上海海事大学可编程控制器考试试题示例.docx
《上海海事大学可编程控制器考试试题示例.docx》由会员分享,可在线阅读,更多相关《上海海事大学可编程控制器考试试题示例.docx(29页珍藏版)》请在冰豆网上搜索。
上海海事大学可编程控制器考试试题示例
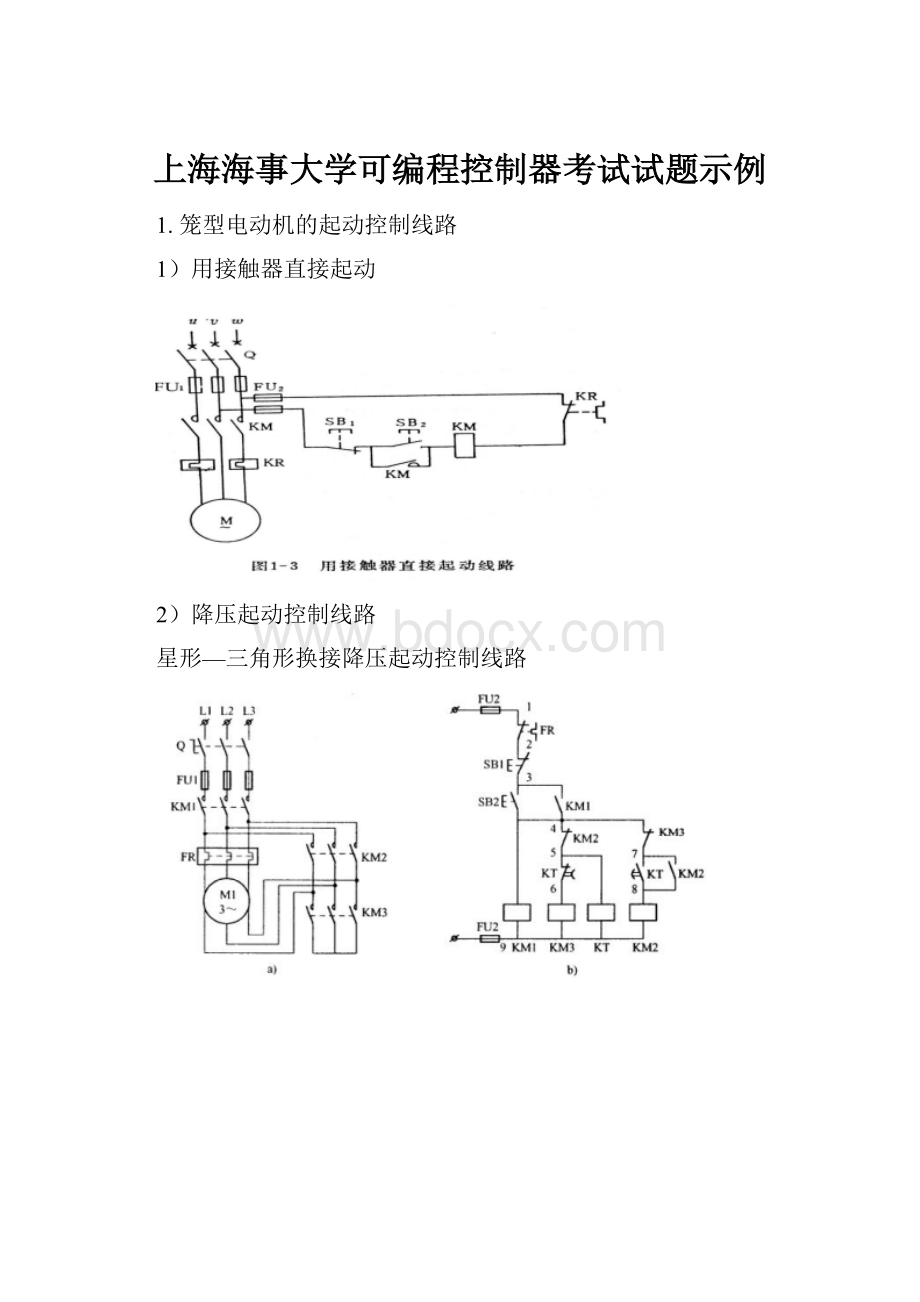
1.笼型电动机的起动控制线路
1)用接触器直接起动
2)降压起动控制线路
星形—三角形换接降压起动控制线路
PLC实现
定子串电阻降压起动控制线路
时间原则控制:
以时间作为控制的变化参量,主要采用时间继电器进行控制的方法称为时间原则控制。
例如,定子绕组串电阻降压起动控制电路。
如图3-15所示,主电路由接触器KM1、KM2主触点构成串电阻接线和短接电阻接线,并由时间继电器KT实现从起动到正常工作状态的切换。
按下起动按钮SB2,接触器KM1线圈得电,电动机串电阻降压起动。
同时,时间继电器KT线圈得电,经过一定时间,其延时闭合动合触点闭合,KM2线圈得电,KM1、KT线圈断电。
KM2主触点闭合,电阻短接,电动机全压运行。
时间原则控制多用于难以直接检测变化参量的自动控制中,而且时间继电器的通用性好,控制灵活方便,因而能代替某些原则控制。
3)电动机正反转线路
如图3-11所示,SB为停止按钮,SB1为正向起动按钮,SB2为反向起动按钮。
在正向接触器KM1线圈的电路中,串入反向接触器KM2的常闭触点,实现正反向接触器间的联锁(互锁)。
如果希望不用按下停止按钮SB,直接按下反向按钮SB2即可实现电动机反向工作,SB1、SB2可以采用复合按钮(如图3-12)或转换开关。
电动机正反转PLC控制:
4)正反转自动循环线路
行程控制原理:
限位开关SQ1放在左端需要反向的位置,SQ2放在右端需要反向的位置,机械挡铁装在运动部件上。
正向运动时,按正转按钮SB2,KM1通电自锁,电动机正向旋转,带动工作台左移。
压下SQ1,其常闭触点断开,切断KM1的线圈电路。
