自动化专业知识体系.docx
《自动化专业知识体系.docx》由会员分享,可在线阅读,更多相关《自动化专业知识体系.docx(133页珍藏版)》请在冰豆网上搜索。
自动化专业知识体系
附录1:
自动化科学与技术业知识体系
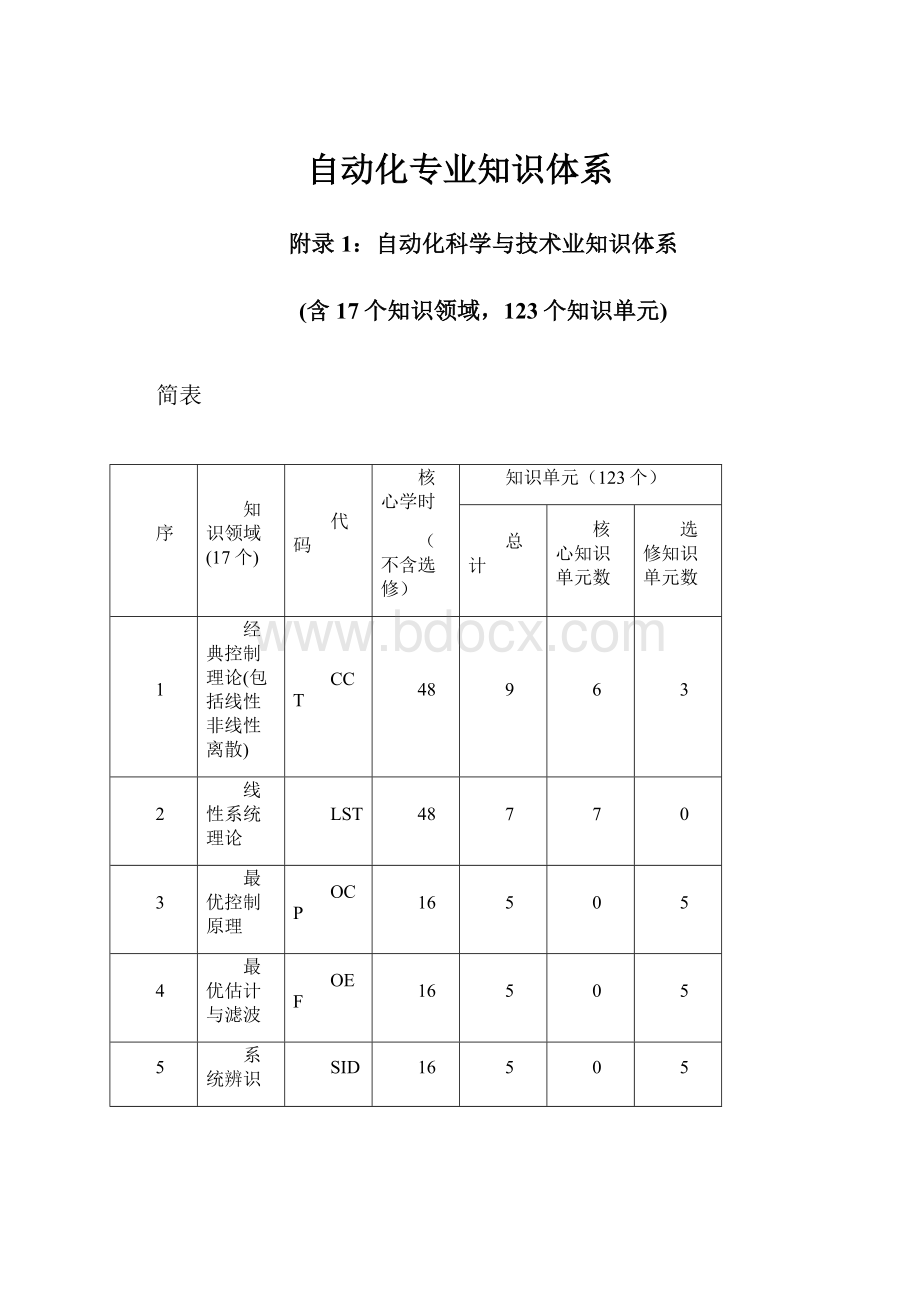
(含17个知识领域,123个知识单元)
简表
序
知识领域(17个)
代码
核心学时
(不含选修)
知识单元(123个)
总计
核心知识单元数
选修知识单元数
1
经典控制理论(包括线性非线性离散)
CCT
48
9
6
3
2
线性系统理论
LST
48
7
7
0
3
最优控制原理
OCP
16
5
0
5
4
最优估计与滤波
OEF
16
5
0
5
5
系统辨识
SID
16
5
0
5
6
计算机硬件技术
CHW
48
10
7
3
7
程序设计与语言
PAL
48
5
4
1
8
计算机网络与通讯
CNC
48
7
0
7
9
计算机控制技术
CCT
48
9
7
2
10
控制系统数字仿真
CSS
22
7
7
0
11
信息获取与处理
SMP
32
6
5
1
12
电机原理
EMP
48
4
4
0
13
电力拖动原理
MDP
48
4
4
0
14
电力电子技术
PET
48
8
7
1
15
运动(电机)控制
MCT
48
8
5
3
16
自动化仪表
AUI
32
7
7
0
17
过程控制
PCS
40
6
5
1
1.经典控制理论CCT
CCT1控制系统的基本概念(核心)
CCT2控制系统的数学模型(核心)
CCT3时域分析法(核心)
CCT4根轨迹法(核心)
CCT5频率响应法(核心)
CCT6系统校正的设计方法(核心)
CCT7采样系统分析(选修)
CCT8非线性控制系统分析(选修)
CCT9利用Matlab进行时域和频域分析(选修)
2.线性系统理论LST
LST1线性系统的数学描述(核心)
LST2线性系统的运动分析(核心)
LST3稳定性(核心)
LST4能控性与能观测性(核心)
LST5最小实现(核心)
LST6反馈控制(核心)
LST7状态观测器(核心)
3.最优控制原理OPC(选修)
OCP1最优控制的一般表示
OCP2极小值原理
OCP3时间与燃料最优控制
OCP4二次型指标最优控制
OCP5动态规划
4.最优估计与滤波EAF(选修)
OEF1估计问题概述
OEF2估计的一般方法
OEF3离散卡尔曼滤波
OEF4连续卡尔曼滤波
OEF5非线性滤波
5.系统辨识SID(选修)
SID1系统辨识问题
SID2最小二乘理论
SID3权函数辨识
SID4线性模型参数辨识
SID5系统辨识发展及其它:
神经网络辨识、模糊辨识、辨识模型验证等
6.计算机硬件技术CHW
CHW1数字计算机组成基本概述(核心)
CHW2定点数/浮点数编码与运算(核心)
CHW3存储器系统(核心)
CHW4指令系统(核心)
CHW5指令流水(核心)
CHW6总线技术(核心)
CHW7输入/输出系统(核心)
CHW8数字信号处理器(DSP)(选修)
CHW9可编程逻辑器件(FPGA)(选修)
CHW10嵌入式系统(选修)
7.程序设计基础(软件)PGB
PGB1程序设计语言概论(核心)
PGB2程序设计导论(核心)
PGB3面向对象程序设计(核心)
PGB4数据结构与算法(核心)
PGB5数据库基础与应用(选修)
8.计算机网络与通讯CNC(选修)
CNC1网络的层次体系结构;
CNC2数据通信基础——物理层
