机器人实训报告.docx
《机器人实训报告.docx》由会员分享,可在线阅读,更多相关《机器人实训报告.docx(18页珍藏版)》请在冰豆网上搜索。
机器人实训报告
M-6iB机器人+PLC+机器人IO+CCLINK从站D一、项目要求
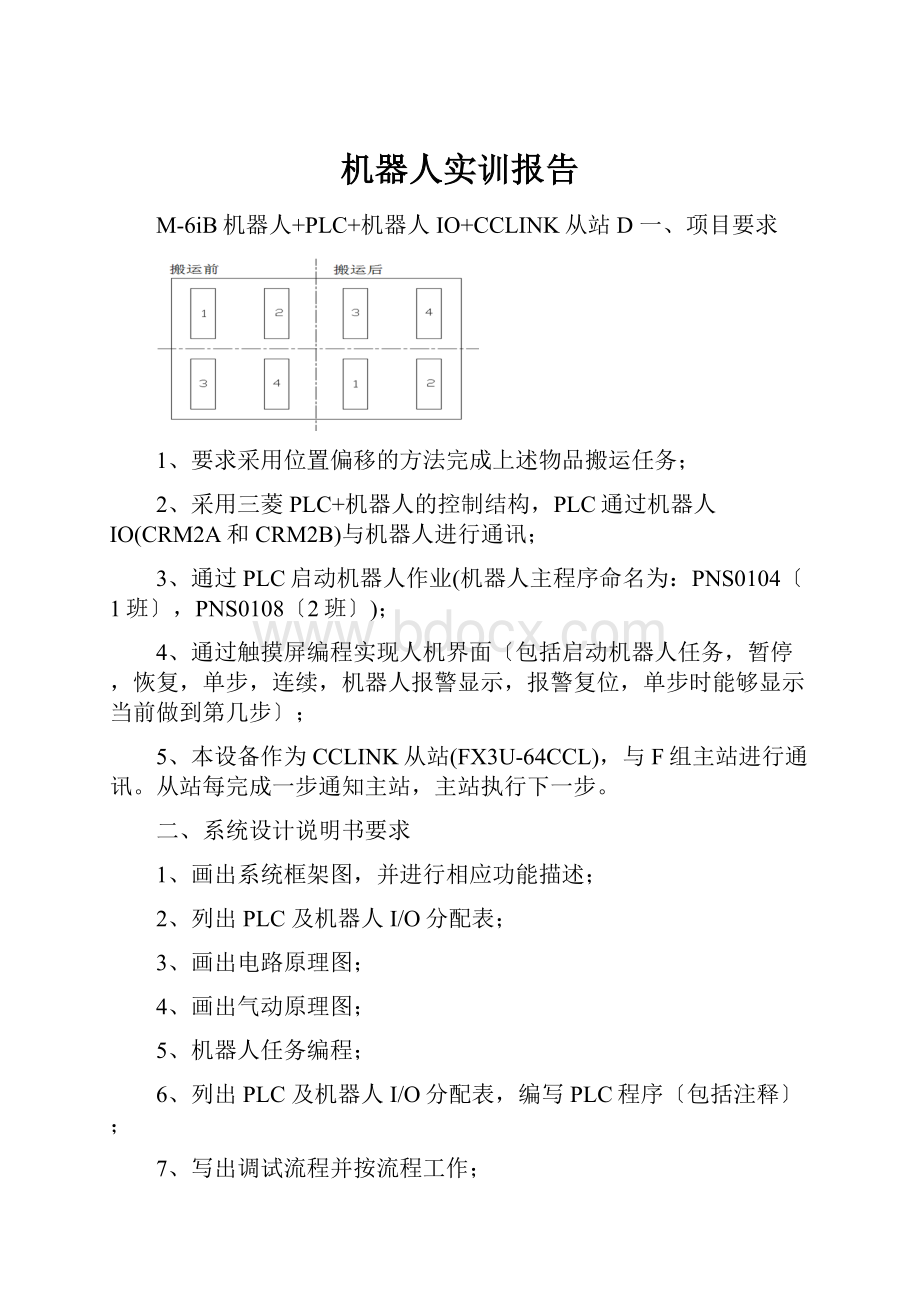
1、要求采用位置偏移的方法完成上述物品搬运任务;
2、采用三菱PLC+机器人的控制结构,PLC通过机器人IO(CRM2A和CRM2B)与机器人进行通讯;
3、通过PLC启动机器人作业(机器人主程序命名为:
PNS0104〔1班〕,PNS0108〔2班〕);
4、通过触摸屏编程实现人机界面〔包括启动机器人任务,暂停,恢复,单步,连续,机器人报警显示,报警复位,单步时能够显示当前做到第几步〕;
5、本设备作为CCLINK从站(FX3U-64CCL),与F组主站进行通讯。
从站每完成一步通知主站,主站执行下一步。
二、系统设计说明书要求
1、画出系统框架图,并进行相应功能描述;
2、列出PLC及机器人I/O分配表;
3、画出电路原理图;
4、画出气动原理图;
5、机器人任务编程;
6、列出PLC及机器人I/O分配表,编写PLC程序〔包括注释〕;
7、写出调试流程并按流程工作;
8、完成全部实践文件,现场测试与答辩;
9、实践的心得与建议;
10、参考资料。
任务书:
实训报告:
〔三〕威纶触摸屏编程界面………………………………………………………………………….10
六、调试流程…………………………………………………………………………………………………………15
工业机器人项目综合训练
一、系统框图及功能描述
〔一〕、系统框图
电脑与PLC及触摸屏进行通讯,将PLC程序和触摸屏程序分别导入。
通过触摸屏的控制按钮操控PLC程序中软元件的开闭状态来控制是否调用机器人程序从而控制机器人的动作,机器人由示教编程,程序存储在示教盒内由PLC程序控制其调用。
〔二〕、Fanuc机器人
Fanuc机器人硬件主要包括:
机器人本体(Robot),控制柜(包括用户操作面板),示教盒(TeachPendant)等。
主要功能包括:
Arcwelding(弧焊),Spotwelding(点焊),Handling(搬运),Sealing(涂胶),Painting(喷漆),Palleting(码垛),Assembling(装配),去毛刺,切割,激光焊接,测量等。
〔三〕、PLC〔可编程序控制器〕
PLC的定义:
可编程序控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式、模拟式的输入和输出,控制各种类型的机械或生产过程。
可编程序控制器及其有关设备,都应按易于使工业控制系统形成一个整体,易于扩充其功能的原则设计。
PLC是一种用程序来改变控制功能的工业控制电脑,除了能完成各种各样的控制功能外,还有与其他电脑通信联网的功能。
系统构成〔功能扩展板块/连接器转换适配器/存储器盒/显示模块的系统组成〕
功能扩展板块,连接器转换适配器,存储器盒,显示模块的组合,可以连接的位置,台数,无论基本单元的点数如何,均如下所示。
1.FX3u-16MR/ES-A,FX3u-32MR/ES-A
