链斗式连续卸船机 讲义.docx
《链斗式连续卸船机 讲义.docx》由会员分享,可在线阅读,更多相关《链斗式连续卸船机 讲义.docx(47页珍藏版)》请在冰豆网上搜索。
链斗式连续卸船机讲义
链斗式连续卸船机操动机构是链斗式连续卸船机的重要组成部分,它由储能单元、控制断路器的操动机构有多种型式,如弹SF6单元、和力传递单元组成。
高压簧操动机构、气动机构、液压机构、液压弹簧机构等。
产品选用弹簧机根据灭弧室承受的电压等级和开断电流的差异,SF6构、气动机构或液压机构。
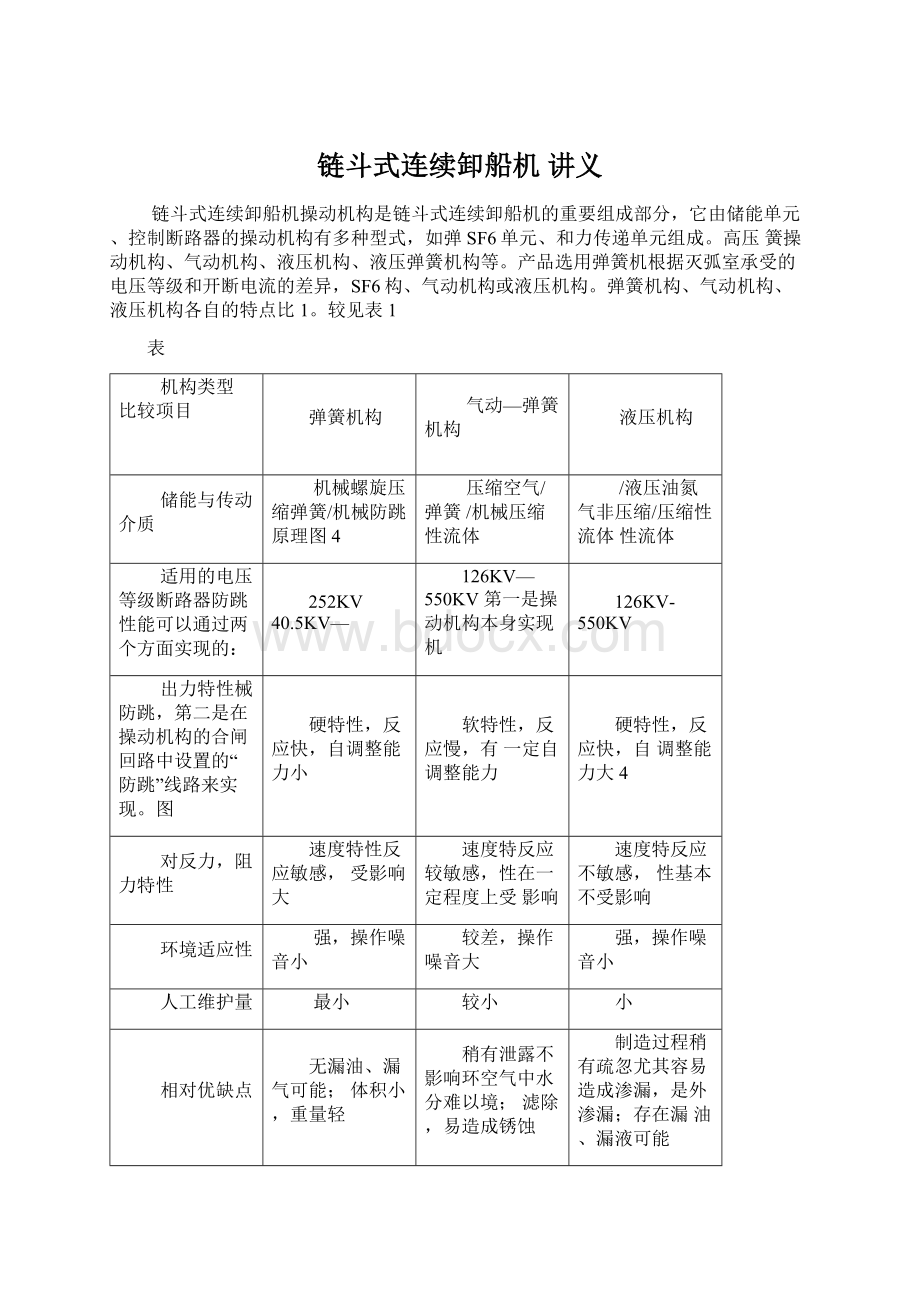
弹簧机构、气动机构、液压机构各自的特点比1。
较见表1
表
机构类型比较项目
弹簧机构
气动—弹簧机构
液压机构
储能与传动介质
机械螺旋压缩弹簧/机械防跳原理图4
压缩空气/弹簧/机械压缩性流体
/液压油氮气非压缩/压缩性流体性流体
适用的电压等级断路器防跳性能可以通过两个方面实现的:
252KV40.5KV—
126KV—550KV第一是操动机构本身实现机
126KV-550KV
出力特性械防跳,第二是在操动机构的合闸回路中设置的“防跳”线路来实现。
图
硬特性,反应快,自调整能力小
软特性,反应慢,有一定自调整能力
硬特性,反应快,自调整能力大4
对反力,阻力特性
速度特性反应敏感,受影响大
速度特反应较敏感,性在一定程度上受影响
速度特反应不敏感,性基本不受影响
环境适应性
强,操作噪音小
较差,操作噪音大
强,操作噪音小
人工维护量
最小
较小
小
相对优缺点
无漏油、漏气可能;体积小,重量轻
稍有泄露不影响环空气中水分难以境;滤除,易造成锈蚀
制造过程稍有疏忽尤其容易造成渗漏,是外渗漏;存在漏油、漏液可能
1
一.弹簧操动机构
弹簧操动机构是一种以弹簧作为储能元件的机械式操动机构。
弹簧的储能借助电动机通过减速装置来完成,并经过锁扣系统保持在储能状态。
开断时,锁扣借助磁力脱扣,弹簧释放能量,经过机械传递单元使触头运动。
弹簧操动机构结构简单,可靠性高,分合闸操作采用两个螺旋压缩弹簧实现。
储能电机给合闸弹簧储能,合闸时合闸弹簧的能量一部分用来合闸,另一部分用来给分闸弹簧储能。
合闸弹簧一释放,储能电机立刻给其储能,储能时间不超过15s(储能电机采用交直流两用电机)。
运行时分合闸弹簧均处于压缩状态,而分闸弹簧的释放有一独立的系统,与合闸弹簧没有关系。