CNC3局域网的介质访问子层
CNC4数据链路层
CNC5网络层
CNC6传输层
CNC7应用层
9.计算机控制技术CCT
CCT1计算机控制系统概述(核心)
CCT2通道与接口技术(核心)
CCT3数据采集及处理(核心)
CCT4线性离散系统的数学描述与分析(核心)
CCT5数字控制器的间接设计(核心)
CCT6数字控制器的直接设计(核心)
CCT7计算机控制系统的可靠性(选修)
CCT8计算机控制系统的工程实现(选修)
CCT9可编程控制器(PLC)
10.控制系统数字仿真CSS
CSS1仿真软件—MATLAB(核心)
CSS2控制系统的数学模型及其转换(核心)
CSS3采样控制系统的数字仿真(核心)
CSS4动态仿真集成环境-SIMULINK(核心)
CSS5基于MATLAB工具箱的控制系统分析与设计(核心)
11.信息获取与处理SMP
SMP1信息获取与处理的基本概念(核心)
SMP2测量不确定度与回归分析(核心)
SMP3检测系统的静、动态特性(核心)
SMP4检测变换原理与传感器(核心)
SMP5参数检测(选修)
SMP6自动检测系统设计初步(核心)
12.电机原理EMP
EMP1直流电机(核心)
EMP2变压器(核心)
EMP3异步电动机(核心)
EMP4同步电机(核心)
13.电力拖动原理MDP
MDP1电力拖动动力学基础(核心)
MDP2直流电机的电力拖动(核心)
MDP3交流电动机的电力拖动(核心)
MDP4电动机容量的选择(核心)
14.电力电子技术PET
PET0绪论(核心)
PET1电力电子器件(核心)
PET2整流电路(核心)
PET3直流斩波电路(核心)
PET4交流电力控制电路(核心)
PET5逆变电路(核心)
PET6PWM控制技术(核心)
PET7软开关技术(核心)
PET8组合变流电路(选修)
15.运动(电机)控制技术MCT
MCT1闭环控制的直流调速系统(核心)
MCT2双闭环直流调速系统(核心)
MCT3变压变频调速系统(核心)
MCT4矢量控制的变频调速系统(核心)
MCT5直接转矩控制系统(核心)
MCT6串级调速系统(选修)
MCT7同步电动机的变频调速系统(选修)
MCT8运动控制系统的计算机辅助设计(选修)
16.自动化仪表AUI
AUI1自动化仪表的基本概念(核心)
AUI2变送单元(核心)
AUI3控制单元(核心)
AUI4执行单元(核心)
AUI5显示记录单元(核心)
AUI6安全栅及辅助单元(核心)
AUI7虚拟仪器与现场总线仪表(核心)
17.过程控制PCS
PCS1过程建模与过程特性(核心)
PCS2简单控制系统(核心)
PCS3复杂控制系统(核心)
PCS4先进控制技术(核心)
PCS5典型设备与工业过程控制(核心)
PCS6过程计算机控制系统(选修)
知识领域描述
经典控制理论(CCT)
经典控制理论(CCT)(核心内容学时数:
48)
备注
内容简介
经典控制理论是线性系统理论、最优控制原理等后续课程的基础,为控制系统提供了数学模型的建立、性能分析和系统设计的基本方法。
包括单变量线性定常连续系统的微分方程、传递函数、方块图和信号流图等数学模型的建立;系统稳定性、动态性能、稳态性能的时域分析;频率响应法和根轨迹法;系统串联校正的设计方法;以及采样系统的稳定性分析和校正的基本方法;简单非线性控制系统分析的描述函数法及相平面法。
知识单元
CCT1控制系统的基本概念(核心)
CCT2控制系统的数学模型(核心)
CCT3时域分析法(核心)
CCT4根轨迹法(核心)
