哈工大机械原理大作业凸轮机构.docx
《哈工大机械原理大作业凸轮机构.docx》由会员分享,可在线阅读,更多相关《哈工大机械原理大作业凸轮机构.docx(13页珍藏版)》请在冰豆网上搜索。
哈工大机械原理大作业凸轮机构
大作业2凸轮机构设计
一、设计题目
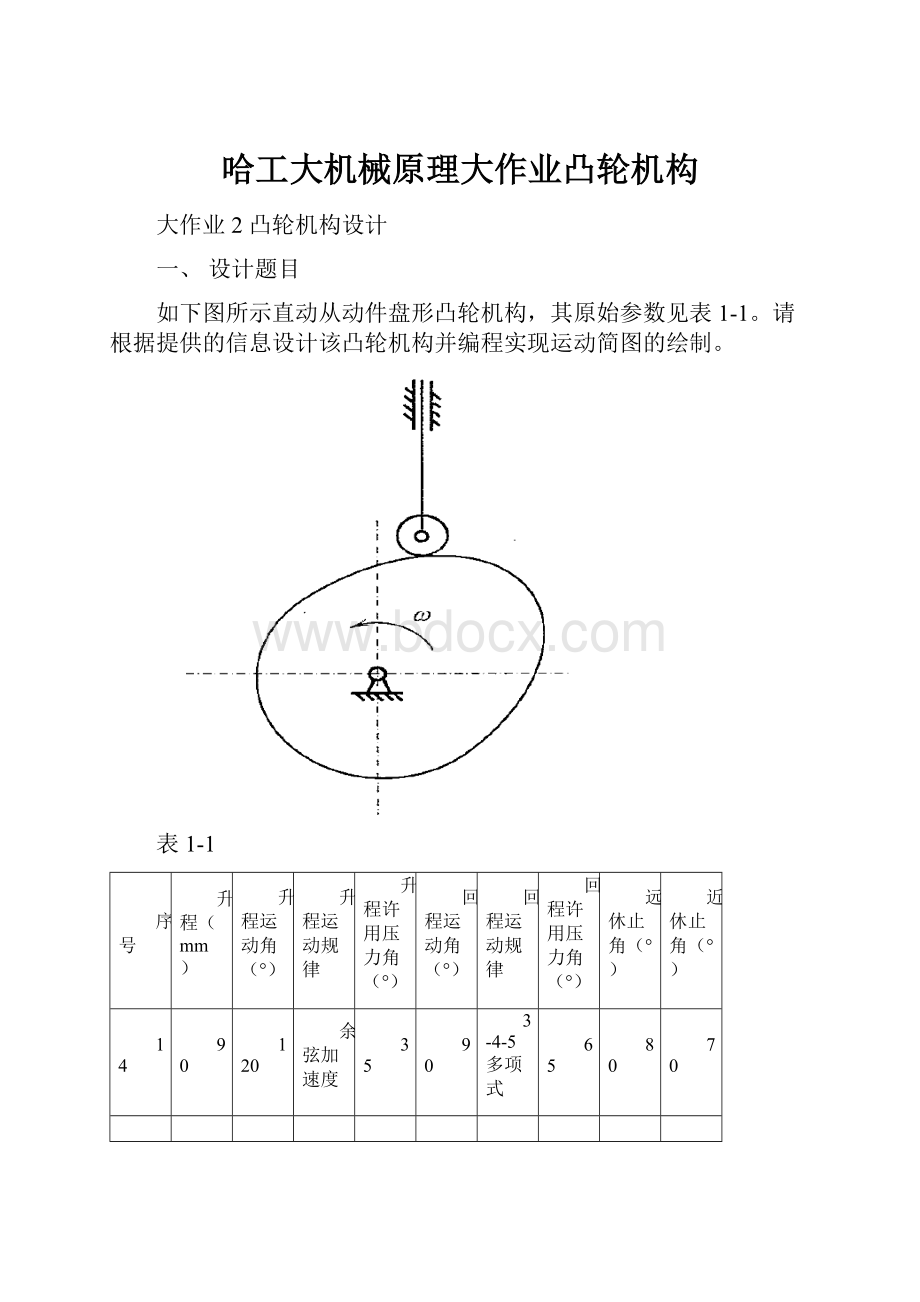
如下图所示直动从动件盘形凸轮机构,其原始参数见表1-1。
请根据提供的信息设计该凸轮机构并编程实现运动简图的绘制。
表1-1
序号
升程(mm)
升程运动角(°)
升程运动规律
升程许用压力角(°)
回程运动角(°)
回程运动规律
回程许用压力角(°)
远休止角(°)
近休止角(°)
14
90
120
余弦加速度
35
90
3-4-5多项式
65
80
70
二、凸轮机构运动方程
(凸轮推杆推程、回程运动方程,绘制推杆位移、速度和加速度线图)
不妨设凸轮运动角速度为w=
rad/s
1、推程、回程运动方程
推程(
)
由题知推程运动角φ0=
,从动件最大位移h=90mm,又设定凸轮角速度为w=
rad/s,带入公式:
s=
v=
a=
可以得到
s=
v=
a=
回程(
)
将φ0=
,h=90mm,w=
rad/s,φ0′=
φs=
带入公式:
s=h
v=-
a=-
(其中T=
)
可以得到
s=90
v=-
a=-
2、推杆位移、速度、加速度线图
位移线图
Matlab源程序:
x1=0:
0.001:
(pi*2/3);
s1=45*(1-cos(x1*3/2));
x2=(pi*2/3):
0.001:
(pi*10/9);
s2=90;
x3=(pi*10/9):
0.001:
(pi*29/18);
T1=(x3-10*pi/9)/(pi/2);
s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5));
x4=(pi*29/18):
0.001:
(pi*2);
s4=0;
plot(x1,s1,x2,s2,x3,s3,x4,s4);
title('推杆位移');
xlabel('ψ/rad'),ylabel('S/mm');
速度线图
Matlab源程序:
x1=0:
0.001:
(pi*2/3);
v1=135/8*sin(x1*3/2);
x2=(pi*2/3):
0.001:
(pi*10/9);
v2=0;
x3=(pi*10/9):
0.001:
(pi*29/18);
T1=(x3-10*pi/9)/(pi/2);
v3=(1350*T1.^2).*(1-2*T1+T1.^2);
x4=(pi*29/18):
0.001:
(pi*2);
v4=0;
plot(x1,v1,x2,v2,x3,v3,x4,v4);
title('推杆速度');
xlabel('ψ/rad'),ylabel('v/(mm/s^2)');
加速度线图
Matlab源程序:
x1=0:
0.001:
(pi*2/3);
a1=405*pi.^2/64*cos(x1*3/2);
