控制阀延迟和死区对简单液压定位系统稳定性的影响外文文献翻译中英文翻译.docx
《控制阀延迟和死区对简单液压定位系统稳定性的影响外文文献翻译中英文翻译.docx》由会员分享,可在线阅读,更多相关《控制阀延迟和死区对简单液压定位系统稳定性的影响外文文献翻译中英文翻译.docx(21页珍藏版)》请在冰豆网上搜索。
控制阀延迟和死区对简单液压定位系统稳定性的影响外文文献翻译中英文翻译
附录1:
外文翻译
控制阀延迟和死区对简单液压定位系统稳定性的影响
本文研究了高度简化液压缸动力学模型的PI控制问题。
首先假定液压流体是不可压缩的,泵提供恒定流量、压力,这就提供速度控制的可能性。
两种可能的意外情况会发生,其一是系统内由于控制器计算和内部压力变化而导致的延时,以及控制阀的死区,该影响在非线性系统中得到了确认。
本文通过分段线性不连续映射。
研究了系统的非线性行为,实际上,确定了全局稳定的参数域。
1.介绍
液压系统广泛应用于重型工业应用领域,在这方面发挥着很大的作用。
在一个健壮的方式中,需要高强度的高强度。
虽然有很多。
努力开发先进的控制策略,如1-4,PID控制仍然是。
最受欢迎的选择。
然而,众所周知,在这些中有很强的非线性。
系统,如压力流量关系,控制阀的死区,如图1所示,干摩擦3或影响动力学5。
闭环控制的离散采样时间。
由于内部的主要原因,引入了额外的复杂性和响应延迟。
动态压力。
因此,设计和调整液压系统的PID控制器是。
一个极具挑战性的任务主要是因为传统的方法是基于线性系统的。
理论。
此外,上述的一些非线性,如死区或影响。
动力学不能用线性化技术来解决。
这些系统的数学模型常常导致非光滑方程。
甚至是不连续的右手边。
幸运的是,在非光滑理论方面的进展。
动态系统可以看到例如,的概述提供了一个工具箱,尽管它仍然很远。
这对于更高维度的系统尤其如此,等多个不同的动态区域。
例如,7给出了一个一般的理论。
一种具有轻微的双线性一维映射的周期和密集轨道的存在。