CCT5频率响应法(核心)
CCT6系统校正的设计方法(核心)
CCT7采样系统(选修)
CCT8非线性控制系统(选修)
CCT9利用Matlab进行时域和频域分析(选修)
知识单元描述
CCT1
控制系统的基本概念
(核心)
参考
课时
2
知识
点
●自动控制系统的定义、构成;
●自动控制系统的基本控制方式:
开环控制、闭环控制、复合控制;
●自动控制系统的分类:
恒值与随动系统、线性与非线性系统、定常与时变系统、连续与离散系统;
●对控制系统的基本要求;
●自动控制原理研究的内容。
学习
目标
1.掌握控制系统的组成和基本结构,熟悉各组成部分在控制系统中的作用;
2.掌握开环控制与闭环控制的基本特点;
3.通过用不同的方法对控制系统进行分类,了解各种类型的控制系统的特点;
4.明确本门课程的目的以及对控制系统的评价指标。
CCT2控制系统的数学模型(核心)
参考
课时
8
知识
点
●微分方程:
机械系统、电路系统(有源、无源)、机电系统微分方程的建立;
●传递函数:
传递函数的定义、性质及典型环节的传递函数;
●方块图:
方块图的组成、建立及简化;
●信号流图:
信号流图的组成、建立及梅森增益公式;
●闭环系统的传递函数:
输入量及扰动量作用下的传递函数、误差传递函数。
学习
目标
1.掌握建立控制系统微分方程的方法;
2.掌握传递函数的定义、性质和求取方法;
3.掌握用方块图简化建立系统传递函数的方法;
4.掌握梅森增益公式及其应用。
CCT3时域分析法(核心)
参考
课时
12
知识
点
●典型一阶系统动态性能:
数学模型和单位阶跃响应;
●典型二阶系统的动态性能:
典型二阶系统的数学模型、阶跃响应(欠阻尼和过阻尼)、二阶系统的动态性能指标、二阶系统性能的改善(包括比例——微分控制;速度反馈控制;两者的比较);
●高阶系统的时域分析:
高阶系统的动态响应、闭环主导极点;
●控制系统的稳定性分析:
渐近稳定性定义(结合物理系统给出定义)、稳定的充分必要条件、代数稳定判据;
●控制系统的稳态性能分析:
误差的定义(包括两种不同的定义方法:
从输入端和输出端定义)、稳态误差的定义、系统类型、稳态误差分析与静态误差系数、减小或消除稳态误差的措施(包括PI控制和复合控制)、动态误差系数;
●利用Matlab进行时域分析(选修);
学习
目标
1.掌握一阶和二阶系统的数学模型及单位阶跃响应的形式;
2.掌握二阶系统欠阻尼情况下的性能指标以及改善二阶系统性能的方法(包括比例微分控制、速度反馈控制);
3.掌握高阶系统的闭环主导极点概念及高阶系统性能的分析方法;
4.掌握分析系统渐近稳定性的方法;
5.掌握分析系统稳态性能的方法及改善系统稳态性能的措施;
6.掌握利用Matlab对系统进行时域分析的方法;
CCT4根轨迹法(核心)
参考
课时
7
知识
点
●根轨迹方程:
幅值条件和辐角条件;
●根轨迹作图的一般规则、典型的零、极点分布及其相应的根轨迹;
●参量根轨迹;
●系统性能分析:
稳定性分析、增加零、极点对根轨迹的影响(包括PID控制的影响)、利用主导极点估计系统的性能指标;
●利用Matlab绘制根轨迹图;
学习
目标
1.掌握用手工绘制简略的常规和参量根轨迹以及用Matlab绘制精确根轨迹的方法;
2.掌握利用根轨迹分析系统稳定性、瞬态性能和稳态性能的方法。
CCT5频域分析法
(核心)
参考
课时
13
知识
点
●频率特性的定义;
●对数坐标图:
对数坐标图的特点、典型环节的Bode图、绘制Bode图的一般步骤、非最小相位系统的Bode图;