2.端子排列
〔四〕.威纶通触摸屏
威纶通系列触摸面板全线内置电源隔离保护器,触摸屏均为电阻屏,支持MPI187.5K连接,常规产品分辨率均为800×480以上,均采用EB8000同一套软件,具有强大的兼容能力,能适用于市面上95%常见的PLC、变频器、工控机等自动化设备。
二、电路原理图〔电气部分的说明〕
Plc外部线路连接:
三、气动原理图
四、列出PLC及机器人I/O分配表,编写PLC程序〔包括注释〕
〔1〕、PLC及机器人I/O分配表:
机器人输出
PL输入
功能定义
机器人输入
PLC输出
功能定义
CRM2B(33〕
DO[1]
X1
电磁阀信号
CRM2A(01)
*TMSTP
Y10
紧急停机信号
CRM2A(35)PROGRUN
X5
程序执行输出信号
Y4
气阀
CRM2B(35)
DO[3]
X11
按步输出
CRM2A(04)
CSTOP1
Y0
安全速度信号
CRM2B(36)
DO[4]
X12
计数复位
CRM2A(10)PNS4
Y1
程序号选择
CRM2A(39)FAULT
X7
错误输出
CRM2A(28)
ENBL
Y7
使能信号
CRM2A(06)START
Y6
启动信号
CRM2A(29)PNSSTROBEPN
Y2
滤波信号
CRM2A(25)
FAULTRESET
Y5
报警复位
信号
〔2〕、软元件分配表
软元件
定义
软元件
定义
M20
总开关
M15
复位
M30
开始执行
M40
跳出
M10
单步连续切换
M50
报警灯
M12
暂停
M13
继续
(三)、威纶触摸屏编程界面
总开关:
控制PLC程序;急停:
机器人紧急停止;暂停:
机器人暂停;复位:
解除警报;运行状态切换:
切换运行状态〔自动/单步〕;执行:
调用执行示教程序
操作过程:
首先打开总开关,点击复位按钮。
运行状态切换开关控制机器人的自动/单步运行。
自动运行时,机器人自动将4个工件依次由左移动至右,每移动一个工件,工件状态指示灯会跳转。
单步运行时,每移动一次工件,机器人都会暂停操作,需点击复位后再进行下一步操作。
机器人紧急停止时,报警灯亮起,点击复位按钮解除报。
(四)、PLC梯形图
五、机器人程序
1:
LP[1]100mm/secFINE//示教点1
2:
LP[2]100mm/secFINE//示教点2
3:
PR[2]=P[2]
4:
DO[4]=ON//计数重置
5:
WAIT1.00(sec)//等待1秒
6:
DO[4]=OFF//信号关闭
7:
DO[3]=ON//第一步
8WAIT1.00(sec)//等待1秒
9DO[3]=OFF//信号关闭
10:
PR[2,3]=PR[2,3]-100
11:
LPR[2]100mm/secFINE//移动
12:
DO[1]=ON//气阀接通,手爪闭合
13:
PR[3]=PR[2]
14:
PR[3,3]=PR[2,3]+100
15:
LPR[3]100mm/secFINE//移动
16:
PR[4,2]=PR[3,2]+155
17:
PR[4,1]=PR[3,1]+105
18:
LPR[4]100mm/secFINE//移动
19:
PR[5]=PR[4]
