内部多余约束。
n=0 n=1 n=2 n=3
图2-8刚片内部多余约束
[注释]自由端n=0;一根链杆n=1;一个铰n=2;一个刚结n=3;
(2)单约束和复约束
a.铰结点
图2-9a单铰 图2-9b复铰
1单铰=2个约束复铰=(n-1)单铰=2(n-1)个约束
b.刚结点
图2-11a单链 图2-11b复链
1单链杆=1个约束1复链杆=(2×n-3)单链=(2×n-3)个约束杆
2.4.3平面体系的计算自由度W的求法
(1)刚片法:
体系看作由刚片组成,铰结、刚结、链杆为约束。
刚片数m;
约束数:
单铰数h,简单刚结数g,单链杆数b。
W=3m-2h-3g-b(2-4)
(2)节点法:
体系由结点组成,链杆为约束。
结点数j;
约束数:
链杆(含支杆)数b。
W=2j–b(2-5)
(3)组合算法
约束对象:
刚片数m,结点数j
约束条件:
单铰数h,简单刚结数g,单链杆(含支杆)数b
W=(3m+2j)-(3g+2h+b)(2-6)
例:
求如下图示刚片系的计算自由度。
题1:
图2-12
解:
方法1 方法2 方法3
方法1:
(刚片法)
m=7,h=4,g=2,b=6
W=3×7-2×4-3×2-6=1
方法2:
(刚片法)
m=5,h=4,g=0,b=6
W=3×5-2×4-6=1
方法3:
(节点法)――最好
j=6,b=11
W=2j-b=2*6-11=1
题2:
图2-13
解:
方法1 方法2
方法1:
(节点法)――最好
j=7,b=14
W=2j-b=2*7-14=0
方法2:
(刚片法)
m=7,h=9,g=0,b=3
W=3×7-2×9-3=0
题3:
图2-14
解:
方法1:
(刚片法)
m=1,h=0,g=3,b=4
W=3×1-3×3-4=-10
方法2:
(节点法)――最好
j=0,b=10
W=2j-b=0-10=0
 升级会员
升级会员 