同时,SQ1的常开触点闭合,接通KM2的线圈电路,电动机反转,带动工作台右移,压下SQ2,工作台实现左右移动的自动控制。
限位开关SQ3、SQ4分别起到左右超限位保护作用,当工作台移动到左右的极限位置时动作。
注意:
运动部件经过一次自动往复循环,电动机要进行两次反接制动过程,易出现较大的反接制动电流和机械冲击。
因此,这种电路只适用于电动机容量较小,循环周期较长,电动机转轴具有足够刚性的拖动系统中。
在选择接触器容量时,应比一般情况下选择的容量大一些。
5)多电机顺序启动
以车床主轴为例,主电路如图3-13a所示,主轴拖动电动机M1,润滑油泵电动机M2。
控制电路如图3-13b所示,KM2的常开触点串入KM1的线圈电路中,实现先KM2通电、后KM1通电的顺序动作。
起动时,同时按下按钮SB2、SB4,油泵先给齿轮箱供油润滑,KM2的常开触点闭合,然后才允许主轴拖动电动机起动。
PLC实现:
如图所示。
Y0的常开触点串在Y1的控制回路中,Y1的接通是以Y0的接通为条件。
这样,只有Y0接通才允许Y1接通。
Y0关断后Y1也被关断停止,而且Y0接通条件下,Y1可以自行接通和停止。
X0、X2为起动按钮,X1、X3为停止按钮。
6)多地点控制
如图3-18所示,进行两地控制,应当有两组按钮,其线路设计的普遍规则是:
各个操作地点的起动按钮(常开触点)并联,即逻辑“或”的关系;停车按钮(常闭按钮)串联,即逻辑“与非”的关系。
多地控制电路PLC实现:
下图是两个地方控制一个继电器线圈的程序。
其中X0和X1是一个地方的起动和停止控制按钮,X2和X3是另一个地方的起动和停止控制按钮。
两台交流异步电动机,一台启动10s后第二台启动,停车时两台同时停止。
欲实现这一功能。
给两台电机供电的两只交流接触器要占用PLC的两个输出口(Y0及Y2)。
由于是两台电机联合启停,仅选一只启动按钮(X0)和一只停止按钮(X2),但延时功能需一只定时器(T1)。
线路中的保护措施
在电气控制线路中,常用的保护措施有:
短路电流保护,过电流保护,热保护,零电压、欠电压保护,弱磁保护及超速保护等。
1.
