MWC飞控.docx
《MWC飞控.docx》由会员分享,可在线阅读,更多相关《MWC飞控.docx(42页珍藏版)》请在冰豆网上搜索。
MWC飞控
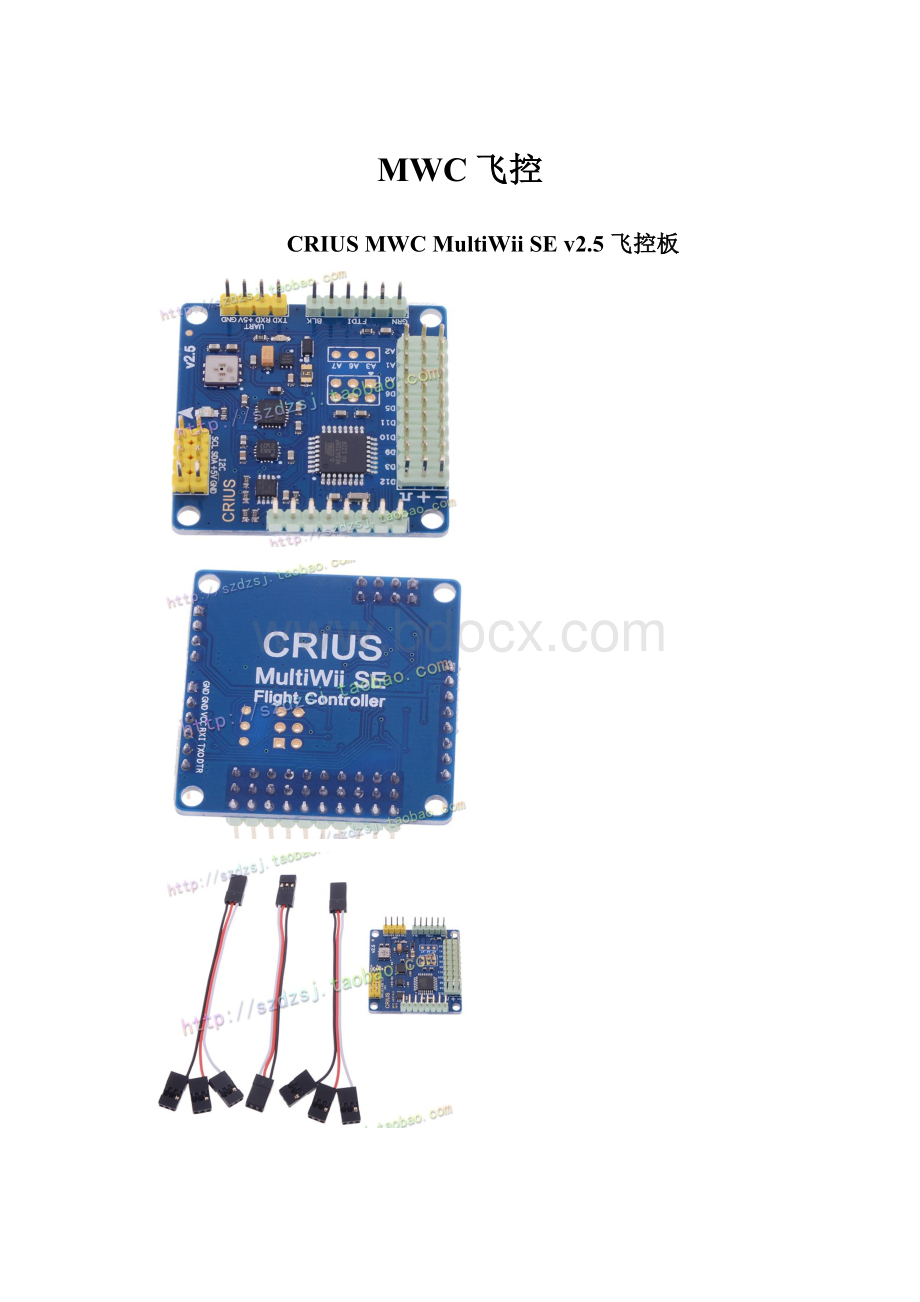
CRIUSMWCMultiWiiSEv2.5飞控板
MWC是不带任何说明书和操作指南,可以自己登陆官网查看,以下为官网网址:
SEv2.5硬件特点
1优化布局,信号输入/输出接口位置更合理;
2更换性能更好的陀螺/加速度一体化6轴传感器;
2使用专用I2C电平转换IC;
2具有FTDI保护设计,防止外部供电与USB供电冲突;
3带有I2C(5V电平)接口,可连接I2C-GPS导航板/OLED显示屏等外围设备;
4尺寸紧凑,可装在迷你机架上,也可通过CRIUS分电板转换成“标准”45mm安装孔距。
MWC固件简介
MWC是MultiWiiCopter的缩写,它并不是指硬件产品,而是开源固件。
此固件的原创作者是来自法国的Alex,他为了打造自己的Y3飞行器而开发了最初的MWC固件(原创交流帖与官网的链接在最下方)。
几年来经过许多高手的参与及共同努力,开发进度越来越快。
现在MWC已经基本成熟,可以支持更广泛的硬件平台、外围设备及更多飞行模式,让运行MWC的飞控硬件成为国外开源飞控市场上占有率最高之一的产品。
MWC固件支持的硬件平台
MWC固件是用ArduinoIDE来编写,支持Arduino发布的几种主要的AVR开发板ProMini/ProMicro/Mega等,也可支持使用STM32的Arduino兼容平台,但STM32目前无法体现出任何性能与端口上的优势,所以仍以AVR为主流,成熟、够用且稳定。
本产品CRIUSMultiWiiStandardEdition(SE)v2.0是基于ArduinoProMini来设计,使用ATmega328P单片机。
MWC固件支持的外围设备
1蓝牙调参模块-用安卓手机/平板电脑来调试参数(推荐使用)
2OLED显示屏模块-可作为机载状态/参数显示器,也可搭配遥控器进行参数调试(不建议使用)
3I2C-GPS导航板-328P飞控可通过它连接GPS,用于定点/自动返航以及航点飞行功能
4GPS-用于定点/自动返航
5OSD-FPV必备,可显示飞控与GPS数据
6数传模块-APC2XX/Xbee/3DRRadio等,用于遥测功能
7光流模块-用于定点飞行
8声纳模块-用于低空高精度定高飞行
CRIUS的2款飞控,运行MWC时所支持的设备对比
AIOP:
1/2/4/5/6/7/8
SE:
1/2/3/4/5/6/8
MWC固件支持的飞行器模式
下载最新的固件可支持以下飞行器模式,可自由在源代码中选择所需的模式并上传到飞控。
◆GIMBAL-独立的云台稳定器(非飞控用途)
◆SINGLECOPTER-VTOL单轴
◆BICOPTER-2轴阿凡达飞行器
◆Tricopter-Y型3轴
◆QUADP-经典4轴+模式
