小车 轨迹 c51.docx
《小车 轨迹 c51.docx》由会员分享,可在线阅读,更多相关《小车 轨迹 c51.docx(8页珍藏版)》请在冰豆网上搜索。
小车轨迹c51
硬件设计
文介绍了采用红外反射式传感器的自寻迹小车的设计与现。
采用与白色地面色差很大的黑色路线引导小车按照既定路线前进。
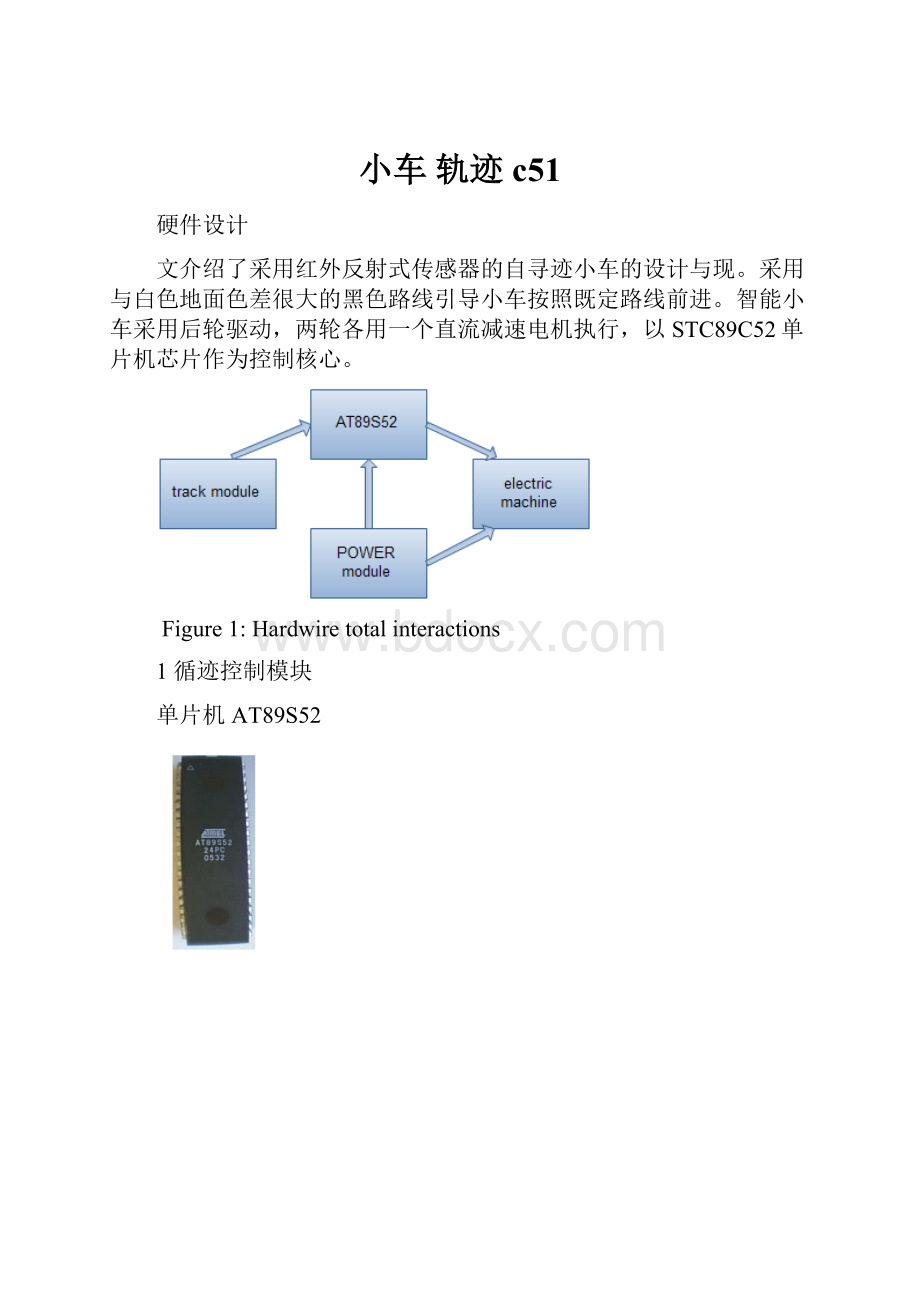
智能小车采用后轮驱动,两轮各用一个直流减速电机执行,以STC89C52单片机芯片作为控制核心。
Figure1:
Hardwiretotalinteractions
1循迹控制模块
单片机AT89S52
2循迹传感器模块
Figure2:
ST188DistributionPlan
反射式红外发射接收管
采用4个红外传感器并列在一条直线上,中间的2个红外传感器一直在黑线范围内,外面的2个红外传感器一直在黑线范围外,如Figure2所示.
当红外传感器在黑线范围内,反射接收到的是高电平,在黑线范围外反射接收到的是低电平.CPU接收到的信号与控制电机的动作如Table1所示.