20:
PR[5,3]=PR[4,3]-100
21:
LPR[5]100mm/secFINE//移动
22:
DO[1]=OFF//气阀关闭,手爪张开
23:
PR[6]=PR[5]
24:
PR[6,3]=PR[5,3]+100
25:
LPR[6]100mm/secFINE//移动
26:
PR[7]=PR[6]
27:
PR[7,1]=PR[6,1]-105
28:
PR[7,2]=PR[6,2]-80
29:
LPR[7]100mm/secFINE//移动
30:
PR[8]=PR[7]
31:
DO[3]=ON//第一步
32WAIT1.00(sec)//等待1秒
33DO[3]=OFF//信号关闭
34
35:
PR[8,3]=PR[7,3]-100
36:
LPR[8]100mm/secFINE//移动
37:
DO[1]=ON//气阀接通,手爪闭合
38:
PR[9]=PR[8]
39:
PR[9,3]=PR[8,3]+100
40:
LPR[9]100mm/secFINE//移动
41:
PR[10]=PR[9]
42:
PR[10,1]=PR[9,1]+105
43:
PR[10,2]=PR[9,2]+155
44:
LPR[10]100mm/secFINE//移动
45:
PR[11]=PR[10]
46:
PR[11,3]=PR[10,3]-100
47:
LPR[11]100mm/secFINE//移动
48:
DO[1]=OFF//气阀关闭,手爪张开
49:
PR[12]=PR[11]
50:
PR[12,3]=PR[11,3]+100
51:
LPR[12]100mm/secFINE//移动
52:
PR[13]=PR[12]
53:
PR[13,2]=PR[12,2]-230
54:
LPR[13]100mm/secFINE//移动
55:
PR[14]=PR[13]
56:
DO[3]=ON//第一步
57:
WAIT1.00(sec)//等待1秒
58:
DO[3]=OFF//信号关闭
59:
PR[14,3]=PR[13,3]-100
60:
LPR[14]100mm/secFINE//移动
61:
DO[1]=ON//气阀接通,手爪闭合
62:
PR[15]=PR[14]
63:
PR[15,3]=PR[14,3]+100
64:
LPR[15]100mm/secFINE//移动
65:
PR[16]=PR[15]
66:
PR[16,2]=PR[15,2]+155
67:
PR[16,1]=PR[15,1]-105
68:
LPR[16]100mm/secFINE//移动
69:
PR[17]=PR[16]
70:
PR[17,3]=PR[16,3]-100
71:
LPR[17]100mm/secFINE//移动
72:
DO[1]=OFF//气阀关闭,手爪张开
73:
PR[18]=PR[17]
74:
PR[18,3]=PR[17,3]+100
75:
LPR[18]100mm/secFINE//移动
76:
PR[19]=PR[18]
77:
PR[19,2]=PR[18,2]-80
78:
PR[19,1]=PR[18,1]+105
