第4章平面机构力分析习题解答.docx
《第4章平面机构力分析习题解答.docx》由会员分享,可在线阅读,更多相关《第4章平面机构力分析习题解答.docx(11页珍藏版)》请在冰豆网上搜索。
第4章平面机构力分析习题解答
第四章平面机构的力分析解答
典型例题解析
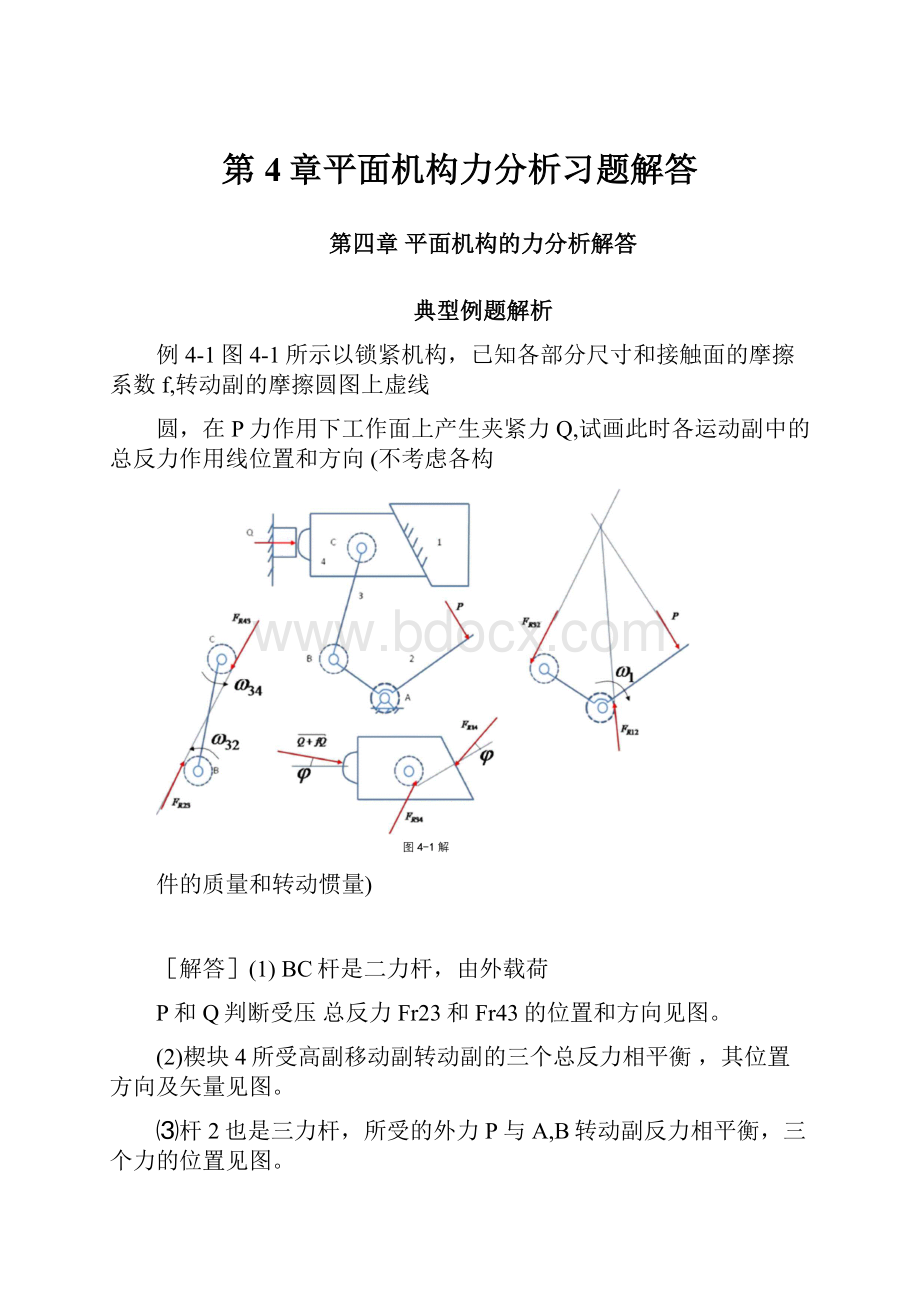
例4-1图4-1所示以锁紧机构,已知各部分尺寸和接触面的摩擦系数f,转动副的摩擦圆图上虚线
圆,在P力作用下工作面上产生夹紧力Q,试画此时各运动副中的总反力作用线位置和方向(不考虑各构
件的质量和转动惯量)
[解答]
(1)BC杆是二力杆,由外载荷
P和Q判断受压总反力Fr23和Fr43的位置和方向见图。
(2)楔块4所受高副移动副转动副的三个总反力相平衡,其位置方向及矢量见图。
⑶杆2也是三力杆,所受的外力P与A,B转动副反力相平衡,三个力的位置见图。
例4-2图示摇块机构,已知一ABC=90,曲柄长度Iab=100mm,lac=200mm,Ibs2=86mm,连
杆的质量m2=2kg,连杆对其质心轴的转动惯量JS2=0.0074kg.m2,曲柄等角速转动=40rad/s,
求连杆的总惯性力及其作用线。
Vb二ilab=4m/s,其方向垂直于AB且为顺时针方向
大小:
160
as2二"aps280m/s2
t艸aC2B
-2
atC2^=JaC2C2=100m/s2
厂160=923.76rad/s2,逆时针方向。
1c2B.lacTab
(3)计算惯性力,惯性力矩
F12=—m?
as2—16(N,方向如图()所示。
M12--Js2-:
S--6.836J.m,方向为顺时针方向。
例4-3在图示的摆动凸轮机构中,已知作用于摆杆3上的外载荷Q,各转动副的轴颈半径r和当量摩
擦系数fv,C点的滑动摩擦因素f以及机构的各部分尺寸。
主动件凸轮2的转向如图,试求图示位置时作用于凸轮2上的驱动力矩M。
[解答]⑴首先画出Fr23,它与C点法线成①角(®=arctanf),偏在法线左侧;
FR23与Q交于一点「31为顺时针,Fr23为顺时针,FR13切于摩擦圆(摩擦圆半径'二f^)与
Fr23Q交于同一点,且对B点形成力矩与--32反向,所以Fri3与摩擦圆的切点在B点左边;
画FR13FR23Q的力矢量封闭多边形,求出FR23。
(2)在C点处画FR32,它与Fr23大小相等方向相反,Fri2切于摩擦圆下方。
