已知单位反馈系统的开环传递函数为.docx
《已知单位反馈系统的开环传递函数为.docx》由会员分享,可在线阅读,更多相关《已知单位反馈系统的开环传递函数为.docx(12页珍藏版)》请在冰豆网上搜索。
已知单位反馈系统的开环传递函数为
已知单位反馈系统的开环传递函数为
1绪论
(1)控制系统的组成
被控对象
控制系统测量元件
比较元件
控制装置放大元件
执行机构
校正装置
给定元件
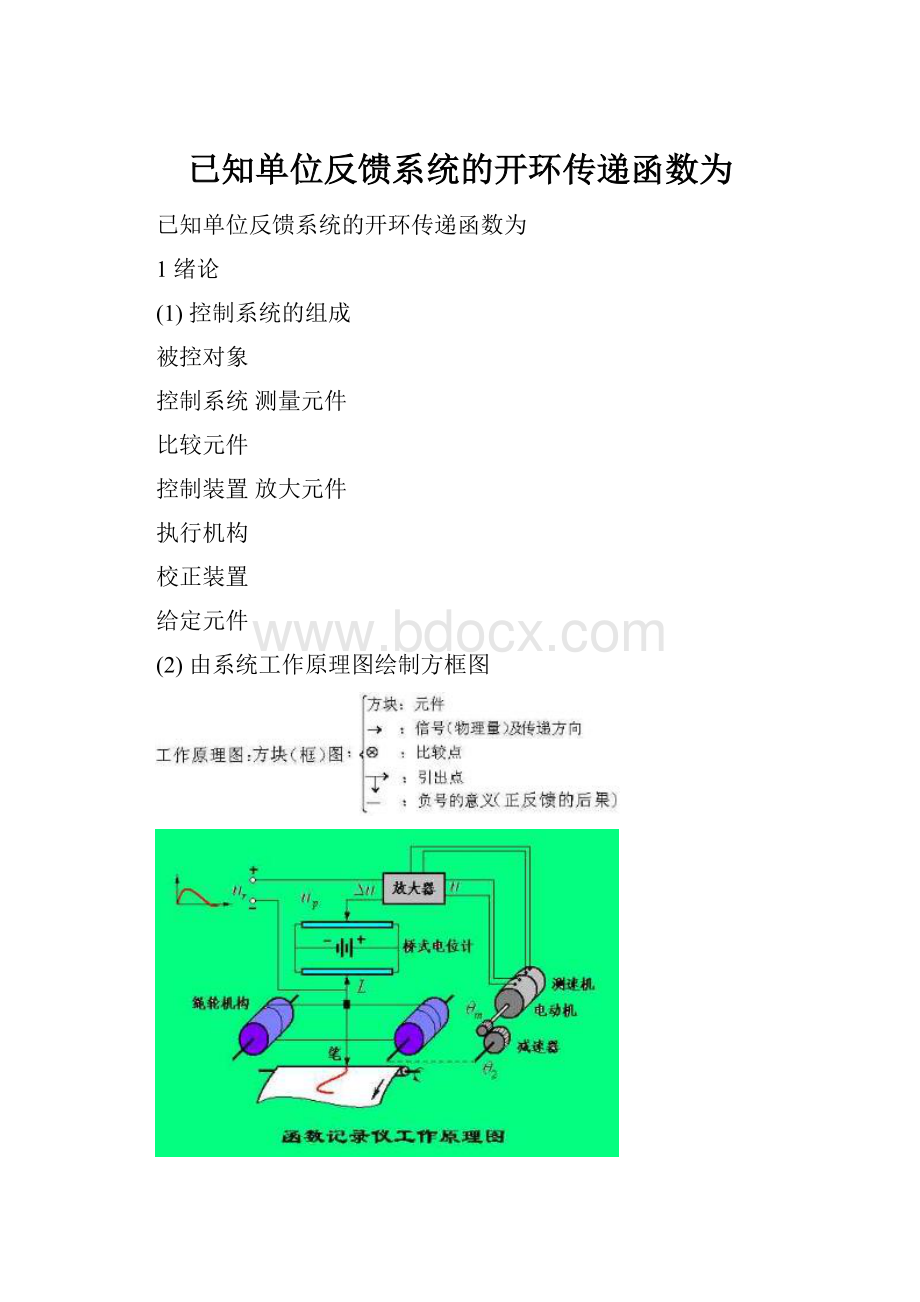
(2)由系统工作原理图绘制方框图
(3)对控制系统的要求
(4)控制系统的分类
(5)负反馈原理
将系统的输出信号引回输入端,与输入信号相比较,利用所得的偏差信号进行控制,达到减小偏差、消除偏差的目的。
2数学模型
时域:
微分方程,
复域:
传递函数,
频域:
频率特性,
x(t)F(t)2-1试建立图2-27所示各系统的微分方程。
其中外力,位移为输入量;位
y(t)f移为输出量;k(弹性系数),(阻尼系数)和(质量)均为常数。
m
解
(a)以平衡状态为基点,对质块进行受力分析(不再考虑重力影响),如图解2-1(a)m
所示。
根据牛顿定理可写出
2dydyF(t),ky(t),f,m2dtdt
整理得
2dy(t)fdy(t)k1,,y(t),F(t)2dtmdtmm
(b)如图解2-1(b)所示,取A,B两点分别进行受力分析。
对A点有
dxdy1kx,x,f,
(1)()()11dtdt
对B点有
dxdy1
(2)f(,),ky2dtdt
联立式
(1)、
(2)可得:
kkkdydx121,y,
dtf(k,k)k,kdt1212
2.1拉氏变换的几个重要定理
(1)线性性质:
L,,af(t),bf(t),aF(s),bF(s)1212
(2)微分定理:
,,,,,,L,,ft,s,Fs,f0,例:
求L,,cos,t
11s,,,?