●极坐标图:
典型环节的极坐标图、系统的极坐标图、非最小相位系统的极坐标图;
●奈奎斯特稳定判据:
辐角原理、奈奎斯特稳定判据、奈奎斯特稳定判据在开环系统含有积分环节时的应用、奈奎斯特判据在Bode图中的应用;
●稳定裕量:
幅值裕量及相位裕量;
●闭环特性:
等M和等N园;
●利用Matlab进行频域分析。
学习
目标
1.掌握频率特性的基本概念;
2.掌握用手工绘制简略Bode图和极坐标以及用Matlab绘制精确的Bode图和极坐标图的方法;
3.掌握利用奈奎斯特稳定判据在Bode图和极坐标图分析系统稳定性的方法;
4.掌握稳定裕量的概念;
5.了解利用等M和等N园分析系统闭环性能的方法。
CCT6系统校正的设计方法(核心)
参考
课时
6
知识
点
●校正装置:
超前、滞后、滞后超前网络的特性;
●系统校正的根轨迹法:
超前、滞后、滞后超前校正设计;
●系统校正的频率响应法:
超前、滞后、滞后超前校正设计;
●PID控制器:
控制法则及对系统性能的影响。
学习
目标
1.掌握超前、滞后、滞后超前网络的基本特性。
2.掌握利用根轨迹设计超前、滞后、滞后超前网络的方法。
3.掌握利用Bode图设计超前、滞后、滞后超前网络的方法。
4.掌握PID控制器对系统性能的影响。
CCT7离散控制系统分析(选修)
参考
课时
(8)
知识
点
●信号采样和保持;
●采样系统数学模型:
差分方程和脉冲传递函数;
●采样系统稳定性:
s平面和z平面的映射关系、稳定性判据、劳斯稳定判据;
●采样系统稳态误差及动态性能分析;
●采样系统的校正:
数字控制器的脉冲传递函数、最小拍系统设计。
学习
目标
1.了解信号采样和保持的基本原理。
2.能建立采样系统的脉冲传递函数。
3.掌握采样系统稳定性、稳态误差及动态性能分析方法。
4.掌握采样系统的最小拍系统设计方法。
CCT8非线性控制系统分析(选修)
参考
课时
(8)
知识
点
●非线性控制系统的特点及研究方法;
●常见的典型非线性特性;
●相平面法基础:
相轨迹作图方法、由相平面图求时间解;
●相平面法分析:
具有分段线性系统和继电器型系统的分析、速度反馈对非线性控制系统性能的影响;
●描述函数法:
描述函数的建立、自激振荡的确定;
学习
目标
1.了解非线性控制系统的特点、研究方法及常见的典型非线性特性。
2.能用相平面法分析系统性能。
3.掌握利用描述函数分析系统性能的方法。
线性系统理论(LST)
2.线性系统理论(LST)(核心内容学时数:
48)
备注
内容简介
线性系统理论是现代控制理论的基础内容,为控制系统提供有效的数学描述、特性分析和系统设计的基本方法。
自动化科学与技术的许多领域都要用到线性系统理论中的概念、理论和方法,包括状态空间、状态方程、稳定性、能控性、能观测性、最小实现、反馈控制及观测器等重要内容。
线性系统理论中的基本概念、方法和理论,广泛应用于现代控制理论的各个分支领域,是学习和研究现代控制理论的基础。
知识单元
LST1线性系统的数学描述(核心)
LST2线性系统的运动分析(核心)
LST3稳定性(核心)
LST4能控性与能观测性(核心)
LST5最小实现(选修)
LST6反馈控制(核心)
LST7状态观测器(核心)
知识单元描述
LST1
系统
数学
描述
(核
心)
参考
课时
6
知识
点
●线性系统的常用描述;
●状态、状态空间、状态空间描述;
●物理系统状态空间描述的建立;
●状态空间描述与其它描述的关系;
●系统的等价变换及其应用.