(3)驱动力矩M等于Fri2与Fr32形成力偶,Fr32与Fri2距离为I,则M=Fr2iI。
例4-3在图所示的颚式破碎机中,已知各构件的尺寸重力及其对本身质心轴的转动惯量,以及矿石
加于活动颚板2上的压力Fr,设构件1以等角速度'1转动方向如图,其重力可忽略不计,求作用在其上点
E沿已知方向XX的平衡力Fb以及各运动副中的反力。
[解答]
(1)作机构的运动简图速度多边形及加速度多边形
用机构比例尺7速度比例尺Jv加速度比例尺va作图如⑻(b)(c)。
(2)确定各构件的惯性力惯性力偶
FG2
F|2二F|2二-m2as2Ps2a
g
h|2二乎
FI2
aCBn;cPa
MI2二_JS2-2二_JS2二_JS2—
1BC1BC
FG3
Fi3=Fi3=「吨3$3PS3'a
g
aC菇a
MI3二一JS3-3二一JS3二一JS2—
lCDlCD
MI3
h|2二
FI3
(4)确定运动副反力及平衡力
1)取杆组23作力图如图(d)
2)列出静力平衡方程式
—■n—tn—t
F12F12Fi2FrFG2Fg3F13F43F43=0
3)借助于力矩方程求解,考虑构件3的平衡及考虑构件2的平衡
'MC=0,FG3h4-卩|3怆-卩:
43也=0解出FR43的大小
'Mc=QFG2h2Frhr-F|2^-FR』bc=0解出卩爲的大小
4)取力比例尺JF作力图,如(e)图
FR12二-Fr12二jb"f
5)取曲柄1作力图如(f)图
PbFR21FR41二0
6)取力比例尺JF作力图,女如(g)图
Fr41二—Fr14二bc^FPb^calF方向如图示
第4章习题解答
4-13题[解答]
以曲柄滑块机构的第一位置(a)为例分析(属于考虑轴颈摩擦的受力分析)
(1)取2构件为研究对象,当角速度为顺时针转动时,观察转动副A处构件2相对1之间的夹角在逐渐减少,故相对角速度--21沿顺时针方向,再观察转动副B处构件2相对于3之间的夹角在逐渐增大,故相对角速度-.23沿顺时针方向;
(2)根据外载荷M和F的方向,判断二力杆2是受压;
(3)根据全反力Fr12衡于摩擦圆相切,而且全反力Fr12对A点取矩是企图阻止角速度'21的转动的,故FR12切于摩擦圆的下方;全反力FR32对B点取矩是企图阻止-23的转动的,故FR32切于摩擦圆的上方。
由于构件2受Fr12和FR32作用下任处于平衡,即两力的作用线应共线。
即作用线应同时切于
A处摩擦圆的下方和B处摩擦圆的上方,画出力图如图(a)示。
其余两位置分析步骤类似(略)。