cost,Lsint,,s,,解:
,2222,,s,,s,,
11,,-1,,(3)积分定理:
,,,,,,Lftdt,,Fs,f0,ss
1,,零初始条件下有:
,,,,Lftdt,,Fs,s
例:
求L[t]=?
,,?
t,1tdt解:
1111?
Lt,L1tdt,,,t,,,,,,,2,,t0ssss
2,,t,例:
求L,,2,,
2t?
tdt解:
2
22,,t111t1?
L,L,,tdt,,,,,,,23,2sss2s,,,t0
(4)位移定理
,s,,,,,,Lft-,,e,Fs实位移定理:
0t,0,
,例:
,,,,ft,10,t,1求Fs,
0t,0,
f(t),1(t),1(t,1)解:
111,s,s,,,,?
Fs,,,e,1,e
sss
at虚位移定理:
(证略),,,,,,Le,ft,Fs-aat,例:
求,,Le
1atatLe,L1t,e,,,,,,,解:
s,a
(5)终值定理(极限确实存在时),,,,,,limft,f,,lims,Fst,,s,0
1f,,,,例:
Fs,求,,,,,,ss,as,b
11flims,,,,,解:
s,0,,,,ssasbab,,
s,2f(t),?
例:
求F(s),2s,4s,3
s,2cc12F(s),,,解:
(s,1)(s,3)s,1s,3
s2121,,,clim(s1),,,,1s,,1(s1)(s3)132,,,,
s2321,,,clim(s3),,,,2s,,3(s1)(s3)312,,,,
1212?
F(s),,s,1s,3
11,t,3t?
f(t),e,e22
ccs,3s,312?
例:
F(s),,,,2(s,1-j)(s,1,j)s,1-js,1,js,2s,2
解1:
s32j,,clim(s1-j),,,1s,,1,j(s1-j)(s1j)2j,,,
s,32-jc,lim(s,1,j),2s,,1-j(s,1-j)(s,1,j),2j
2,j2-j(,1,j)t(,1,j)t?
f(t),e,e2j2j
jt,jtjt,jt1e,ee,e,tjt-jt?
sint,,cost,,,e(2,j)e,(2,j)e()2j2j2j
1,t,t,,,e2cost,4sintj,e(cost,2sint)2j
s,3s,1,2s,12?
F(s),,,,2222(s,1),1(s,1),1(s,1),1(s,1),1
虚位移定理,t,t?
f(t),cost.e,2sint.e
解2:
s,3s,1,2s,11F(s),,,,222222222(s,1),1(s,1),1(s,1),1(s,1),1
t,tf(t),e.cost,2e.sint(复位移定理)
s,2f(t),?
?
例求F(s),2s(s,1)(s,3)
cccc2134F(s),,,,解:
2(s,1)s,1ss,3IVs2121,,,2clim(s1),,,,,22,,s1s(s1)(s3)
(1)(13)2,,,,,IV,,ds2s(s3)(s2)[(s3)s]3,,,,,,2clim(s1)lim,,,,,1,,222,,s,,s11ds4s(s1)(s3)s(s3),,,,,
s22,clims.,,32,s0s(s1)(s3)3,,
s21,clim(s3).,,,42,s-3s(s1)(s3)12,,
11312111?