向二维映射扩展,延迟和反弹。
经过研究。
在n维图中,边界碰撞分岔与两个区域。
混沌振荡也在这些系统中被识别。
在数值模拟的基础上,描述了PI举例说明延迟和反弹的影响。
本文研究了一种高度简化的液压定位系统模型,尽管从工程的角度来看,它的简洁性和线性度很有趣。
2.数学模型
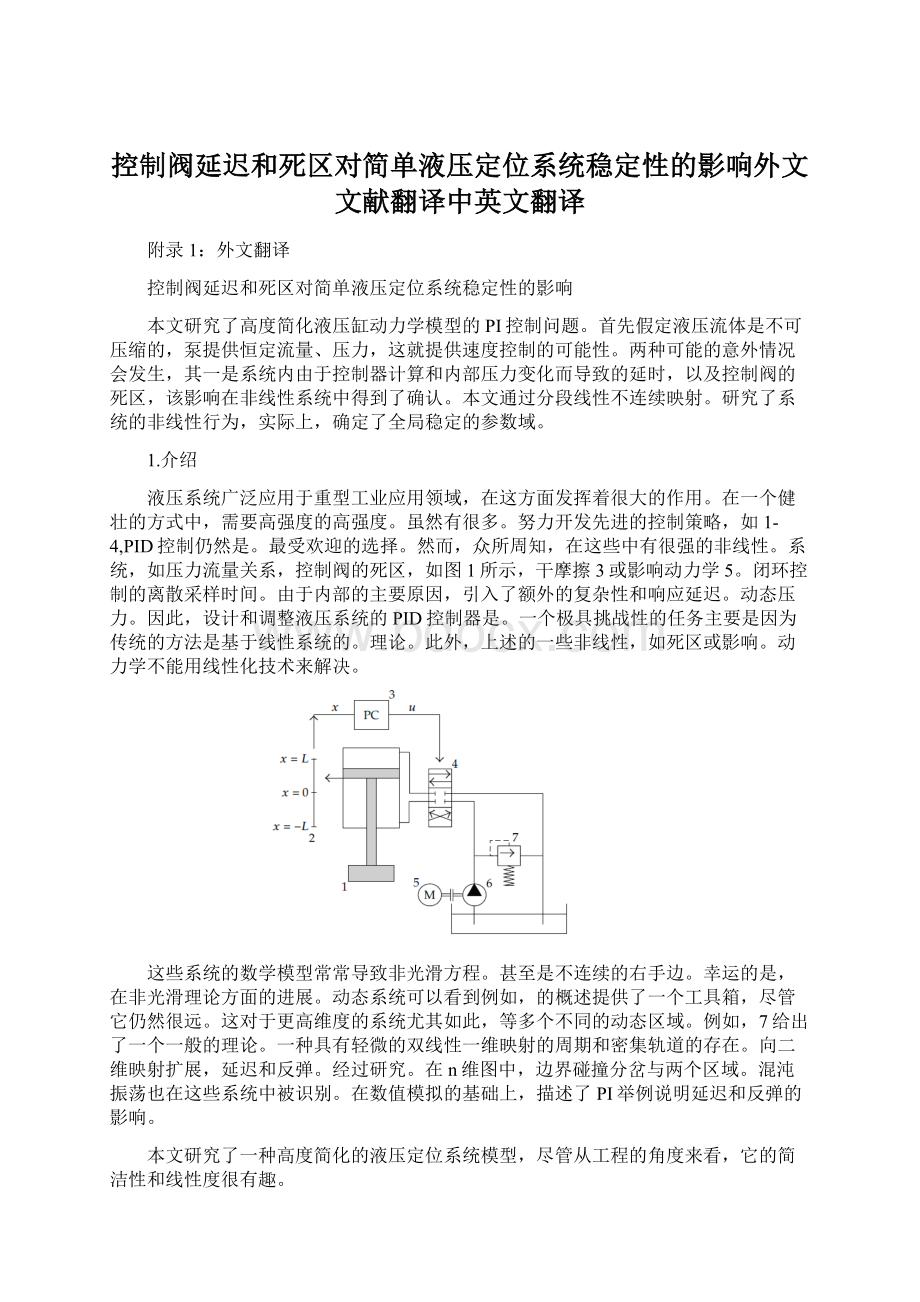
我们调查的对象是一个由数字控制的液压系统。
差动液压缸,比例换向阀,线性电位器。
位置传感器,齿轮泵,和PC。
PC提供了比例积分。
控制器。
它接收来自位置传感器的信号,计算错误信号,以及。
驱动液压阀;参见图1。
方向比例的典型特征。
阀门如图2所示。
研究中忽略了活塞的质量和牛顿力学。
在活塞密封处不考虑摩擦力,进一步简化了系统。
杆。
显然,后者对系统的非线性动力学有重要影响。
由于小的正或负阻尼值。
当我们进行调查时。
在零阻尼的情况下,我们分析了已经呈现出复杂动力学的临界情况。
由于建模的延迟,死区和采样。
连续物理过程采样时间间隔ts采样时间,因此,在xnxnts时,将活塞杆xt的位置离散化。
这个位置被输入了。
计算错误信号h的PC。
这个计算所需的时间表示。
tc。
由于液压系统的内部动力学,特别是压力动力学,
活塞杆速度的变化遵循了第二种甚至更高的顺序滞后。
由tid表示的另一个延迟表示的系统,用下标表示。
内部动力。
因此,在前一个采样时刻和它的之间的总延迟。
效果是tdtc。
注意,tc和tid的实际值和比率是不相关的。
自牛顿动力学被忽略了,活塞的速度是分段常数,它可以。
在以下方式:
离散vnt≡vn−1tstd,t∈n−1tstd,ntstd,因此,下标n表示位置和速度的不同时间序列。
在图3的控制方案中表示。
假设情况下当我们有0≤td≤ts。
整合分段常数速度,我们到达了两个相邻抽样活塞杆之间的关系。
位置,可以表示为。
xn_1_xn_vntd_vn_1_ts−td_.