x2=(pi*2/3):
0.001:
(pi*10/9);
a2=0;
x3=(pi*10/9):
0.001:
(pi*29/18);
T1=(x3-10*pi/9)/(pi/2);
a3=-675*pi*T1.*(1-3*T1+2*T1.^2);
x4=(pi*29/18):
0.001:
(pi*2);
a4=0;
plot(x1,a1,x2,a2,x3,a3,x4,a4);
title('推杆加速度');
xlabel('ψ/rad'),ylabel('a/(mm/s^2)');
二、凸轮机构的
—s线图
Matlab源程序:
m1=0:
0.001:
(pi*2/3);
r1=135/2*sin(3*m1/2);
s1=45-45*cos(3*m1/2);
m2=(pi*2/3):
0.001:
(pi*10/9);
r2=0;
s2=0;
m3=(pi*10/9):
0.001:
(pi*29/18);
T1=(m3-10*pi/9)/(pi/2);
r3=-(21600*((10*pi)/9-m3).^2)/pi^3-(86400*((10*pi)/9-m3).^3)/pi^4-(86400*((10*pi)/9-m3).^4)/pi^5;
s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5));
m4=(pi*29/18):
0.001:
(pi*2);
r4=0;
s4=0;
plot(r1,s1,r2,s2,r3,s3,r4,s4);
title('凸轮机构
图');
xlabel('
'),ylabel('s');
三、凸轮机构基圆半径和偏距
先通过matlab编程求出凸轮轴心的许用范围(如下图中三条直线下方的公共区域)
Matlab源程序:
m1=0:
0.001:
(pi*2/3);
r1=135/2*sin(3*m1/2);
s1=45-45*cos(3*m1/2);
m2=(pi*2/3):
0.001:
(pi*10/9);
r2=0;
s2=0;
m3=(pi*10/9):
0.001:
(pi*29/18);
T1=(m3-10*pi/9)/(pi/2);
r3=-(21600*((10*pi)/9-m3).^2)/pi^3-(86400*((10*pi)/9-m3).^3)/pi^4-(86400*((10*pi)/9-m3).^4)/pi^5;
s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5));
m4=(pi*29/18):
0.001:
(pi*2);
r4=0;
s4=0;
a1=-60:
0.001:
80;
b1=tan(11/36*pi)*a1-62;
a2=-120:
0.001:
80;
b2=tan(31/36*pi)*a2-21.5;
a3=0:
0.001:
80;
b3=tan(25/36*pi)*a3;
plot(r1,s1,r2,s2,r3,s3,r4,s4,a1,b1,a2,b2,a3,b3);
xlabel('