这样设计的弹簧操动机构具有高度的可靠性和稳定性,既可满足O-0.3sec-CO-180sec-CO操作循环,又可满足CO-15sec-CO操作循环,机械稳定性试验达10000次。
1.1CT20弹簧操动机构动作原理
CT20型弹簧操动机构(图1、图2、图3)利用电动机给合闸弹簧储能,断路器在合闸弹簧的作用下合闸,同时使分闸弹簧储能。
储存在分闸弹簧的能量使断路器分闸。
1.1.1分闸动作过程
图1所示状态为开关处于合闸位置,合闸弹簧已储能(同时分闸弹簧也已储能完毕)。
此时储能的分闸弹簧使主拐臂受到偏向分闸位置的力,但在分闸触发器和分闸保持掣子的作用下将其锁住,开关保持在合闸位置。
2
)1分闸操作(图、2分闸信号使分闸线圈带电并使分闸撞杆撞击分闸触发器,分闸触发器以顺时针方向旋转并释放分闸保持掣子,分闸保持掣子也以顺时针方向旋转A释放主拐臂上的轴销,分闸弹簧力使主拐臂逆时针旋转,断路器分闸。
合闸操作过程1.1.2(分闸弹簧所示状态为开关处于分闸位置,此时合闸弹簧为储能2图已释放)状态,凸轮通过凸轮轴与棘轮相连,棘轮受到已储能的合闸弹簧力的作用存在顺时针方向的力矩,但合闸触发器和合闸弹簧储能保持掣子3
的作用下使其锁住,开关保持在分闸位置。
合闸操作(图2、3)
合闸信号使合闸线圈带电,并使合闸撞杆撞击合闸触发器。
合闸触发器以顺时针方向旋转,并释放合闸弹簧储能保持掣子,合闸弹簧储能保持掣子逆时针方向旋转,释放棘轮上的轴销B。
合闸弹簧力使棘轮带动凸轮轴以逆时针方向旋转,使主拐臂以顺时针旋转,断路器完成合闸。
并同时压缩分闸弹簧,使分闸弹簧储能。
当主拐臂转到行程末端时,分闸触发器和合闸保持掣子将轴销A锁住,开关保持在合闸位置。
1.1.3合闸弹簧储能过程
图3所示状态为开关处于合闸位置,合闸弹簧释放(分闸弹簧已4
储能)。
断路器合闸操作后,与棘轮相连的凸轮板使限位开关33HB闭合,磁力开关88M带电,接通电动机回路,使储能电机启动,通过一对锥齿轮传动至与一对棘爪相连的偏心轮上,偏心轮的转动使这一对棘爪交替蹬踏棘轮,使棘轮逆时针转动,带动合闸弹簧储能,合闸弹簧储能到位后由合闸弹簧储能保持掣子将其锁定。
同时凸轮板使限位开关33HB切断电动机回路。
合闸弹簧储能过程结束。
5
1.2机械防跳原理
:
介绍了机械防跳装置的原理,其动作过程如下所示状态为开关处于分闸位置,此时合闸弹簧为储能(分闸图a)1.
