激光测振原理及应用.pdf
《激光测振原理及应用.pdf》由会员分享,可在线阅读,更多相关《激光测振原理及应用.pdf(15页珍藏版)》请在冰豆网上搜索。
470第17章激光测振原理及应用振动特性的测量和分析是鉴别和确定机器、元部件工作可靠性的重要手段。
常用的测振技术是接触式测量。
在被测物体上安装加速度传感器,利用加速度传感器的电荷输出信号实现加速度速度位移的相关测量。
如果测量质量较小物体的振动,附加的加速度传感器的质量往往会影响被测物体的振动,从而产生测量误差。
设计和开发新型的非接触式、高精度、实时性的测振技术一直是工程科学和技术领域中的重要课题和任务。
激光全息方法、激光多普勒测振就是新型的空间分辨率很高、非接触式的测量技术。
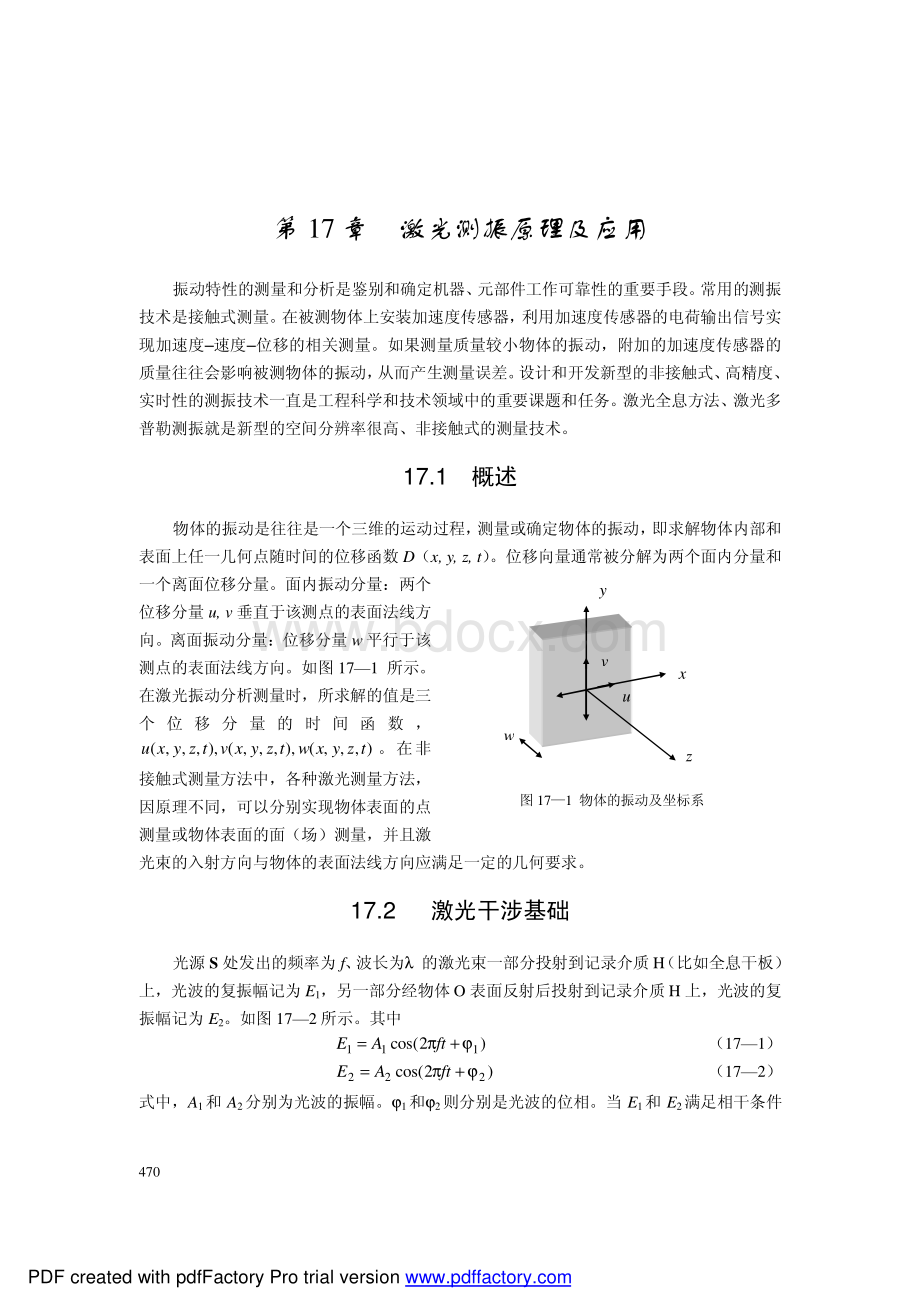
17.1概述物体的振动是往往是一个三维的运动过程,测量或确定物体的振动,即求解物体内部和表面上任一几何点随时间的位移函数D(x,y,z,t)。
位移向量通常被分解为两个面内分量和一个离面位移分量。
面内振动分量:
两个位移分量u,v垂直于该测点的表面法线方向。
离面振动分量:
位移分量w平行于该测点的表面法线方向。
如图171所示。
在激光振动分析测量时,所求解的值是三个位移分量的时间函数,),(),(),(tzyxwtzyxvtzyxu。
在非接触式测量方法中,各种激光测量方法,因原理不同,可以分别实现物体表面的点测量或物体表面的面(场)测量,并且激光束的入射方向与物体的表面法线方向应满足一定的几何要求。
17.2激光干涉基础光源S处发出的频率为f、波长为的激光束一部分投射到记录介质H(比如全息干板)上,光波的复振幅记为E1,另一部分经物体O表面反射后投射到记录介质H上,光波的复振幅记为E2。
如图172所示。
其中)2cos(111+=ftAE(171))2cos(222+=ftAE(172)式中,A1和A2分别为光波的振幅。
1和2则分别是光波的位相。
当E1和E2满足相干条件图171物体的振动及坐标系uvwyzxPDFcreatedwithpdfFactoryProtrialversion471时,其光波的合成复振幅为E)2cos()2cos(222221+=+=ftAftAEEE(173)光强分布为I)2cos()2cos
(2)2(cos)2(cos2121222212212+=ftftAAftAftAEI)cos()4cos()2(cos)2(cos2121212122221221+=AAftAAftAftA(174)式(174)的四项中,前三项均为高频分量。
只有第四项为低频分量,且与物体表面的状态有关。
第四项的含义是2所代表的物体表面与1所代表的参考面之间的相对变化量。
在激光位移测量方法(全息干涉、激光散斑、云纹干涉、激光多普勒测振等)中,都是通过处理和分析物体表面与参考面(物体表面)在变形前后的位相变化、光强变化等,从而实现高精度的振动位移测量。