◆QUADX-4轴×模式
◆Y4-Y型4轴
◆Y6-Y型6轴
◆HEX6-6轴+模式
◆HEX6X-6轴×模式
◆OCTOX8-8轴×4模式
◆OCTOFLATP-8轴水平+模式
◆OCTOFLATX-8轴水平×模式
◆FLYINGWING-飞翼
◆VTAIL4-V型尾翼4轴(飞行方式同×模式,转向更灵活,主要作为固定翼来飞行)
◆AIRPLANE-固定翼
◆HELI_120_CCPM-直升机/120°倾斜盘,开发中,不建议使用
◆HELI_90_DEG-直升机/90°倾斜盘,开发中,不建议使用
MWC固件对遥控器的规格要求
◆MWC需要至少4通道,但4通道遥控器无法切换飞行模式,强烈推荐6通道以上并带有至少两个开关通道
◆需具有子微调(SubTrim)及通道行程(ATV)调整功能
◆需支持固定翼模式(无混控模式)CRIUSSE标准版飞控用于多轴飞行器时可实现以下基本功能
◆ACRO(无自稳,与KK类似)
◆自稳
◆定高
◆锁定航向
◆HeadFree(无头模式,MK称"CareFree",ACM称"Simple")
可通过遥控器开关通道指定为几项基本功能的组合,例如:
自稳+定高+锁定航向,可短时间脱控;
自稳+定高+锁定航向+定点悬停*,可完全脱控
自稳+定高+锁定航向+自动返航*
带有*表示需要连接I2C-GPS导航板与GPS接收机,可以另咨询
CRIUSSE标准版飞控的尺寸参数
◆长宽(mm):
40×40
◆高度(mm):
11.6
◆重量(g):
9.3
◆固定孔孔距(mm):
35mm
◆固定孔直径(mm):
Φ3.1
飞控尺寸图
飞控与CRIUS配线板组合在一起,可转换为大多数机架可用的45mm孔距。
请注意此售价不含配线板、尼龙隔离柱/螺丝等附件。
CRIUSMultiWiiSEv2.5硬件特征
◆ATMega328P单片机
◆MPU6050数字三轴陀螺与三轴加速度传感器(自稳用)
◆BMP085数字气压传感器(锁定高度用)
◆HMC5883L三轴数字磁阻传感器(电子罗盘,锁定航向用)
◆3.3V超低噪音电源稳压器
◆高亮度状态指示LED
◆PCA9306DP1专用I2C电平转换IC
◆FTDI接口带有保护用的二极管及500mA自恢复保险丝
调试MWCSE飞控的工具和方法
1连接FTDI,用USB线连接电脑,运行GUI软件工具调试,这也是最初设置飞控(或者上传固件)时必用的方法;
2连接蓝牙透传模块,用安卓手机/平板电脑/PC笔记本调试,相应的软件工具是MultiWiiConfigurator;
3使用机载OLED显示屏,可显示飞控状态,或者进入编程模式调试参数;
4连接其他数据传输模块,例如常见的APC2XX/3DR/Xbee数传,可与电脑连接,用GUI调试,这是唯一可远距离飞行调试的方法。
推荐使用方法1/2/3
MWC与其他开源方案相比,具有调试方法直观,飞行稳定性好,故障率低的优点,但我们不建议从未接触过多轴飞行器的模友直接选用此飞控。