弹簧已释放)状态,凸轮通过凸轮轴与棘轮相连,棘轮受到已储能的合闸弹簧力的作用存在顺时针方向的力矩,但合闸触发器和合闸弹簧储能保持掣子的作用下使其锁住,开关保持在分闸位置。
当合闸电磁铁被合闸信号励磁时,铁心杆带动合闸撞杆先压下防.)2.合闸触发器以顺时针方向旋转,并释放合闸弹跳销钉后撞击合闸触发器。
6
簧储能保持掣子,合闸弹簧储能保持掣子逆时针方向旋转,释放棘轮上的轴销B。
合闸弹簧力使棘轮带动凸轮轴以逆时针方向旋转,使主拐臂以顺时针旋转,断路器完成合闸。
3).滚轮推动脱扣器的回转面,使其进一步逆时针转动。
从而,脱扣器使脱扣杆顺时针转动(见图4b),从防跳销钉上滑脱,而防跳销钉使脱扣杆保持倾斜状态(见图4c).
4).断路器合闸结束,合闸信号消失电磁铁复位(见图4d).
5).如果断路器此时得到了意外的分闸信号开始分闸,在分闸在这一过程中,只要合闸信号一直保持,脱扣杆由于防跳销钉的作用始终是倾斜的,从而铁心杆便不能撞击脱扣器,因此,断路器不能重复合闸操作(见图4e)实现防跳功能。
当合闸信号解除时,合闸电磁铁失磁,铁心杆通过电磁铁内弹簧返回,则铁心杆和脱扣杆均处于图4a状态,为下次合闸操作作好了准备。
1.3弹簧操作机构的组成
弹簧操作机构主要由箱体、二次控制部分、机构芯架组成。
1.3.1)箱体
主要是将二次控制部分、机构芯架部分保护在相对封闭的空间,箱体防护等级为IP54。
1.3.2)二次控制部分
操动机构箱内,带有完善的二次控制和保护回路,如储能电机的过载,超时等保护信号,就地、远方操作选择,自带防跳回路及SF6气体密度监测系统。
7
1.3.3)机构芯架
主要构成:
凸轮轴装配—分闸机构装配—合闸机构装配—合闸弹簧装配—分闸弹簧装配—操作机构总装。
1.3.3.1凸轮轴装配
凸轮轴装配由棘轮装配、微动开关装配和离合器等构成,完成合闸弹簧储能的功能,通过微动开关实现对储能电机的控制。
1.3.3.2分闸机构装配
分闸机构装配由分闸电磁铁、拐臂、分闸掣子装配构成。
完成合闸位置的保持和接受分闸命令进行分闸操作。
1.3.3.3合闸机构装配
合闸机构装配由合闸电磁铁、防跳装置、合闸储能保持掣子装配等构成。
完成合闸弹簧储能后保持和接受合闸命令进行合闸操作。
1.3.3.4合闸弹簧装配
合闸弹簧装配包括合闸弹簧筒,拉杆,合闸弹簧等。
1.3.3.5分闸弹簧装配
分闸弹簧装配包括分闸弹簧,油缓冲器装配等
1.4弹簧机构的技术参数
1.4.1机构的参数见表2
表2
mm?