17.3时间平均全息方法激光测振以其非接触测量、精度高等优点,已在振动测量领域得到广泛应用。
在全息干涉计量学中,时间平均全息方法首先在1965年由Powell提出。
可以测量和分析物体的微幅振动。
对于在某一稳定频率下作简谐振动的物体,用连续激光照射,并在比振动周期长得多的时间内在全息干版上曝光,可将物体表面所反射的光与未作位相调制的参考光相叠加,将两束光的干涉图记录在全息干版上。
其再现像由反映节线和等振幅线组成的干涉条纹来表示振幅分布。
这就是时间平均全息方法的测振原理。
其时间平均全息图的重现像的光强度按零阶贝塞尔函数的平方分布。
)(20KJI=(175)式中,J0为零阶贝塞尔函数,)cos)(cos,(221+=yxV,其中V(x,y)为物体上某点的位移,1为振动方向和照明方向的夹角,2为振动方向和观察方向的夹角。
如图173所示。
对于作简谐振动的物体,由于振动方向已知,所以在实验光路中将入射光和接收光往图172激光干涉原理SOHE1E2PDFcreatedwithpdfFactoryProtrialversion472往设置成1=2=0,则(75)式变为),(4(20yxVKJI=(176)当V(x,y)=0,I=Imax时,对应的是亮条纹。
在该条纹的位置上是物体振动的节点。
当V(x,y)=0.19,0.43,0.68.,I=0时;也就是干涉暗条纹。
在该条纹的位置上是物体振动的最大振幅。
干涉图中其余点处的振幅值也可按照(176)式所示的规律相应地确定下来。
在传统的全息方法中,将振动信息记录在全息干板上,进而做分析和处理。
从式(175)式和(176)式可知:
当=0时,I值取极大值,即振幅为零的地方光强最亮,也就是振动节线处最亮。
随着振幅变大,光强衰减开始很快,后来变得缓慢,同时,条纹的对比度也变差。
时间平均法的实验过程简单,节线清晰,因此在振动分析中广泛使用。
图173激光全息测振图174第一类零阶贝塞尔函数的平方分布(a)ModeI(b)ModeII(c)ModeI+ModeII图175圆板的振动模态V(x,y)全息干板2激光束物体1PDFcreatedwithpdfFactoryProtrialversion473本节中介绍的两个应用实例如下,图175表示的是周边固支圆板I型、II型和III混合型振型。
其中的亮条纹为节线位置。
图176所示的是吉它的振型。
为了克服时间平均全息法的缺点,激光全息频闪方法采用与振动物体频率同步的激光频闪照明方法,在全息记录过程中,只记录物体的两个状态(振幅的极大值和极小值)。
再现时,使这两个状态干涉产生相对位移分布,获得按余弦平方分布的等振幅线干涉条纹。
该干涉条纹不随振幅增加而衰减,缺点是振动节线不明显。
该方法对非正弦振动也可以进行测量。
