ABB机器人RAPID程序指令与功能简述.docx
《ABB机器人RAPID程序指令与功能简述.docx》由会员分享,可在线阅读,更多相关《ABB机器人RAPID程序指令与功能简述.docx(18页珍藏版)》请在冰豆网上搜索。
ABB机器人RAPID程序指令与功能简述
5.6RAPID程序指令与功能简述
5.6.1程序执行的控制
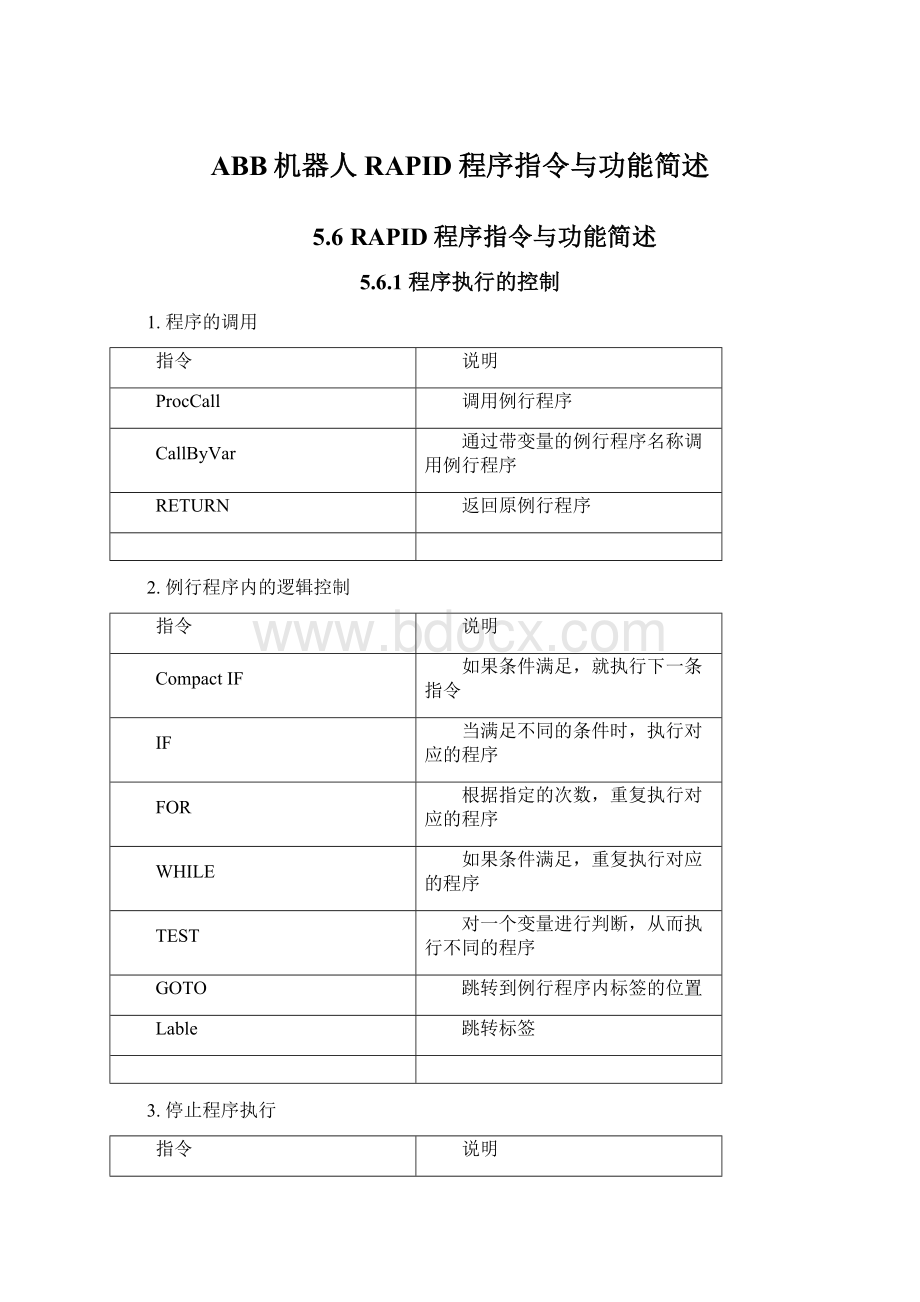
1.程序的调用
指令
说明
ProcCall
调用例行程序
CallByVar
通过带变量的例行程序名称调用例行程序
RETURN
返回原例行程序
2.例行程序内的逻辑控制
指令
说明
CompactIF
如果条件满足,就执行下一条指令
IF
当满足不同的条件时,执行对应的程序
FOR
根据指定的次数,重复执行对应的程序
WHILE
如果条件满足,重复执行对应的程序
TEST
对一个变量进行判断,从而执行不同的程序
GOTO
跳转到例行程序内标签的位置
Lable
跳转标签
3.停止程序执行
指令
说明
Stop
停止程序执行
EXIT
停止程序执行并禁止在停止处再开始
Break
临时停止程序的执行,用于手动调试
SystemStopAction
停止程序执行与机器人运动
ExitCycle
中止当前程序的运行并将程序指针PP复位到主程序的第一条指令。
如果选择了程序连续运行模式,程序将从主程序的第一句重新执行。
5.6.2变量指令
1.赋值指令
指令
说
明
:
=
对程序数据进行赋值
2.等待指令
指令
说明
WaitTime
等待一个指定的时间,程序再往下执行
WaitUntil
等待一个条件满足后,程序继续往下执行
指令
说
明
WaitDI
等待一个输入信号状态为设定值
WaitDO
等待一个输出信号状态为设定值
3.程序注释
指令
说
明
Comment
对程序进行注释
4.程序模块加载
指令
说明
Load
从机器人硬盘加载一个程序模块到运行内存
UnLoad
从运行内存中卸载一个程序模块
StartLoad
在程序执行的过程中,加载一个程序模块到运行内存中
WaitLoad
当StartLoad使用后,使用此指令将程序模块连接到任务中使用
CancelLoad
取消加载程序模块
CheckProgRef
检查程序引用
Save
保存程序模块
EraseModule
从运行内存删除程序模块
5.变量功能
指令
说
明
TryInt
判断数据是否是有效的整数
功能
说明
OpMode
读取当前机器人的操作模式
RunMode
读取当前机器人程序的运行模式
NonMotionMode
读取程序任务当前是否无运动的执行模式
Dim
获取一个数组的维数
Present
读取带参数例行程序的可选参数值
IsPers
判断一个参数是不是可变量
IsVar
判断一个参数是不是变量
6.转换功能
指令
说明
StrToByte
将字符串转换为指定格式的字节数据
ByteToStr
将字节数据转换为字符串
5.6.3运动设定
1.速度设定
功能
说
明
MaxRobSpeed
获取当前型号机器人可实现的最大
TCP速度
指令
说明
VelSet
设定最大的速度与倍率
SpeedRefresh
更新当前运动的速度倍率
AccSet
定义机器人的加速度
WorldAccLim
设定大地坐标中工具与载荷的加速度
PathAccLim
设定运动路径中TCP的加速度
2.轴配置管理
指令
说明
ConfJ
关节运动的轴配置控制
ConfL
线性运动的轴配置控制