0.01弹簧机构活塞杆行程0100.0?
3.断路器处于分闸状2拐臂滚子和机构凸轮之间间隙1.4±0.3
按订货DC110/220
V
4电机电源电压
合同AC220300
电机功率5
W
8
储簧已态合闸弹合闸弹簧定位螺母与定位杆距12.0~47.0
3
8
能。
见图离5.5C~5.0合闸电磁铁行程2.5触发器与脱扣器间隙D~2.0断路器处于分闸状4
9
态。
见图3.5D
C-~3.02.5E~1.0触发器与防跳杆间隙3.2
分闸电磁铁行程F~2.8断路器处于合闸状1.2
0.8~5触发器与脱扣器间隙G
10
。
见图态2.4
F-~1.6G
控制回路与辅助回路参数1.4.23控制回路与辅助回路参数见表
3
控制回路与辅助回路参数表
备注数据单位项目序号
DC110V1分、合闸线圈控制电压DC220
25.8分闸线圈电流A2
A合闸线圈电流33.3
2
9750
r.p.m6电机转速2.7A75.5
电机电流
220V8
电压加热器100
功率W
气体压力参数1.4.3SF6为例以LW25-126SF气体压力参数随所配的产品,表4620℃)4(表
序号
项目
单位
数据
1
额定充气压力
MPa0.50
*0.40
MPa20.03补气报警压力0.35±0.45±0.03
MPa3
0.03
±±0.40断路器闭锁压力0.030.3031.5kA*0.40为低温使用开断电流注:
带
10
1.5配弹簧机构的断路器在运行中的故障处理见表5
表5
分类
估计主要原因不正常现象
调查事项及对策
1.1电源不良
检查控制电压U>80%Ue
1.2电气控制系统不良
控制线断线,端子松,障,辅助开关接点故障
合闸线圈故
1..
1.3SF6不能电气合闸足
气体压力不压力开关动作,
补气到额定压力
关合动
闭锁1.4弹簧未储能故障
电机回路电源故障,检查回路电压U>85%Ue
作的
电机过流或储能过时报警
异电机或机械系统故障
常手动关合合闸电磁铁,合闸1.5其它,检查电磁铁间隙
2.1电源不良
检查控制电压
U>60%Ue,端子松,分闸线圈故
电气控制系统不2.2
控制线断线
良SF62.3气体压力不2.不能电气分闸
障,辅助开关接点故障补气到额定压力
压力开关动作足,闭锁
气压控
其它2.4
手动关合分闸电磁铁电磁铁间隙
分闸,检查参考充气作业,
漏气力体3.SF6气压下
补气至额定压力
降制,63GA发出补气报警消除漏点,查找漏气点要领,系统异常
11
)现场使用中几个问题1.6)弹簧操作机构润滑脂的使用1.6.1而其本身又对传动摩擦等反力特别敏弹簧操作机构的传动零件较多,感,所以出厂时对诸如轴销,轴承,齿轮,弹簧筒等转动和直动产生相润滑脂。
在运行了六年后,一些润滑脂需重互摩擦的地方涂敷低温2#新涂敷。
注意棘轮齿面部和大小棘爪与棘轮接触处一定不要涂抹低温润滑脂,以防影响机构动作的准确性。
具体涂敷见图2#7。
图7
12
1.6.2)机构行程的检查和凸轮间隙的确认
手动慢分,慢合机构可以测量机构行程和本体行程见图8,测量值应符合表2的技术要求。
行程不够时,首先测量凸轮间隙,凸轮间隙越大,行程越小。
图8
1.6.3)电磁铁间隙的检查和调整
具体检查方法如下:
1.6.3.1测量合闸电磁铁配合间隙时,产品应处于分闸位置,操动机构应插入合闸防动销进行测量。