Table1
leftsensor1
leftsebsor2
rightsensor1
rightsensor2
leftelemachine
rightelemachine
0
1
1
0
forwardturning
forwardturning
1
1
0
0
stop
forwardturning
0
0
1
1
forwardturning
stop
1
1
1
1
forwardturning
backwardturning
0
0
0
0
forwardturning
forwardturning
C
探测路面黑线原理:
在小车头部并排安装4对红外对管(型号为STl88),接LM324四路集成运放电路,输出TTL电平,与路面距离控制在8mm左右,红外发射管发射光线到路面,红外光如遇到白底则被反射,接收管接收到反射光,经运放电路向单片机I/O口输出低电平0;反之,当红外光遇到黑线被吸收,接收管没有接收到反射光,向单片机I/0口输出高电平l(如图3所示)。
元件:
采用反射式红外光电传感器STl88。
原理:
由于光线照到路面产生反射,且黑色与白色反射系数不同,可以根据传感器接收到的光判断车是否超出黑线。
STl88电路检测到黑色或白色的时候可以产生高低电平信号的变化,并将信号送至单片机,从而控制左右电机转动,实现小车沿黑线运动。
STl88原理:
一体化红外发射接收IRT中的发射二极管导通,
发出红外光线反射到光敏接收管上,使光敏接收管的集电极发射极问电阻变小,输入端电平变低,输出端为高电平,9013导通,集电极为低电平,输入单片机。
当检测到黑色条纹时,反射到IRT中接收管上的光减少.接收管的集电极与发射极问电阻变大,9013截止,集电极C为高电平,将此信号输入到单片机中进行判断。
根据实际情况,我们做了如下的改进:
(1)在发光■极管的正
极部分,接入可调电位器,可以通过对该端电压的控制来调节传感器的敏感度;
(2)在电路的输出端再加一个施密特电路整形:
(3)在三极管的基集B和发射极E接一个电容,减少电路中的“毛刺”,增加其抗干扰能力。
2传感器分布方案
传感器通过信号采集,向MCU提供信息,所以合理的传感器布局能使在相同传感器下,获取的信息量最大。
尤其在快速行进的小车中,通常传感器布局需要考虑信息检测的准确度和信息检测的前瞻性。
目前许多小车控制传感器的布局采用等间隔的一字排布,非常不科学,传感器的科学布局一般有以下几种:
方案一:
一字型布局
一字型布局即所有传感器在同一直线上。
一字型布局又分为均匀排布型与非均匀排布型。
均匀排布型不利于对弯道信号采集的准确性。
考虑到弧度信息采集的连贯性,非均匀排布择采用等角原则,即在直线垂直上方处某点等角的引射线与直线的交点即传感器的分布点,此种方法检测连贯简单,程序控制算法简单,使小车控制稳定。
如图2为非均匀对称分布.按等角原则的分布图。
方案二:
M型布局
M型布局即传感器的布局成M型,M型更适合在快速弯道时对弯道的检测。
由于传感器不在同一直线上,故转弯的时候边侧后部的传感器有较大的采样空间,内部前端的传感器则对信号采集有更好的前瞻性,M型中间底部的传感器择更好的确定小车的位置。
整个布局有利于在弯道处提高小车速度。
但相对一字型布局,M型布局容易产生不稳定信号采集,从而产生信号震荡,影响小车行驶的稳定性。
3电机模块
直流电机:
●左右两轮各装一个电机进行驱动
●采用PWM调速:
由单片机两个管脚输出一系列频率固定的方波,通过功率放大驱动电机。
软件在程序中改变方波的占空比来改变加到电机上的平均电压,从而改变电机的转速。
后轮两个电机的转速配合实现小车的前进,倒退,转弯。
4电机驱动模块
L293D可驱动2个电机,3,6和11、14脚之间分别接2个电动机。
2、7、lO、15脚接输入控制电平,控制电机的正反转,ENA、ENB接控制使能端,控制电机停转。
单片机输出2组PWM波,每1组PWM波用来控制1个电机的速度。
另外2个I/O口可以控制电机的正反转。
控制方法与控制电路都比较简单。
即2、7脚控制第1个电机的方向,输入的ENA控制第1个电机光电对管电压比较器LM393的速度;lO、15脚控制第2个电机的方向,输入的ENB控制第2个电机的速度。
C
5电源
电源模块分为2部分:
一部分为芯片电源模块。
提供5V电压
驱动芯片:
另一部分为电机驱动模块,提供较高的功率通过L293D
来驱动电机。
电机驱动电源:
由于小车自带5v的直流充电电池,用该电池提供电源给293芯片,一般该电池为400mAh的镍电池,功率大,比较稳定耐用,可充电更加经济,H稳定性较好,使用更为方便。
芯片驱动电源:
由于功率要求不大,但是稳定性要高,所以用
6V的稳压电路带动(已经考虑了压降,当然每个电子器件的压降
不同,需要根据自己的电路,做调试)。
6软件设计
软件部分主要完成信号的检测和处理、直流电机的控制等功能。
四组红外对管并排安装在小车头部下方,中间2个为l级方向控制,外围2个为2级方向控制。
如果SENSORI或者SENSOR2探测到黑线,即车体左半部分压到黑线,应控制小车向左转,如果SENSOR3或者SENSOR4探测到黑线,即车体右半部分压到黑线,应控制小车向右转,经过方向调整后,小车再继续前进,并不停的探测黑线重复上述动作
 升级会员
升级会员 