3.奇异点的管理
指令
说明
SingArea
设定机器人运动时,在奇异点的插补方式
4.位置偏置功能
指令
说明
PDispOn
激活位置偏置
PDispSet
激活指定数值的位置偏置
PDispOff
关闭位置偏置
EOffsOn
激活外轴偏置
EOffsSet
激活指定数值的外轴偏置
EOffsOff
关闭外轴位置偏置
功能
说明
DefDFrame
通过三个位置数据计算出位置的偏置
DefFrame
通过六个位置数据计算出位置的偏置
ORobT
从一个位置数据删除位置偏置
DefAccFrame
从原始位置和替换位置定义一个框架
5.软伺服功能
指令
说
明
SoftAct
激活一个或多个轴的软伺服功能
SoftDeact
关闭软伺服功能
6.机器人参数调整功能
指令
说明
TuneServo
伺服调整
TuneReset
伺服调整复位
PathResol
几何路径精度调整
CirPathMode
在圆弧插补运动时,工具姿态的变换方式
7.空间监控管理
指令
说明
WZBoxDef
定义一个方形的监控空间
WZCylDef
定义一个圆柱形的监控空间
WZSphDef
定义一个球形的监控空间
WZHomeJointDef
定义一个关节轴坐标的监控空间
WZLimJointDef
定义一个限定为不可进入的关节轴坐标监控空间
WZLimSup
激活一个监控空间并限定为不可进入
WZDOSet
激活一个监控空间并与一个输出信号关联
WZEnable
激活一个临时的监控空间
WZFree
关闭一个临时的监控空间
注:
这些功能需要选项“Worldzones”配合。
5.6.4运动控制
1.机器人运动控制
指令
说明
MoveC
TCP圆弧运动
MoveJ
关节运动
MoveL
TCP线性运动
MoveAbsJ
轴绝对角度位置运动
MoveExtJ
外部直线轴和旋转轴运动
MoveCDO
TCP圆弧运动的同时触发一个输出信号
MoveJDO
关节运动的同时触发一个输出信号
MoveLDO
TCP线性运动的同时触发一个输出信号
MoveCSync
TCP圆弧运动的同时执行一个例行程序
MoveJSync
关节运动的同时执行一个例行程序
MoveLSync
TCP线性运动的同时执行一个例行程序
2.搜索功能
指令
说明
SearchC
TCP圆弧搜索运动
SearchL
TCP线性搜索运动
SearchExtJ
外轴搜索运动
3.指定位置触发信号与中断功能
指令
说明
TriggIO
定义触发条件在一个指定的位置触发输出信号
TriggInt
定义触发条件在一个指定的位置触发中断程序
TriggCheckIO
定义一个指定的位置进行I/O状态的检查
TriggEquip
定义触发条件在一个指定的位置触发输出信号,并对信号响应的延迟进行补偿设定
指令
说明
TriggRampAO
定义触发条件在一个指定的位置触发模拟输出信号,并对信号响应的延迟进行补偿设定
TriggC
带触发事件的圆弧运动
TriggJ
带触发事件的关节运动
TriggL
带触发事件的直线运动
TriggLIOs
在一个指定的位置触发输出信号的线性运动
StepBwdPath
在RESTART的事件程序中进行路径的返回
TriggStopProc
在系统中创建一个监控处理,用于在STOP和QSTOP中需要信号复
位和程序数据复位的操作
TriggSpeed
定义模拟输出信号与实际TCP速度之间的配合
4.出错或中断时的运动控制
指令
说明
StopMove
停止机器人运动
StartMove