79:
LPR[19]100mm/secFINE//移动
80:
PR[20]=PR[19]
81:
DO[3]=ON//第一步
82:
WAIT1.00(sec)//等待1秒
83:
DO[3]=OFF//信号关闭
84:
PR[20,3]=PR[19,3]-100
85:
LPR[20]100mm/secFINE//移动
86:
DO[1]=ON//气阀接通,手爪闭合
87:
PR[21]=PR[20]
88:
PR[21,3]=PR[20,3]+100
89:
LPR[21]100mm/secFINE//移动
90:
PR[22]=PR[21]
91:
PR[22,2]=PR[21,2]+155
92:
PR[22,1]=PR[21,1]-105
93:
LPR[22]100mm/secFINE//移动
94:
PR[23]=PR[22]
95:
PR[23,3]=PR[22,3]-100
96:
LPR[23]100mm/secFINE//移动
97:
DO[1]=OFF//气阀关闭,手爪张开
98:
PR[24]=PR[23]
99:
PR[24,3]=PR[23,3]+100
100:
LPR[24]100mm/secFINE//移动
101:
PR[25]=P[1]
102:
DO[4]=ON//第一步
103:
WAIT1.00(sec)//等待1秒
104:
DO[4]=OFF//信号关闭
105:
LPR[25]100mm/secFINE
[End]
六、调试流程〔包括调试过程中存在的问题、解决问题的思路及方法〕
调试过程中,我们分别进行了如下操作:
1.将程序导入到PLC中;
2.将EB8000中绘制的触摸屏程序导入到威纶触摸屏中;
3.将威纶触摸屏的数据线与PLC相连,将PLC至于“RUN”状态;
4.点击“控制界面”按钮,进入操作界面;
5.按下“启动/停止”,此时,系统进入运行状态;
6. 按下“连动/单步”,选择运动模式;
7.按下“复位”按钮,等待“FAULT”指示灯熄灭;
8.点击“执行”按钮,系统的运行状态取决于“自动运行/单步运行”按钮的位置〔两种运行模式可以在机器人运行时相互切换〕;
9.在“自动运行”模式时,只要点击“执行/Do”按钮,系统执行整个程序将四个木块一次全部搬至设定位置;
10.在“单步运行”模式时,点击“执行/Do”按钮,系统分四次将木块搬至设定位置;点击“继续/Continue”按钮,机器人继续搬运下一个木块,直至四个搬运完成;
11.在机器人运行的过程中,点击“暂停/Pause”按钮,可实现程序执行的暂停功能,需继续运行时,再点击“继续/Continue”按钮,程序继续执行,机器人继续工作。
12.在遇到错误时,会触发“急停”,需要继续运行时,先按下“复位”,然后按下“继续”,可继续执行,或选择“跳出”,按下“执行”,会回到原点开始执行。
PLC的各种功能均通过触摸屏顺利实现,调试成功。
七、实践的心得与建议
八、参考资料
【1】工业机器人实训指导书
【2】《工业机器人项目综合训练》装置说明
【3】controllermaintenance有接线说明
【4】FX3U-16CCL-MUSER'SMANUAL
 升级会员
升级会员 