随着激光技术的飞速发展,多脉冲激光器发出的脉冲激光的光脉冲时间极短,约为几十纳秒,可以用来做全息振动测量的光源。
图176吉它的振动模态图177用时间平均法ESPI测量传统乐器Veena振动的图像PDFcreatedwithpdfFactoryProtrialversion474电子散斑干涉技术(ESPI-electronicspecklepatterninterferometry)测振在图像记录和自动化处理方面具有明显的优势。
ESPI测量振动时采用的最方便的方法也是时间平均法,但时间平均法得到的由第一类零阶贝塞尔函数表征的散斑干涉条纹,由于贝塞尔函数随自变量的增加迅速衰减的特征和散斑噪音的存在,振动条纹的质量明显低于静态变形的余弦条纹。
数字散斑(DSPI)测振仪存在抗干扰能力差,测量质量不高,难以小型化,难以用于复杂工作环境等缺点。
图177所示的是用时间平均法ESPI测量传统乐器Veena振动的图像。
17.4激光多普勒效应当波源向着接收器移动时,波源和接收器之间传递的波将发生变化,波长缩短,频率升高;反之,当波源背着接收器移动时,波源和接收器之间传递的波的波长将变长,频率会降低;这一现象是奥地利的物理学家J.C.Doppler于1842年首先发现的,称为多普勒效应。
发生多普勒效应的波可以是声波,也可以是电磁波。
利用激光多普勒效应,不仅能测量固体的振动速度,而且也能测量流体(液体和气体)的流动速度。
17.4.1激光多普勒测振原理如图178所示,S为光源,光的频率为f,光速为c。
O为光波接收器件(如雪崩式光电二极管),P为速度为V的运动物体,且能反射光波;当波源和接收器保持相对静止时,假设n是沿从光源到接收者光路上的波数或周期数,由图178可知,在无限小的时间间隔t中,假定P移动到P的距离为Vt。
在光程中周期数将减少为+=NPPNn(177)其中PN和PN分别是向SP和PO作的垂线,PP为无限小,和是散射前后的波长。
(177)可表示为+=21coscostVtVn(178)由于cff=,并且dtdnfffD=(179)则cfVcVffD21coscos+=(1710)在一般情况下,不需要区分和,这样就得到一级近似的多普勒频移)cos(cos21+=cVffD(1711)PDFcreatedwithpdfFactoryProtrialversion475接收器接收到的光波频率为f+fD。
频率偏移量为fD,也称多普勒频率,通常又可写成2cos2cos22121+=cVffD(1712)对于光波沿反向散射时,即光源和光波接收器件为一体时(如图179所示),S=O,1=-2。
因此:
cos2cos2VcVffD=(1713)为激光波长,当=0时,VcVffD22=(1714)由此可知,激光多普勒测振原理就是基于测量从物体表面微小区域反射回的相干激光光波的多普勒频率fD,进而确定该测点的振动速度V。