因为MWC的PID参数不容易调好到完美状态,且参数受外部因素影响较为明细,又增加了调试上的麻烦。
MWC飞控适合喜欢高性价比、有折腾精神的朋友选用,购买前需要有一定的心里准备,最好是能有一些多轴飞行器相关的使用经验或者知识积累。
我们将为购买CRIUSMultiWiiSE标准版v1.0飞控的朋友提供电子版设置指南,以便于快速安装与调试。
NEO-6v3.0NEO-6MGPS模块
NEO-6GPSv3.0主要特征:
1进口品牌太盟25×25mm大尺寸陶瓷天线,搭配低噪音放大器与过滤器组合成ublox官方推荐的最佳性能组合方案,还有更大的信号反射面积,让信号灵敏度比之前的版本更好;
2板载参数保存用的EEPROM,断电后可永久保存配置参数;
3进口molex1.25mm-4pin插座,并采用ublox官方推荐的EMI方案,输入输出均通过磁珠且输入端口增加电阻,完美兼容5V电平信号输入(6M模块本身是3.3V电平信号)。
4可保护长时间的电源反接,防止意外烧毁稳压器;
5带有定位指示灯(绿色)与电源指示灯(蓝色),锁定≥3颗星后定位指示灯开始闪烁,默认频率1Hz。
瑞士u-blox是全球公认的民用最佳GPS模块厂家。
NEO-6M模块的定位效果非常让人满意,许多的高品质GPS产品也广泛采用此系列模块。
不过因为产品定位的关系,有些功能被削弱,如无法保存配置参数和无Flash芯片(无法升级固件),但定位精度与更高级别的LEA-6X系列保持一致。
NEO-6GPSv3.0带有标准的UART(TTL)串行接口,可通用于所有飞控或其他设备。
默认9600波特率/刷新率1hz(ublox官方默认值),如需修改参数,可使用FTDI或者其他USB-TTL工具,接上电脑后使用官方设置工具u-center进行。
基于328P的MWC(如CRIUSSE)通过导航板使用GPS时,波特率需设置成115200/刷新率5hz;MEGA平台飞控(如CRIUSAIOP)用MPNG(海盗)固件时可在源代码中指定u-blox协议,固件会自动识别GPS并设置波特率为38400;用于APM飞控时,波特率设置成38400/刷新率5hz即可,推荐把输出语句设置成UBX协议。
与328P的MWC连接时,譬如CRIUSMWCSE系列或者其他厂家的同类飞控,需搭配I2C-GPS导航板来使用,可实现定点和动返航功能,详细情况请查阅I2C-GPS导航板页面,
产品参数:
尺寸(mm):
40(宽)×40(长)×9(高);
重量(g):
14(不含线)/16g(含附带连接线);
固定孔孔径(mm):
Φ3.1×4,边缘孔距35mm;
GPS模块:
u-bloxNEO-6M;
EEPROM容量:
32Kbit;
板载接口:
molex1.25mm-4Pin;
板载电池:
SEIKOMS621FE3V可充锂电;
包装内含:
NEO-6GPSv3.0接收机×1;
4Pin连接线(300mm)×1,与飞控连接的插头为4Pin杜邦插头,可方便更换线序,适应不同飞控。