学习
目标
1.了解系统的常用描述:
外部描述—传递函数、脉冲响
应函数与内部描述—状态空间描述;
2.掌握状态、状态空间的概念和物理系统的状态方程和
输出方程的建立方法;
3.掌握状态空间描述与其它描述的关系;
4.掌握状态转移矩阵的定义、性质及算法和状态方程的
解;
5.掌握等价变换的定义、算法、性质和应用(化特征值标准型)。
LST2系统的运动分析(核心)
参考
课时
6
知识
点
连续时间系统状态方程的解
连续时间系统状态转移矩阵
离散时间系统的状态方程
连续系统的离散化
离散时间系统状态方程的解
学习
目标
1.掌握状态方程解的表达式及其意义;
2.掌握状态转移矩阵的定义、物理意义、性质及算法;
3.知道连续系统离散化的方法、精确算式及系统保持能控/能观性的
条件;
4.知道连续系统离散化的近似算式;
5.掌握离散时间系统状态方程的求解。
LST3稳定性(核心)
参考
课时
8
知识
点
系统的BIBO(有界输入-有界输出)稳定性;
渐近稳定性;
李亚普诺夫(isL意义下的)稳定性;
稳定分析的李亚普诺夫方法(李亚普诺夫函数法);
李亚普诺夫函数的规则化构造方法:
克拉索夫斯基法、变量梯度法。
(选修)
学习
目标
1.了解系统的平衡状态的定义、计算及稳定性的概念;
2学习掌握BIBO稳定性的定义及判据;
3.掌握渐近稳定性的定义及判据:
特征值判据、李亚普诺夫方程判据、
李亚普诺夫函数判别法;
4.掌握李亚普诺夫稳定性的定义及判据:
特征值判据、李亚普诺夫
函数判别法;
5.了解李亚普诺夫函数的规则化构造方法。
LST4能控性与能观测性(核心)
参考
课时
8
知识
点
●能控性与能观测性的定义;
●能控性与能观测性的判据;
●单变量系统的标准型;
●系统的结构分解;
●对偶原理。
学习
目标
1.能阐述能控性和能观测性的物理概念和定义;
2.掌握能控性的判据:
能控性矩阵秩判据、PBH判据、约当型判据。
3.掌握能观测性的判据:
能观性矩阵秩判据、PBH判据、约当型判据。
4.掌握单变量系统的标准型及变换方法。
5.掌握系统的结构分解:
能控性分解和能观性分解及了解能控性/能观性分解的结果;
6.掌握对偶原理:
对偶系统、对偶关系及对偶原理的应用—能观性判别、化能观标准型及能观性分解中的应用。
以后章节还有更多的应用。
LST5最小实现
(选修)
参考
课时
(5)
知识
点
●实现与最小实现
●传递函数最小实现的性质
●标量传递函数的最小实现
●向量传递函数的最小实现
●传递函数矩阵的实现和最小实现
学习
目标
1.了解实现与最小实现;
2.掌握传递函数最小实现的基本性质;
3.掌握标量传递函数的最小实现;
4.掌握向量传递函数的最小实现;
5.了解传递函数矩阵的实现和最小实现。
LST6反馈控制(核心)
参考
课时
12
知识
点
●状态反馈与输出反馈;
●反馈对能控性和能观测性的影响;
●状态反馈极点配置;
●系统的能镇定问题;
●输出反馈极点配置问题(选修);
●解耦控制(选修)。
学习
目标
1.了解两种反馈(状态反馈与输出反馈)的形式及作用;
2.了解两种反馈对能控性和能观测性的影响;
3.掌握状态反馈极点配置的原理、条件及算法:
利用能控标准型的算法及基于Sylvester矩阵方程的算法;
4.掌握系统的能镇定的定义、条件及方法;
5.了解输出反馈极点配置的原理及条件;
6.了解解耦控制的原理、条件及算法。
LST7状态观测器(核心)
参考
课时
8
知识
点