'),ylabel('s');
由图可取基圆半径r0=50mm,偏距e=40mm,s0=30mm。
五、滚子半径、凸轮理论和实际轮廓线
因为滚子半径rr须满足rr=(0.1~0.5)r0,且rr凸轮理论轮廓曲线方程为:
(其中
凸轮实际轮廓曲线方程为:
(其中
(外层的曲线为理论轮廓曲线,内层的的曲线为实际轮廓曲线)
Matlab源程序:
s0=30;
e=40;
Rr=15;
m1=0:
0.0001:
(pi*2/3);
s1=45-45*cos(3*m1/2);
x1=(s0+s1).*cos(m1)-e*sin(m1);
y1=(s0+s1).*sin(m1)+e*cos(m1);
p1=sin(m1).*(45*cos((3*m1)/2)-75)-40*cos(m1)+(135*sin((3*m1)/2).*cos(m1))/2;
q1=(135*sin((3*m1)/2).*sin(m1))/2-cos(m1).*(45*cos((3*m1)/2)-75)-40*sin(m1);
X1=x1-Rr*q1/((p1.^2+q1.^2).^0.5);
Y1=y1+Rr*p1/((p1.^2+q1.^2).^0.5);
m2=(pi*2/3):
0.0001:
(pi*10/9);
x2=(s0+90)*cos(m2)-e*sin(m2);
y2=(s0+90)*sin(m2)+e*cos(m2);
p2=-40*cos(m2)-120*sin(m2);
q2=120*cos(m2)-40*sin(m2);
X2=x2-Rr*q2/((p2.^2+q2.^2).^0.5);
Y2=y2+Rr*p2/((p2.^2+q2.^2).^0.5);
symsm3
T1=(m3-10*pi/9)/(pi/2);
s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5));
x3=(s0+s3).*cos(m3)-e*sin(m3);
y3=(s0+s3).*sin(m3)+e*cos(m3);
p3=diff(x3,m3);
q3=diff(y3,m3);
m3=(pi*10/9):
0.0001:
(pi*29/18);
X3=x3-Rr*q3/((p3.^2+q3.^2).^0.5);
Y3=y3+Rr*p3/((p3.^2+q3.^2).^0.5);
m4=(pi*29/18):
0.0001:
(pi*2);
x4=s0*cos(m4)-e*sin(m4);
y4=s0*sin(m4)+e*cos(m4);
p4=-40*cos(m4)-30*sin(m4);
q4=30*cos(m4)-40*sin(m4);
X4=x4-Rr*q4/((p4.^2+q4.^2).^0.5);
Y4=y4+Rr*p4/((p4.^2+q4.^2).^0.5);
plot(x1,y1,X1,Y1,x2,y2,X2,Y2,subs(x3),subs(y3),subs(X3),subs(Y3),x4,y4,X4,Y4);
 升级会员
升级会员 