CRIUSI2C-GPSNAV导航板
CRIUSI2C-GPSNAV导航板可让任何基于328P的MWC飞控使用GPS定点、自动返航及自动航点飞行等功能。
★请注意,使用导航板是有条件的,所搭配使用的328P的MWC必须具有磁阻(电子罗盘),最好还要有气压计,
不久的将来,使用升级后的新版GUI可以在地图上指定15个航点(第一点为HOME),MWC飞行器可按照航点路线自动飞行,不过我们不对何时实现该功能作出承诺。
I2C-GPS导航板建议与CRIUSCN-06GPS接收机搭配使用,可使用附带的连接线直接连接,无需修改连接线,使用最方便!
CN-06GPS接收机。
它还可以与任何设置成11520波特率(10Hz)的GPS接收机搭配使用。
GPS接收机-I2C-GPS导航板-飞控三者的连接方式如图
CRIUS蓝牙模块
CRIUS蓝牙模块,采用英国CSR方案的蓝牙从机模块,具有工作稳定性好,信号稳定的优点,自带稳压电源,与MWC的UARTTTL接口可直接对接,方便搭配安卓调参软件来使用。
目前最新版本的MultiWiiConfigurator工具(英文)拥有以下功能:
·读取和修改所有PID参数
·读取和修改AUX1/AUX2的开关设置
·监控遥控器信号及飞控输出的控制信号
·监控陀螺、加速度计、气压计、磁阻等传感器与GPS的输出信号
·校准磁阻与加速度计
·读取和保存MWC的配置参数在手机,以供快速修改成套参数
·屏幕截图
蓝牙模块适用于所有厂家的MWC飞控,与飞控连接时,基于328P的飞控连接UARTTTL串口,Mega飞控则需连接Serial0串口。
蓝牙模块本身提供的是透明数传功能,所以您也可以用于其他设备,作为透传从机来使用。
LED状态指示:
绿色:
电源指示灯,正确通电后常亮;
红色:
闪动表示空闲/常亮表示已连接。
包装内含:
蓝牙模块×1;
4Pin连接线×1,线长约200mm,与飞控连接的插头为4Pin杜邦插头,可方便更换线序,适应不同飞控。
包装内容见下图:
以下为蓝牙模块使用相关视频链接,复制至浏览器地址栏即可打开
蓝牙模块与WM手机配对视频:
蓝牙模块与安卓手机配对视频:
蓝牙模块与单片机(实例为arduino控制器)做无线串口通信视频:
以下资料不提供,请不要以“毕业设计需要”等各种理由索取,不同意请勿购买:
1、纸质说明书和光盘
2、原始设计文件,包括但不限于SCH文件、PCB文件
3、各种单片机端的测试程序
4、其他智能设备(如PDA、PSP、各种品牌手机等)的串口程序
5、除上面已说明可以提供的资料外的其他资料
注意:
产品焊接后不做退换,这是行规,不需要任何解释,如不能接受请购买我们带底板的模块,谢谢!
小常识(非常重要):
TXD:
发送端,一般表示为自己的发送端,正常通信必须接另一个设备的RXD。
RXD:
接收端,一般表示为自己的接收端,正常通信必须接另一个设备的TXD。
正常通信时候本身的TXD永远接设备的RXD!