●渐近状态观测器(称状态观测器)
●全阶(维)状态观测器
●降阶(维)状态观测器
●分离性原理
●状态观测器特征值选择的经验公式
学习
目标
1.掌握渐近观测器的工作原理、存在条件—主要是征值能任意配置的条件。
2.掌握全阶(维)状态观测器的设计算法:
化能观标准型的算法、基于Sylvester矩阵方程的算法和利用对偶原理的设计方法。
3.掌握降阶(维)状态观测器的设计算法:
主要是基于Sylvester矩阵方程的算法。
4.了解带观测器的反馈系统的性质,掌握系统设计的分离性原理。
5.了解状态观测器特征值选择的经验数据。
最优控制原理(OCP)
最优控制(OCP)(参考学时数:
16)选修
备注
内容简介
最优控制是控制科学的主要内容,可以为控制系统提高有效地描述处理对象的模型及其控制。
所以,控制科学与技术有关的许多领域都要用到最优控制中的概念。
最优控制包括极小值原理、时间与燃料最优控制、二次型指标最优控制和动态规划等重要内容。
最优控制分析与设计中含有大量最优控制的内容。
例如:
在姿态控制,最优推力方向的研究与学习中要有理解形式证明的能力。
极小值原理中的理论被用于自动控制、过程系统和随机系统等领域。
随着控制科学与技术的日益成熟,越来越完善的分析技术被用于实践,为了理解将来的控制科学技术,学生需要对最优控制有深入的理解。
知识单元
OCP1最优控制的一般表示
OCP2极小值原理
OCP3时间与燃料最优控制
OCP4二次型指标最优控制
OCP5动态规划
知识单元描述
OCP1最优控制的一般表示
参考
课时
(3)
知识
点
●举例(姿态控制,最优推理方向)
●提法(模型,初始状态,性能指标,目标集,容许控制)
●方法(变分,规划)
学习
目标
1.举例解释最优控制的基本概念;
2.说明与模型、指标和控制的关系;
3.说明最优控制的原理。
OCP2极小值原理
参考
课时
(4)
知识
点
●变分法
●伴随方程
●状态方程
●控制方程
●控制约束
●极小值原理
学习
目标
1.使用变分法到一般泛函的结果;
2.说明变分到一般无约束控制的规范方程;
3.用举例证明解决最优控制问题;
4.说明具有控制约束的极小值原理。
OCP3时间与燃料最优控制
参考
课时
(3)
知识
点
●最短时间、最省燃料和时间与燃料综合指标的概念
●Bang-Bang控制推导
●奇异最优控制的概念
●非奇异控制的条件
●Bang-Coast-Bang最优控制
●控制切换次数定理
学习
目标
1.以实例概述最短时间、最省燃料和时间与燃料综合指标;
2.论述对给定的问题Bang-Bang控制推导;
3.奇异最优控制的概念与非奇异控制的条件;
4.给出相应的控制切换次数定理与应用实例。
OCP4二次型指标最优控制
参考
课时
(3)
知识
点
●二次性能指标
●线性状态调节器
●线性输出调节器
●线性伺服系统
●鲁棒调节器的概念
学习
目标
1.解释二次性能指标的意义,包括有限时间和无限时间指标;
2.叙述线性状态调节器原理;
3.给出线性输出调节器的解法;
4.分析建立线性伺服系统方程和鲁棒调节器的概念。
OCP5动态规划
参考
课时
(3)
知识
点
●多级决策
●路线图
●最优性原理
●二次型规划
学习
目标
1.用实例解释多级决策情况;
2.用实例说明和路线图的问题;
3.控制问题最优性原理;
4.离散系统二次型动态规划。
OCP6状态空间
参考
课时
由基础课“现代控制理论”完成
知识
点
●
 升级会员
升级会员 