boost反馈电路.docx
《boost反馈电路.docx》由会员分享,可在线阅读,更多相关《boost反馈电路.docx(12页珍藏版)》请在冰豆网上搜索。
boost反馈电路
Boost反馈控制器设计
专业:
学号:
姓名:
一、设计要求
设计Boost反馈校正电路,使得输入10V,输出15V,并分析输出响应的快速性与静态误差。
二、原系统分析
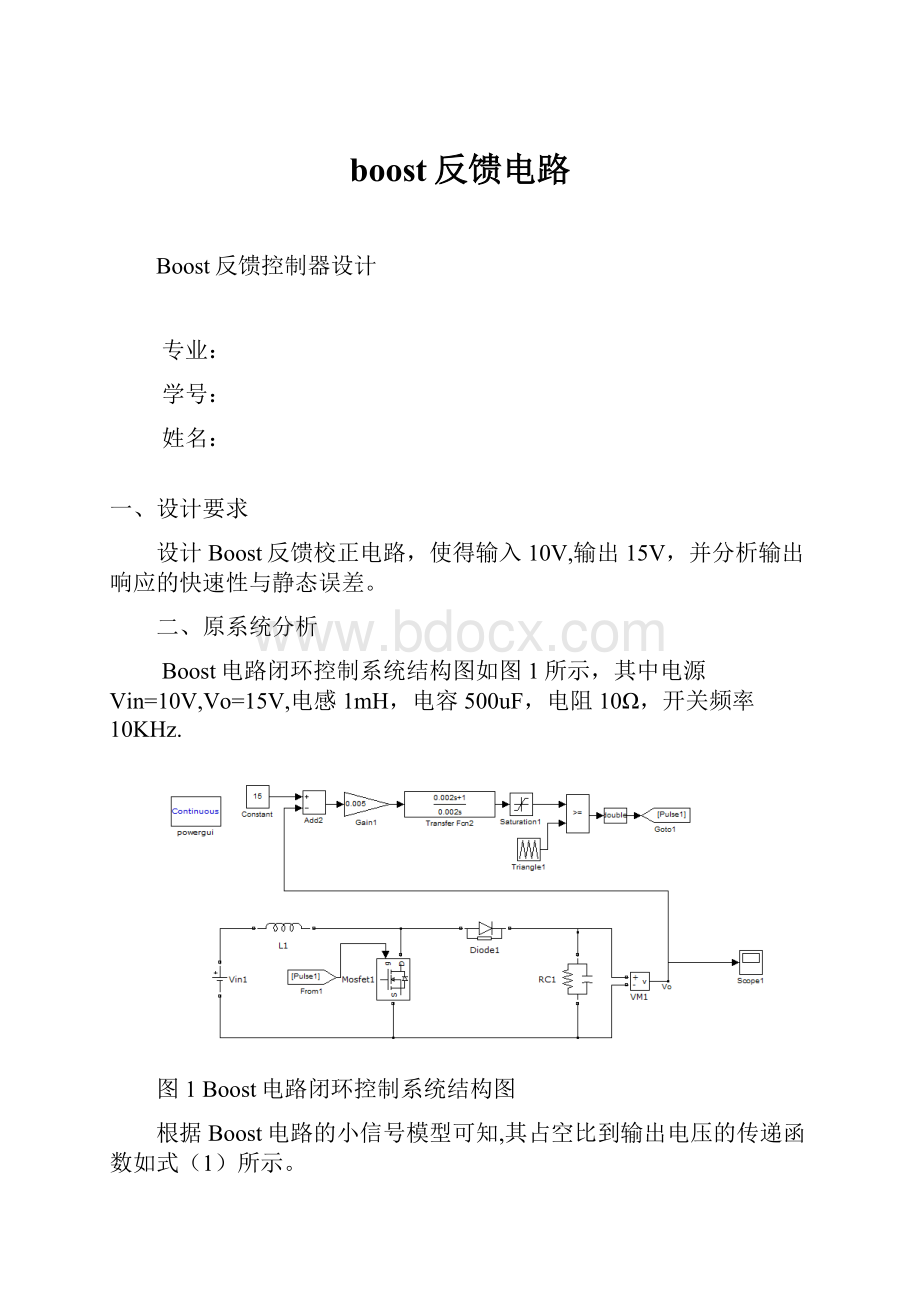
Boost电路闭环控制系统结构图如图1所示,其中电源Vin=10V,Vo=15V,电感1mH,电容500uF,电阻10Ω,开关频率10KHz.
图1Boost电路闭环控制系统结构图
根据Boost电路的小信号模型可知,其占空比到输出电压的传递函数如式
(1)所示。
(1)
图2原始系统的波特图
可见该传递函数是一个非最小相位系统,其波特图如图2所示.