自收自发:
正常通信时RXD接其他设备的TXD,因此如果要接收自己发送的数据顾名思义,也就是自己接收自己发送的数据,即自身的TXD直接连接到RXD,用来测试本身的发送和接收是否正常,是最快最简单的测试方法,当出现问题时首先做该测试确定是否产品故障。
也称回环测试。
电平逻辑:
TTL电平:
通常数据表示采用二进制,规定+5V等价于逻辑"1",0V等价于逻辑"0",称作TTL信号系统,是正逻辑
RS232电平:
采用-12V到-3V,等价于逻辑"0",+3V到+12V的逻辑电平,等价于逻辑"1",是负逻辑的
产品特性:
1、模块型号为汇承的HC06从模块
2、led引脚指示蓝牙连接状态,输出脉冲表示没有蓝牙连接,输出高表示蓝牙已连接并打开了端口
3、电源电压3.3V,未配对时电流约30mA,配对后约10mA,绝对禁止接反电源!
电源绝对禁止超过3.6V!
4、接口电平3.3V,可以直接连接各种单片机(51,AVR,PIC,ARM,MSP430等),5V单片机也可直接连接,无需MAX232也不能经过MAX232!
5、空旷地有效距离10米,超过10米也是可能的,但不对此距离的连接质量做保证
6、配对以后当全双工串口使用,无需了解任何蓝牙协议,但仅支持8位数据位、1位停止位、无奇偶校验的通信格式,这也是最常用的通信格式,不支持其他格式。
7、在未建立蓝牙连接时支持通过AT指令设置波特率、名称、配对密码,设置的参数掉电保存。
蓝牙连接以后自动切换到透传模式
8、体积小巧(2.7cm*1.3cm),工厂贴片生产,保证贴片质量。
9、该链接为从机,从机能与各种带蓝牙功能的电脑、蓝牙主机、大部分带蓝牙的手机、PDA、PSP等智能终端配对,从机之间不能配对。
产品用途:
配对后只需要当成固定波特率的串口一样使用即可,因此只要是以“固定波特率,8位数据位,无奇偶校验”通信格式的串口设备都可以直接取代原来的有线串口而不需要修改程序。
如数据采集、智能车、串口打印机、户外点阵条屏控制等。
与电脑配对使用:
适合电脑跟设备间通过蓝牙串口通信,使用方法与串口一样
与手机配对使用:
适合手机跟设备间通过蓝牙串口通信,使用方法与串口一样
与蓝牙主机配对使用:
适合两个设备直接通过蓝牙串口通信,如单片机与单片机之间,有线串口跟单片机间等,使用方法与串口一样
变通使用:
波特率变换,因为接收端和发送端可以选择各自的波特率,在数据量小的时候可以作为波特率变换的设备使用。
模块与单片机请遵循以下连接(蓝牙模块电压为3.3V):
以下为蓝牙模块使用相关视频链接,复制至浏览器地址栏即可打开
蓝牙模块与电脑配对视频:
蓝牙模块与WM手机配对视频:
蓝牙模块与安卓手机配对视频:
蓝牙模块与单片机(实例为arduino控制器)做无线串口通信视频:
核心模块手册下载:
厂家的帮助文档:
HC-06-AT指令设置软件(测试版):
上面使用的串口调试工具搜索结果:
CRIUSCO-16OLED显示屏模块
CRIUSCO-16OLED显示屏模块可用于所有MWC飞控,使用I2C接口,使用方便,小巧轻量,可作为固定的机载状态显示屏使用。
CRIUSCO-16OLED显示屏模块依靠MWC固件驱动,拥有以下功能,而且不断在扩展更多功能
◆作为状态显示器
·MWC固件版本,飞行器模式,解锁状态
·可自定义启动LOGO
·遥控器输入信号值
·飞控输出信号值
·陀螺/加速度状态
·信号周期/I2C错误
·GPS数据(貌似在开发中)
·如果有电压/电流传感器,可显示相应数据
◆进入编程模式,可显示及辅助设置参数
·AUX开关功能设置
·PID参数调整
·油门柔和度/曲线调整CRIUSCO-16OLED显示屏模块可用于所有MWC飞控,使用I2C接口,使用方便,小巧轻量,可作为固定的机载状态显示屏使用。
CRIUSCO-16OLED显示屏模块依靠MWC固件驱动,拥有以下功能,而且不断在扩展更多功能
◆作为状态显示器
·MWC固件版本,飞行器模式,解锁状态
·可自定义启动LOGO
·遥控器输入信号值