应符合表2的技术参数,见图9
1.6.3.2测量分闸电磁铁配合间隙时,产品应处于合闸位置,操动机构应插入分闸防动销进行测量。
应符合表2的技术参数,见图10
13
螺钉(9-3)螺母(9-2)合闸线圈铁芯(9-1)螺母(9-4
合闸线圈(9-7
铁芯(9-6S2=4.5~5.支合闸掣子(9-8G2=2.0~3.掣子(9-9G4=1.0~2.防跳跃肖(9-10合闸电磁铁的装配及调9
螺分闸线圈铁螺
螺分闸线
支铁S2=2.8~3.
G1=0.8~1.
分闸电磁铁的装配及调10
调整1.6.3.3
若出到达现场后不需要再进行调整。
电磁铁配合间隙在厂内已调整好,现异常,其调整方法如下:
,调-4-3,对称拧动螺钉9合闸电磁铁行程尺寸的调整:
松开螺母9整限位尺寸。
2-,拧动铁心杆,移动铁心撞头位置。
G尺寸的调整;松开螺母9,-310410分闸电磁铁行程尺寸的调整:
松开螺母-,对称拧动螺钉调整限位尺寸。
14
尺寸D、E的调整:
松开螺母10-2,拧动铁心杆,移动铁心撞头位置。
注意:
由于电磁铁的各配合间隙是相互联系的,所以每调一个尺寸,对其它尺寸应进行复查,直到全部合格为止,最终锁紧螺母。
1.6.4)微动开关和凸轮间隙的复查
微动开关和凸轮间隙,决定了储能电机的是否正确动作,用塞尺测量应符合图11的要求,即电机在未储能的状态下测量,7mm微动开关不切换,8mm微动开关切换。
11
图合闸弹簧手动储能的方法1.6.5
12
当电机回路失去电源时,合闸弹簧可手动储能其方法见图插入棘爪轴的六角头内,顺时针方向旋转套312-1和套板手-12将套杆就可将合闸弹簧储能-筒板手12315
B1B2操动机构
1.4.4分、合闸电磁铁配合间隙的检查但为了避免有误,合闸电磁铁的配合间隙,分、现场应进行复查和确认,复查间隙的参数要求见表..304±G=13棘爪轴;212-1套杆;12-
套筒板手;4-
9套管;-5
,图
现场一般不须进行调整,
12
2,具体位置见图
12
手动操作装置安装12图12-3
套板手;
轴承;12-10螺母;-起重杆;-盖板;12-6127机构箱;12-812912-12合闸弹簧储能示意11拐臂;12-
弹簧机构目前的发展趋势和国内外水平1.7断路器中得到了SF6进年来弹簧机构由于其本身众多的优点所决定在广泛的应用,尤其在用于操作功较小的自能式和半自能式灭弧室中,由于其体积小,操作噪音小,对环境无污染,耐气候条件好,免运行维护,可靠性高等一系列优点受到电力系统广大用户的推崇,是当前发展势头迅猛的一种断路器操作机构。
统计资料表明国产开关与进口开关在质量上的主要差别是在操动机构上,由操动机构造成的非计划停运占非计划停运总数国产开关与进口开关的非计划停运率相当。
扣除操动机构的影响,的63.2%,操作动构的专业化生产能提高国产开关的可靠性。
使我厂生产的开关与进口开关可靠性提高到同一水平。
16
二.气动-弹簧操动机构
SF6产品所配的气动操动机构是一种以压缩空气做动力进行分闸操
作,辅以合闸弹簧作为合闸储能元件的操动机构。
压缩空气靠产品自备的压缩机进行储能,分闸过程中通过气缸活塞给合闸弹簧进行储能,同时经过机械传递单元使触头完成分闸操作,并经过锁扣系统使合闸弹簧保持在储能状态。