虽然这个表达式类似于控制方程的euler-离散化,但它是这样的。
离散形式是对实际物理系统进行数字化控制的精确解。
考虑比例积分控制器,误差信号hn以下列形式计算:
hn_Pxn_Iyn,
P是比例增益I是整数1,然后
yn_yn−1_tsxn−1
是位置函数的离散积分。
活塞杆速度vn1和vn。
由hn和hn计算。
1、分别根据简化的特征。
比例方向阀。
图4表示这个减少的,不饱和的。
特征。
关闭的时间间隔是.Δ,Δ斜率是.α的特征。
引入无量纲变量
在后面的部分中,我们将构建一个4维的线性映射。
backlash-free系统。
在出现反弹的情况下,我们推导出一个分段线性。
从第4维度的9个线性映射中编译的映射。
如果你也调查。
casetd>ts,然后类似的线性和分段线性映射可以构建,但是它们。
尺寸增加极。
为了用简洁的数学方法来表示方法。
形式,我们限制描述基本情况0≤td≤ts。
3.线性系统的稳定性分析
消除阀死区δ0,一个线性阀特点意味着有关活塞杆的速度:
vn_−hn−1,
xn_1_xn−hn−1td−hn_ts−td_.
引入zn,它由实际和先前的活塞位置和积分组成
用矩阵形式:
系统的稳定性取决于矩阵A的特征值,所有的绝对值。
特征值必须小于1:
矩阵A的特征多项式是:
多项式有一个根,等于0;因此;它可以除以μ/μ40。
由于多项式的稳定性准则决定了多项式的系数,所有的根都应该在复杂矩阵的左边,运用莫比斯变换:
作为变换的结果,特征值的绝对值的情况。
矩阵A小于1等于变换后的多项式的根的情况。
复杂式的左侧:
变换特征多项式是:
系数是:
根据柔丝稳定性判据,所有多项式系数均为3.11。
矩阵H23.13的行列式应该是正的:
此外,一个条件以下式子也应满足稳定性要求:
在上面的公式中,连续使用扩展,当td→ts/2。
图5给出了线性系统在采样时刻的参数稳定图。
不同的时间延迟在td0,ts。
很容易证明稳定性边界。
是td0时的直线。
左边的稳定边界,|μ1|<1|μ2,3|1。
它可以也表明,只存在这种类型的稳定边界时td≥ts/4。
最右边的td当系统被过度确定时μ4=0。
4.分段线性系统的动力学分析
根据之前的公式,xn1的即将到来的值取决于实际的vn1和之前的vn速度值。
考虑到方程2.5,xn1是分段线性两次错误信号的函数hnhn−1。
因为每个过去的值可以分为3个情况,我们的系统由9个标量方程描述。
分段系统可以写成紧凑形式,其中Fi是一个线性算子,简化的矩阵形式:
zn_1_Aizn_bi_Fi_zn_,i_1,...,9.