·飞控输出信号值
·陀螺/加速度状态
·信号周期/I2C错误
·GPS数据(貌似在开发中)
·如果有电压/电流传感器,可显示相应数据
◆进入编程模式,可显示及辅助设置参数
·AUX开关功能设置
·PID参数调整
·油门柔和度/曲线调整
请注意需要预先在MWC固件源代码中设置好相应的选项,才能正常使用CO-16OLED
◆作为状态显示器使用时,可选择自动轮换显示不同页面或者用摇杆组合动作进行手动切换(油门锁定状态下可手动操作切换),详情请查阅MWC固件中的注释信息;
◆进入编程模式需要用摇杆组合动作进入,方法与进入LCD编程模式相同,在锁定状态下,油门保持最低时,同时把升降舵推到最高/方向舵推到最右,然后立刻松开摇杆,就可进入编程模式。
进入后用升降舵选择参数项目,用副翼设置参数/状态。
编程模式可在源代码中选择是否打开AUX设置,以及是否显示AUX3/4设置。
如果需要同时在SE上使用I2C-GPS导航板与CO-16OLED显示屏,请自行改装连接线,并联即可。
产品参数
◆显示颜色:
白色
◆屏幕尺寸:
0.96"
◆长宽(mm):
27×27
◆厚度(mm):
6.5
◆重量(g):
3.7/4.9(包括标配连接线)
◆通讯接口:
I2C5V信号电平
◆插座类型:
Molex1.25mm-4Pin
包装内含
CO-16OLED×1;
4Pin连接线×1,线长约100mm,与飞控连接的插头为4Pin杜邦插头,可方便更换线序,适应不同飞控。
MWC官网中的OLED讨论帖,欢迎参与讨论
-----------------------------------------------------------------------
MWC官方wiki中的OLED代码配置说明:
-----------------------------------------------------------------------
相关链接:
1.MWC程序最新版本,附带对应的GUI设置程序
2.Arduino编辑和上传程序的必备工具
http:
//arduino.cc/en/Main/Software
3.FTDIUSB转TTL工具驱动
4.MWCGUI程序需要JAVA虚拟机支持,可前往JAVA官网下载
5.RCGruop论坛的MWC帖,最新消息及讨论
6.RCGruop论坛关于CRIUSMultiWiiSE的讨论帖,以及新手指南
7.MWC官网,DIY指南、常见问题解答及官方论坛
小常识(非常重要):
TXD:
发送端,一般表示为自己的发送端,正常通信必须接另一个设备的RXD。
RXD:
接收端,一般表示为自己的接收端,正常通信必须接另一个设备的TXD。
正常通信时候本身的TXD永远接设备的RXD!
自收自发:
正常通信时RXD接其他设备的TXD,因此如果要接收自己发送的数据顾名思义,也就是自己接收自己发送的数据,即自身的TXD直接连接到RXD,用来测试本身的发送和接收是否正常,是最快最简单的测试方法,当出现问题时首先做该测试确定是否产品故障。
也称回环测试。
电平逻辑:
TTL电平:
通常数据表示采用二进制,规定+5V等价于逻辑"1",0V等价于逻辑"0",称作TTL信号系统,是正逻辑
RS232电平:
采用-12V到-3V,等价于逻辑"0",+3V到+12V的逻辑电平,等价于逻辑"1",是负逻辑的
产品特性:
1、模块型号为汇承的HC06从模块
2、led引脚指示蓝牙连接状态,输出脉冲表示没有蓝牙连接,输出高表示蓝牙已连接并打开了端口
3、电源电压3.3V,未配对时电流约30mA,配对后约10mA,绝对禁止接反电源!
电源绝对禁止超过3.6V!
4、接口电平3.3V,可以直接连接各种单片机(51,AVR,PIC,ARM,MSP430等),5V单片机也可直接连接,无需MAX232也不能经过MAX232!
5、空旷地有效距离10米,超过10米也是可能的,但不对此距离的连接质量做保证
6、配对以后当全双工串口使用,无需了解任何蓝牙
 升级会员
升级会员 