重新启动机器人运动
StartMoveRetry
重新启动机器人运动及相关的参数设定
StopMoveReset
对停止运动状态复位,但不重新启动机器人运动
StorePath*
存储已生成的最近路径
RestoPath*
重新生成之前存储的路径
ClearPath
在当前的运动路径级别中,清空整个运动路径
PathLevel
获取当前路径级别
SyncMoveSuspend*
在StorePath的路径级别中暂停同步坐标的运动
SyncMoveResume*
在StorePath的路径级别中返回同步坐标的运动
*:
这些功能需要选项“Pathrecovery”配合。
5.外轴的控制
指令
说
明
DeactUnit
关闭一个外轴单元
ActUnit
激活一个外轴单元
MechUnitLoad
定义外轴单元的有效载荷
功能
说明
GetNextMechUnit
检索外轴单元在机器人系统中的名字
IsMechUnitActive
检查一个外轴单元状态是关闭/激活
6.独立轴控制
指令
说明
IndAMove
将一个轴设定为独立轴模式并进行绝对位置方式运动
IndCMove
将一个轴设定为独立轴模式并进行连续方式运动
IndDMove
将一个轴设定为独立轴模式并进行角度方式运动
IndRMove
将一个轴设定为独立轴模式并进行相对位置方式运动
IndReset
取消独立轴模式
功能
说明
IndInpos
检查独立轴是否已到达指定位置
IndSpeed
检查独立轴是否已到达指定的速度
注:
这些功能需要选项“Independentmovement”配合。
7.路径修正功能
指令
说
明
CorrCon
连接一个路径修正生成器
CorrWrite
将路径坐标系统中的修正值写到修正生成器
CorrDiscon
断开一个已连接的路径修正生成器
CorrClear
取消所有已连接的路径修正生成器
注:
这些功能需要选项“PathoffsetorRobotWare-Arcsensor”配合。
功能
说明
CorrRead
读取所有已连接的路径修正生成器的总修正值
注:
这些功能需要选项“PathoffsetorRobotWare-Arcsensor”配合。
8.路径记录功能
指令
说明
PathRecStart
开始记录机器人的路径
PathRecStop
停止记录机器人的路径
PathRecMoveBwd
机器人根据记录的路径作后退动作
PathRecMoveFwd
机器人运动到执行PathRecMoveBwd这个指令的位置上
注:
这些功能需要选项“Pathrecovery”配合。
功能
说明
PathRecValidBwd
检查是否已激活路径记录和是否有可后退的路径
PathRecValidFwd
检查是否有可向前的记录路径
注:
这些功能需要选项“Pathrecovery”配合。
9.输送链跟踪功能
指令
说明
WaitWObj
等待输送链上的工件坐标
DropWObj
放弃输送链上的工件坐标
注:
这些功能需要选项“Conveyortracking”配合。
10.传感器同步功能
指令
说明
WaitSensor
将一个在开始窗口的对象与传感器设备关联起来
SyncToSensor
开始/停止机器人与传感器设备的运动同步
DropSensor
断开当前对象的连接
注:
这些功能需要选项“Sensorsynchronization”配合。
11.有效载荷与碰撞检测
指令
说明
MotionSup*
激活/关闭运动监控
LoadId
工具或有效载荷的识别
 升级会员
升级会员 