F(s),,.,.,.,.22(s,1)4s,13s12s,3
1321,t,t,3t?
f(t),,te,e,,e24312
Cs(),例.化简结构图:
求.Rs()
3时域
2,1nG(s),,222ms,Bs,ks,2,,s,,nn
k
,nm
B
,2mk
常见的性能指标有:
上升时间tr、峰值时间tp、调整时间ts、
最大超调量Mp、振荡次数N。
c(t)
允许误差
M
p1
0.9
,=0.05或0.02
0.1
ttt0rpst
欠阻尼二阶系统的阶跃响应为:
2t,,,n,1,e,21,,c(t),1,sin(1,t,tg),t,0n2,,1,
上升时间
2,1,,,arctg,,,,arccos,,tr22,1,,,1,,nn
峰值时间
tp2,1,,n
最大超调量
(ct),(c,)p
M,,100%p
(c,)
2,,,1,,,e,100%
调整时间ts
4,,,,0.02,,,,2,ln,,ln1,,n,,,ts3,,,,,,0.05n,,,,n
已知系统传递函数:
2s,1
G(s),2(s,1)
求系统的单位阶跃响应和单位脉冲响应。
解:
1)单位阶跃输入时
2s,1111C(s),G(s)R(s),,,,22ss,1s(s,1)(s,1)
t,tc(t),L[C(s)],1,te,e
2)单位脉冲输入时,由于
d
(t),[1(t)]
dt
d,t,tc(t),c(t),2e,te
dt
3.1
单位反馈系统的开环传递函数为
25G(s),s(s,5)
2求各静态误差系数和时的稳态误差;er(t),1,2t,0.5tss
K,5,25G(s),解1,s(s,5)v,1,
25KlimG(s)lim,,,,ps,0s,0s(s5),
25KsGs,lim(),lim,5vs,0s,0s,5
s252KsGs,lim(),lim,0as,0s,0s,5
1,,0e时,r(t),1(t)1ss11,Kp
A2e,,,0.4时,r(t),2t2ss2K5v
A12e,,,,时,r(t),0.5tss33K0a
由叠加原理e,e,e,e,,ssss1ss2ss3
解2:
111代入R(s),,2,,0.523sss
3.2
已知单位反馈系统的开环传递函数为
7(s,1)G(s),2s(s,4)(s,2s,2)
2tr(t),1(t),t试分别求出当输入信号和时系统的稳态误差
e(t),r(t),c(t)[]。
K,78,7(s,1)G(s),解1:
2s(s,4)(s,2s,2)v,1,由静态误差系数法
r(t),1(t)时,e,0ss
A8r(t),t时,e,,,1.14ssK7
2时,e,,r(t),tss
解2:
sR(s)
e,lime(t),limsE(s),limss
t,,s,0s,01,G(s)H(s)
111R(s)分别为、、23sss
代入计算
C(s)R(s)E(s)
G(s)
B(s)
H(s)
E(s)1
R(s)1,G(s)H(s)误差传递函数C(s)G(s)
闭环传递函数R(s)1,G(s)H(s)
B(s)
开环传递函数,G(s)H(s)
E(s)
稳态误差
sR(s)e,lime(t),limsE(s),limss
t,,s,0s,01,G(s)H(s)
静态位置误差即单位阶跃输入下的稳态误差
1
R(s),s
sR(s)1e,lim,limsss,0s,01,G(s)H(s)1,G(s)H(s)静态速度误差即单位速度输入下的稳态误差
1R(s),21ss,2sR(s)1selimlimlim,,,sss,0s,0s,01G(s)H(s)1G(s)H(s)sG(s)H(s),,
静态加速度误差即单位加速度输入下的稳态误差
1R(s),31ss,3sR(s)1selimlimlim,,,ss2s,s,s,1G(s)H(s)1G(s)H(s)000sG(s)H(s),,
静态位置误差系数K,G(s)H(s),G(0)H(0)plims,0静态速度误差系数K,sG(s)H(s)vlims,0
2静态加速度误差系数K,sG(s)H(s)alim,s0
3.3
某典型二阶系统的单位阶跃响应如图所示。
试确定系统的闭环传递函数。
图
解依题,系统闭环传递函数形式应为
2K,.nG(s),22s,2,,s,,nn由阶跃响应曲线有:
1h(,),limsG(s)R(s),lims,(s),,K,2s,0s,0s
,,,t2p,2,,1,,n,2,2.52,,,,1,,o,,,Me25po,,2
0.404,,
联立求解得,1.717,n,
22,1.7175.9G(s),,所以有222s,2,0.404,1.717s,1.717s,1.39s,2.95
3.4
如图所示系统,假设该系统在单位阶跃响应中的超调量M=25%,峰值时间=0.5秒,试t0m确定K和τ的值。
解:
系统结构图可得闭环传递函数为
Y(s)KKG(s),,,B2X(s)s(s,1),K,(s,1)s,(1,K,)s,K
2,n与二阶系统传递函数标准形式相比较,可得22s,2,,s,,nn
,2,1n2,,,,,KK,;2,1,或,nn2,n
,,21,,M,e,100%,25%0
,,21,,即e,0.25
两边取自然对数可得
,,,ln0.25,,1.38632,1,
1.3863,,,0.422,,1.3863
依据给定的峰值时间:
t,,0.5(秒)p2,,1,n
,所以(弧度/秒),,6.85n2,0.51,故可得
2K,,,46.95,47n
τ?
0.1
4稳定性
 升级会员
升级会员 