17.4.2激光三维测振原理工程中的许多结构和部件的振动是三维的。
即物体表面某一点的振动(速度)可被分解成两个面内分量(Vx,Vy)和一个离面分量Vz。
当进行三维激光振动测量时,需要使用三束激光照射被测点。
如图1710所示。
在光路布置中,光束ZZ沿Z轴方向,用于测量Vz,从而可得sincosxzzxVVV+=(1715)sincosyzzyVVV+=(1716)由(1715)式、(1716)式解得速度分量为sincoszzxxVVV=(1717)图178散射多普勒频移图179激光多普勒(Doppler)效应NSff+fDP12NSfVf+fDP1=2VOPPDFcreatedwithpdfFactoryProtrialversion476sincoszzyyVVV=(1718)由多普勒频移测量速度的最直接的方法是利用高分辨率的光谱仪分析来自振动物体的散射光。
由于物体实际的振动速度比光速小得多,例如,当波长为632810-10米/秒、振动物体的速度为10米/秒时,可获得He-Ne激光的多普勒频移的最大值,按(1714)计算,可得MHz6.31=Df,而激光本身的频率f很高(约为4.741014Hz),即fD/f=6.6710-8。
因此,直接测量多普勒频率fD是不可能的。
而是当多普勒频移足够大时,可以借助于高分辨率的法布里-珀罗干涉仪(Fabry-Perot)进行测量。
在一般情况下,大多数物体的振动速度所引起的多普勒频移在几十千赫几十兆赫,超出了光谱仪的分辨率。
这时需要借助于光学差拍及参考光技术来测量。
17.5激光多普勒光学信息处理将物体表面的反射光(频率为f+fD)。
和参考光(频率为f)相混合(相干),利用光探测器件接收相干光强,其拍频率等于fD。
常用的光学干涉装置为迈克尔逊(Michelson)干涉仪,如图1711所示。
激光束经过分光镜BS后被分成测量光束和参考光束,分光镜BS与参考平晶M和物体O的距离分别记为XR和XM。
相对应的光学位相分别为R=2kXR,M=2kXM。
式中k=2/.。
(t)=R-M。
参照17.2中的分析,光探测器接收到的是与时间相干的光强信息。
)2cos
(2)(+=tfRIIKRIItIDMRMR(1719)图1710激光三维测振X-axisY-axis光束ZX光束ZY光束ZZVZ-axisPDFcreatedwithpdfFactoryProtrialversion477IR和IM分别为参考光束和测量光束的光强,K为合成有效系数,R为表面反射系数。
=4L/,L为物体的振动位移,如果L连续变化,光强I(t)则呈周期性。
L每变化/2,则相应地改变2。
的变化率正比于物体表面的振动速度。
(1719)式中包含了一个正比于总光强的直流项和一个正比于振幅A1A2或MRII的差拍频率。
由于接收器得到的信号具有正弦(余弦)特征,并不
 升级会员
升级会员 