根据前文公式,在x-y中3个域的hn结果的3个区间
x-y平面的三个域,在中间区域误差信号小于阈值。
这个阀门,没有活塞运动
上图表示x-y平面与中间区域的死区。
死区,x是恒定的,这意味着活塞杆停止,因为比例方向。
阀是关闭的。
固定的点在y轴上,在[−δ/I,δ/I]。
这个不变的集合对应的是无反线性系统的平凡解。
从实际我们对不变集的稳定性很感兴趣,因为它的实际值。
如果我们能达到期望的x0位置,y就不重要了。
4.1周期轨道
通过采样时间ts0.1s,时间延迟td0.04s进行数值模拟,和无量纲死区δ12。
通过求解所示的代数方程组。
公式中,从初始条件z2x2x1y2y1T1111T开始系统。
积分增益Icr24.982和正比增益Pcr3.5714,一个周期。
轨道存在,且不变集对Pcr这行为类似于退化的Hopf分岔,既不是子也不是超临界的。
图7表示稳定的、不稳定的运行和一个周期性的轨道,它们存在于其中。
关键的情况。
根据上图所示的仿真结果,对不同的修改死区进行了分析。
大小,周期轨道仍然是周期性的或者它变成了准周期密集轨道。
图9表示一般情况下的周期轨道。
点的编号从死区以外的第一步开始;k是上面的步数地区;j是死区内步数的一半。
因为它是对称的系统,对半周期轨道的检查是令人满意的,与终点有关。
第一步是从第2点到第3点。
在这种情况下,h2>δ和h1>δ,因此F1是用来计算点3号,就像在下一个k−1步骤。
作为我们到达死区,根据表1,F4是应用于边界,然后F5j−1次了。
最后一步,直到半周期由F8完成。
因此,形成的一般式:
我的意思是用Fi运算符k次
使用式4.8,可以产生如下的周期轨道。
我们把td,ts,和。
初始条件x1,y1和轨道的“形状”与k和j,然后通过解第二个。
第4个分量是48P,我可以计算出,x2和y2很容易。
确定。
图10显示了三个可选的周期轨道。
4.2稳定的周期轨道
我们可以将公式4.8简化为一次操作,引入A和b:
44.9所示动力系统的稳定性取决于特征值。
矩阵A。
由于没有显式地出现在A中,不变集的稳定性边界。
包括在系统中所期望的x0位置与死区相一致的稳定性。
线性系统的边界,线性阀特性在第3节中导出。
然而如果A的结构足够大,A的结构会发生变化,这样它仍然会影响稳定性地区。
在图11的左侧面板中,有3对这些控制参数P,表示为线性稳定性的极限,在这里,周期轨道如图10所示。
请注意,用前面描述的方法计算了它们的数值。
图12显示了三个不同值的三个周期或密集轨道的行为。
P表示在图11的右边面板中。
正如上面所示,这是稳定的。
线性系统由不变量集保留,其中包含x0在系统中的死区。
这意味着所有的轨道都将向外呈螺旋状向外或向不稳定的方向移动。
稳定的线性行为,不管轨道是周期性的还是密集的p的值,换句话说,对于每一个矩阵的组合,Ai对应于任意一个轨道的种类,其特征值在稳定性方面类似。
在相空间中这意味着死区内的轨迹完全是垂直的,不会改变。
当轨道进入并离开死亡区域时,x的值与步数无关。
粗略地说,死区只是“削减”和“提取”已经存在的轨道。
这也解释了为什么轨道与死区的行为类似于无背景的情况。
需要进一步的研究来研究这些动态特性是如何变化的。
由阻尼引起的轻微扰动。
这很可能是上述结构。
周期和密集的轨道将无法生存,但其中一些可能存在于线性稳定或不稳定的域,取决于阻尼是否有轻微的正面或消极的影响。
5.结论
本文研究了带圆柱的液压定位系统的PI控制。
强调数字采样的相互作用,由于有限的计算而导致的时间延迟。
时间和内部动力,以及由于阀门特性影响到全系统的反弹。
控制系统的动力学。
无反流系统的稳定边界为在P上,我控制参数平面。
然后,它是表明动力学是由一个有9个可能状态的分段线性系统描述的。
由强烈反对引起的。
它显示了周期和稠密的轨道。
当参数调整到稳定边界时,系统是否存在backlash-free系统。
提出了一种分析方法,对给定的开关序列进行初始化。
条件,采样和延迟时间,以及死区宽度,允许计算。
对应的P和I参数保证了周期轨道的存在。
此外,它是证明了分段线性系统的线性系数矩阵是独立的。
在死区宽度中,周期或密集轨道的稳定性也是如此。
换句话说,线性系统的稳定性边界为系统提供了一个实用的稳定裕度与反弹。
附录2:
外文原文
 升级会员
升级会员 