电路的幅值裕度:
GM=-27dB,相位裕度:
—50.6deg
其稳定判据显示系统不稳定。
三、PI控制器校正分析
经过之前分析,原系统不稳定,原因是原始回路中频以—40dB/dec的斜率穿越0dB线,此时对应最小相位系统相频图中相移为—180度,—20dB/dec对应—90度,所以应使校正后的系统以-20dB/dec的斜率穿越0dB线,这样就会有较好的相位稳定性。
为使系统无静态误差,采用PI校正(K(τs+1)/(τs)),这时即使比例系数较小,由于积分项的作用,仍能够消除静态误差。
应该使PI调节器的零点频率明显低1/原系统开环传递函数极点频率ω0,使得校正后的开环传递函数在相移1800时的频率不至于有太大的降低,否则截止频率将会更低.据此可选PI调节器的零点频率1/τ=0。
5ω0,即
τ=1/(0。
5ω0)
(2)
PI调节器的零点频率确定以后,改变PI调节器的比例系数K即可改变校正后的开环传递函数的截止频率和相位稳定裕量。
由图1中的幅频特性可知,原系统在极点频率处有约40db的谐振峰值,因此设计PI比例系数时必须考虑这个因数,否则可能在ω0附近由于开环增益大于零而使系统不稳定.PI调节器的增益为-40db时对应的频率为
,且
处于PI调节器幅频特性的-20db/dec段,则有20lg(K/(τ
))+A0=0,A0为原系统开环特性的谐振峰值(db)。
取
为PI调节器零点频率的一半,即
=0。
5/τ,则有
K=τ
10—A0/20=0。
5*10—A0/20(3)
据此可计算得到τ=1/(0.5*1000)=0。
002,K=0.5*10—40/20=0。
005。
由此得到的PI调节器的波特图、系统校正后的开环传递函数的波特图如图3中所示,由图4可知,系统校正后的开环传递函幅频特性以—20db/dec过零,相位稳定裕量为940,系统是稳定的。
图3采用PI调节器时的波特图
Boost变换器的负反馈控制系统传递函数图如图4所示,其中,Gvd(s)为占空比至输出的传递函数,Gm(s)为PWM脉宽调制器的传递函数,Gc(s)为PI调节器的传递函数,H(s)表示反馈通路的传递函数。
图4Boost变换器的负反馈控制系统传递函数图
采用PI调节时系统输出响应如图5所示,可以看出系统相应速度较快,且无静态误差.
图5R=10
,K=0.005时系统响应
改变比例系数,观察比例系数对系统的影响,如图6,图7所示。
可见,比例系数越小,响应速度越慢。
但比例系数越大,系统稳定性越差,甚至引起不稳定。
图6R=10
,K=0。
004时系统响应图7R=10
,K=0.008时系统响应
可以看出在K=0。
005时系统快速性较好,仿真在K=0.005时,不同功率时的输出响应.仿真结果,如图8、图9、图10所示.可以看出,功率越大,系统的响应速度越快,由于采用PI控制,均无稳态误差.
图8K=0.005,R=20
时系统响应
图9K=0。
005,R=8
时系统响应
图8K=0.005,R=10
时系统响应
四、超前滞后校正分析
PI调节器的比例系数增大,则校正后的系统的幅频特性在ω0附近将会大于0,而相移正好在1800附近,将会使得系统不稳定。
但这样的校正方法,系统校正后的开环传递函的截止频率较低,使得系统的动态响应较慢.
超前滞后校正环节,在调节系统响应质量方面具有更大的灵活性。
若将超前滞后环节的两个零点和极点分别设计得相同,则传递函数可为K(τ1s+1)2/[s(τ2s+1)2],一般τ1>τ2。
由于该调节器在一定的频率段具有相位超前特性,因此可以使得校正后的开环传递相移1800时的频率点得到改变,若增大这个频率,则可使校正后的系统地截止频率提高,以提高系统的响应速度。
首先来确定调节器的零点频率,一般使得零点频率为原始系统极点频率ω0的0。
5倍,即1/τ1=0。
5ω0,则有
τ1=2/ω0(4)
为使调节器的超前特性充分发挥出来,其零极点对应的频率差应该尽可能大,可使极点频率与零点频率之比为100,即
τ2=τ1/100(5)
代入数据得τ1=2/ω0=2/1000=1/500,τ2=τ1/100=1/500/100=1/50000。
为避免原始电路的影响,补偿后的穿越频率应该小于零点频率,取开关频率的1/8,即使校正后的频率为1.25*103,如图2所示,此时对应的增益AC0为29。
3db,因此要求调节器在ωc处具有—29。
3db的增益,由此可以得到调节器比例系数K的计算式为20lg(Kτ12ωc)=—AC0,即
K=10(—AC0/20)/(τ12ωc)(6)
根据式(4)、(5)、(6)可以计算得到,K=10(—29。
3/20)/(1/5002*1250)=6。
8。
由此得到的波特图分别如图11所示,其中曲线1、2、3分别表示原始系统、超前滞后校正系统、校正后的系统.
由图11的相频特性可以看出,校正后的系统相移1800时的频率为8000rad/s,远大于原始系统相应的频率1300rad/s,为提高校正后系统的截止频率提供了可能。
图11采用超前滞后调节器时的波特图
加入超前滞后调节器后的系统响应如图12、图13所示。
图12R=10
时超前滞后校正输出响应
图13R=20
时超前滞后校正输出响应
五、总结
通过对比图8和图13,可以看出采用超前滞后校正,能使系统响应尽快达到稳定,两种校正方法均实现了无静态误差。
部分MATLAB程序附录
w=-8*pi:
0.01:
8*pi;
b=[-8.1e-2,360];
a=[1。
8e—5,3。
6e-3,16];
sys=tf(b,a);
bode(sys);
holdon;
c=[1e—5,5e-3];
d=[2e—3,0];
sys1=tf(c,d);
bode(sys1)
gridon;
holdon;
x2=conv([—8.1e-2,360],[1e-5,5e—3]);
y2=conv([1.8e-5,3.6e—3,16],[2e—3,0]);
margin(x2,y2);
w=-8*pi:
0.01:
8*pi;
b=[—8.1e—2,360];
a=[1。
8e—5,3.6e—3,16];
sys=tf(b,a);
bode(sys);
holdon;
c=[2。
72e—5,2.72e—2,6。
8];
d=[4e-10,4e-5,1,0];
sys1=tf(c,d);
bode(sys1)
gridon;
holdon;
x2=conv([-8。
1e—2,360],[2.72e-5,2。
72e-2,6.8]);
y2=conv([1。
8e—5,3.6e—3,16],[4e-10,4e-5,1,0]);
margin(x2,y2);
 升级会员
升级会员 