合闸时,锁扣借助磁力脱扣,弹簧释放能量,经过机械传递单元使触头完成合闸操作。
所以该机构确切应为气动-弹簧操动机构。
气动-弹簧操动机构结构简单,可靠性高,分闸操作靠压缩空气做动力,控制压缩空气的阀系统为一级阀结构。
合闸弹簧为螺旋压缩弹簧。
运行时分闸所需的压缩空气通过控制阀封闭在储气罐中,,而合闸弹簧处于释放状态。
这样分,合闸各有一独立的系统。
储气罐的容量能满足这样设计的弹簧操动机构具有高度的可靠性和稳定性,既可满足O-0.3sec-CO-180sec
-CO操作循环,机械稳定性试验达一万次。
气动-弹簧操动机构根据灭弧室承受的电压等级和开断电流的差异,分为CQ6机构(日本三菱型号AM25)和CQ7机构(日本三菱型号AM32),
CQ6机构主要用于220KV及以下等级的产品,CQ7机构主要用于363KV和550KV等级的产品。
下面介绍220KV瓷柱式SF断路器用CQ6机构。
62.1断路器操动机构的技术数据见表6。
17
操动机构的技术数据表6
序号名称单位参DC220V分.1合闸操作控制电压A2分闸线圈电流合闸线圈电流3A
19Ω4分闸线圈电阻33合闸线圈电阻Ω5合闸回路数分6
/个AC380/2.2(50Hz)
V/kW
压缩机电源电压和电机功率7
或DC220/1.5
VAC220电源电压8加热器
功率2×W
额定操作空气压力9
1.50MPa
10断路器闭锁操作空气压力MPa11断路器重合闸闭锁压力12断路器解除重合闸闭锁空气压力13压缩机启动压力压缩机停止压力1415安全阀动作空气压力16安全阀复位空气压力17分闸铁心行程ST(见图脱扣杆间隙GT
22)
1.201.43
MPaMPaMPaMPaMPaMPammmm
1.46
1.451.551.701.452.00.5
DC1102.52.35%5%2/12501.801.552.40.9
~
18
ST-GT18合闸铁心行程脱扣板与闭锁杠杆间隙防跳跃间隙19活塞行程活塞超程
见图21)B3-B1
mmmm22)mmGC1mmmmmm
1.4~5.5~3.5~2.0~+1-3.01.0±
0.7
4.5SC(2.01.0GC2(见图140.0B1-B26.0
℃)7(20SF气体压力参数表6
数据单位序号项目*MPa0.60
10.50额定充气压力MPa20.030.45±0.55补气报警压力MPa
3
0.030.40±0.50
序号名称单位数值
2.0~mm2.4分闸电磁铁0.5~mm0.9(见图0.7~mm1.4合闸电磁铁2.0mm
~GC1
脱扣板与闭锁杠杆间隙3.5
(见图23)2.0GC2
防跳跃间隙mm~1.0mm活塞行程-BB13操动机构+1140.0-3.0
0.030.03*0.50参分闸铁心行程脱扣杆间隙配合间隙差值
±±
为低温使用开断电流STGTST-GT
40kA
断路器闭锁压力注:
带)23
合闸铁心行程
弹簧操动机构动作原理2.2CQ6型气动-弹簧操动-、图1415。
气动弹簧操动机构见图CQ6型气动-13、图
机构是由活塞和气缸组成的驱动机构,还包括控制压缩空气的控制阀,由电信号操纵的合闸和分闸电磁铁、以及合闸弹簧,缓冲器,分闸保持掣子、脱扣器等其它零部件。
分闸动作过程