(同学们只画出力图就行了,分析过程不用写出)
4-14题[解答]
4-8题[解答]
(1)作机构运动简图
取尺寸比例尺叫=0.005m/mm,准确的作出机构运动简图,如图⑻所示。
(2)对机构进行运动分析
:
i=2~ni/60=2汎:
1500/60=157.1rac/s
Vb-Fab=157.10.1m/s=15.7m/s
22aB=1lAB=(157.1)0.1m/s=2468.0m/s
构件2上B、C两点间的运动关系为
VC=
VB
VCB
大小:
?
',1lAB
?
方向:
AC
-AB
-BC
取速度比例尺%=
1(m/s)/mm,作速度如图
(b)所示。
VcB
巴be
一111—33.3rad/s
0.33
■2-
lBC
lAB
ac=
ab
-n
acB
”TacB
大小:
?
2
''1lAB
2
''1lAB
?
方向:
AC
B>A
C>B
-BC
aCB='2lBc=(33.3)20.33m/s=365.9m/s2
取加速度比例尺Ja=36.59(m/s)/mm,作加速度如图(c)所示。
aC="aPc=36.5947m/s=1719.73m/s其p方向由c指向。
根据加速度影响原理求点
S2,于是得
(3)求构件的惯性力活塞的惯性力
Fic=-m3ac
211719.73=3685.1N方向与aC相反。
9.8
连杆的总惯性力
F12=F|2=-m2aS2
G2
as2
至2085.63=5325.5N
9.8
连杆的惯性力矩
MI2=-JS2-:
:
2=-Js2
lBC
=-Js2
abc其方向与二2相反。
lBC
总惯性力与质心处的偏矩
hi2
M2I
FI2
4-19题[解答]
(1)取构件2为分离体作力图,如图(b)。
(不考虑摩擦)
B
LR32
b
Fl
-Fri2
(C)
Fi2h[-Frh?
Fr12
ICO2
根据构件2的力平衡条件,得
FR12F|2FrFr32=0
方程中仅有Fr32的大小与方向未知,故可用作图法求解。
取合适的力比例尺,作力多边形如图(C)。
Fr32=jFda其方向由d指向a。
(2)取构件1作力图,如图(d)
根据构件2的力平衡条件,得
Fr21F|i*Fr3i=0
方程中仅有Fr31的大小与方向未知,故可用作图法求解。
取合适的力比例尺,作力多边形如图(e)。
Fr31=」Fda其方向由d指向a
根据'MO1(F^0,可得
Mb=FR21h3方向为顺时针
 升级会员
升级会员 