由控制阀内弹簧在连板上产生的所示状态为开关处于合闸位置,图1319
顺时针方向的力矩被掣子在连板上产生的逆时针方向的力矩抵消,使控制阀不能动作,控制阀将压缩空气封闭在储气罐中,使压缩空气罐内的压缩不能通过.产品在合闸弹簧作用下保持合闸位置。
分闸操作(图13,14,15)
分闸信号使分闸线圈带电,并使分闸撞杆撞击分闸触发器,分闸触发器顺时针方向旋转,带动锁扣掣子逆时针方向旋转。
这样由控制阀内弹簧在连板上产生的顺时针方向的力矩将控制阀打开,将在储气罐中的压缩空气释放,压缩空气进入气缸,迫使活塞向下运动,通过传动系统打开动触头完成分闸操作,断路器分闸。
以下为具体动作原理。
20
13
图
由控制阀内弹簧在连板上产生的顺时针方向的见图(13).在合闸位置力矩被掣子在连板上产生的逆时针方向的力矩抵消,使控制阀不能动作,使压缩空气罐内的压缩不能通过.产品在合闸弹簧作用下保持合闸位置21
14
图15)分闸操作的过程如下:
(图14,.分闸信号使分闸电磁铁通电a
掣子由两个连杆和三根短撞击掣子。
分闸电磁铁的动铁芯向下运动,b.
白色轴连接着两个连杆,两根黑色轴将两个连杆分别连在机架上。
轴组成掣子右侧的连杆在铁芯的撞击下顺时针旋转,左侧的连杆反时针旋转,因而连板和掣子的约束被释放。
.连板顺时针转动,使控制阀在其内部弹簧力的作用下打开。
c
d.压缩空气罐内的压缩空气进入气缸。
断路器分闸。
.e压缩空气推动活塞向下与活塞相连的动触头被带动,22
f.在分闸操作的最后阶段,连板被与活塞相连的凸轮下压,使控制阀又回到合闸位置状态。
气缸内的空气通过排气口排出。
最后轴“屁被分闸保持掣子锁住,断路器分闸操作完成。
在分闸操作时,合闸弹簧由活塞作功储能。
图15
合闸操作(图15)
图15所示状态为开关处于分闸位置。
在分闸位置,断路器是由通过连接在机架上的分闸保持掣子在机械上锁住。
分闸保持掣子受到由合闸弹簧力产生的反时针方向的力矩作用,此时其又与脱扣器和自身轴销构成“死点”结构产生顺时针方向力矩,保持产品的分闸状态。
23
触头合闸需要的功是从合闸弹簧取得的。
当轴“A”3被释放,活塞由合闸弹簧驱动向上经传动系统使动触头闭合。
合闸操作过程如下:
a.合闸信号使合闸电磁铁通电。
b.合闸电磁铁的铁芯向下撞击脱扣器.
c.脱扣器和分闸保持掣子之间的“死点'状态解除.
d.分闸保持掣反时针转动,轴“A”从分闸保持掣于的约束中释放。
e,活塞和动触头由合闸弹簧驱动向上完成合闸。
重合闸操作:
断路器的重合闸操作是依靠断路器分闸后,其气动机构的传动系统与控制回路能迅速地恢复到准合闸状态,然后在重合闸继电器(在主控室)的控制下断路器再次合闸。
如果短路故障已经解除,则重合闸成功,断路器继续正常运行,如果短路故障尚来解除,则关合后立即(但不小于40ms)分闸,进行一次不成功的重合闸操作。
断路器的机械防跳原理:
(图16)
断路器防跳性能可以通过两个方面实现的.第一是操动机构本身实现机械防跳,第二是在操动机构的合闸回路中设置的“防跳”线路来实现。
有时开关在设计院设计中已经有电气防跳,故为防止冲突,可将我厂产品中的电气防跳回路解除。
目前在CQ6型操动机构上装有一个机械防跳装置。
图16介绍了机械防跳装置的原理,其动作过程如下:
a.分
 升级会员
升级会员 