短路保护
(1)熔断器保护
(2)过电流继电器保护或断路器保护
2.过电流保护
3.热保护
4.零电压和欠电压保护
5.其他保护措施
(1)弱磁场保护
(2)超速保护
6.电动机的常用保护举例
如图3-19,快速熔断器FU、熔断器FU1为短路保护;热继电器KR为过电流保护;欠电压继电器KV为欠电压保护;热继电器KR为热保护;KM1、KM2的常闭触点为联锁保护。
横梁控制线路设计:
根据横梁升降机构的工艺要求,在控制电路中应用了多个典型线路设计基本规律:
1.点动控制例如,上升运动为调整运动,并且是手动控制,因此采用点动控制。
下降运动也是如此。
2.正反转控制例如,上升、下降,夹紧、放松是方向相反的两对运动,因此要求电动机M1、M2可以实现正反转控制。
3.自锁环节例如,放松接触器KM3线圈电路中的KM3常开触点,为防止在放松过程中按钮SB1松开,加入KM3的自锁触点。
4.正反向接触器的联锁控制例如,图3-24b中的KM1、KM2的常闭触点。
5.顺序起动控制例如,时间继电器KT和下降继电器KM2的动作顺序为下降动作结束时,时间继电器动作。
因此,将KM2的常开触点加入到KT线圈的控制电路中。
6.行程原则控制例如,限位开关SQ1、SQ2、SQ3,分别实现放松、上升、下降的极限位置控制。
7.时间原则控制例如,时间继电器KT控制回升运动。
8.电流原则控制例如,夹紧力大小的控制。
将以上基本环节根据控制要求组合起来,先设计能够基本满足工艺要求的电路,经过反复修改和试验,使电路符合设计要求,并增加保护环节。
这种方法常为工程设计人员采用,但设计的电路触点不一定最少,也不一定是最优方案。
可编程逻辑控制器部分:
一、PLC的结构组成
PLC是一种以微处理器为核心,综合了计算机技术、半导体存储技术和自动控制技术的一种工业控制专用计算机,其结构组成与微机基本相同,包括以下几部分:
中央处理单元(CPU)、存储器、输入输出(I/O)部件、电源部件和外部设备,如图5-1所示。
图5-1PLC结构组成
二、PLC的工作方式
PLC与其它计算机一样,其功能还必须由软件支持,软件包括系统软件和应用软件。
PLC的工作方式是在其系统软件的控制和指挥下,对应用软件(用户程序)作周期性的循环扫描工作。
每一循环称为一个扫描周期,每一个扫描周期分为输入采样、执行程序、输出刷新和通讯四个阶段。
1.输入采样阶段
PLC在采样阶段以扫描方式顺序读入所有输入的状态,并存入输入数据寄存器中。
接着转入执行阶段。
在程序执行期间,即使输入状态变化,输入数据寄存器的内容也不会改变。
这些变化只能在下一个扫描周期输入采样时读入。
2.程序执行阶段
在程序执行阶段,先从输入数据寄存器中读入所有输入的状态。
指令的执行总是根据梯形图的顺序先左后右、先上后下地对每条指令进行扫描,并按程序中规定读入某个输出、内部辅助继电器、定时器、计数器的状态。
然后,进行逻辑运算。
运算结果存入输出数据寄存器。
3.输出刷新阶段
在所有指令执行完以后,输出数据寄存器中的数据不再发生变化,输出数据寄存器中所有输出继电器的状态,在输出刷新阶段转存到输出锁存电路,并驱动输出电路。
这才是PLC的实际输出。
4.通讯
输出刷新过后,PLC进入与编程器和上位机或下位机通讯(如果有通讯请求)。
在与编程器通讯过程中,编程器把编程和修改的参数发送给主机,主机把要显示的状态、数据、错误码等发送给编程器进行相应显示。
编程器还要发送给主机停机、启动、清内存等命令。
以上四个阶段构成了PLC执行用户程序的一个工作周期。
在PLC内部设置了监视定时器,对每个扫描周期进行监视,以免由于CPU内部故障使系统进入死循环。
三、PLC的编程语言
1.顺序功能表图(SFC)
2.梯形图(LD)3.指令表(IL)等
四、PLC与继电接触器控制系统的比较
在PLC出现之前,逻辑控制和顺序控制都是由传统的继电接触器控制系统来实现的。
由于采用了微控制器和计算机技术,PLC与传统的继电接触器系统相比具有许多优点:
1.传统的继电器控制系统是针对一定的生产机械、固定的生产工艺而设计,采用硬接线方式安装而成,只能进行开关量的控制;而PLC采用软件编程来实现各种控制功能,只要改变程序,就可适应生产工艺的改变,并且可以实现开关量和模拟量的控制,因而适应性强。
2.传统的继电接触器控制系统中,随着控制对象的增多,必然要增加继电器数目,提高系统的运营成本;而对于PLC来说,只需要改变程序就可以实现较复杂的控制功能。
3.继电接触器控制系统在长期使用的过程中,受接触不良和触点寿命的影响,可靠性低;PLC由于采用了微电子和计算机技术,可靠性比较高,抗干扰能力强。
4.继电接触器控制系统要扩充、改装都必须重新设计重新配置;而PLC在I/O点数及内存容许范围内,可自由扩充。
5.与传统继电接触器控制系统相比,PLC体积小,重量轻,结构紧凑,开发周期短,安装和维护工作量小,PLC还有完善的监控和自诊断功能,可以及时发现和排除故障。
LDX0
ORX1
LDIX2
ORX3
ANB
OUTM0
LDX0
ANDX1
LDX2
ANIX3
ORB
OUTM1
因此,PLC在性能上比继电接触器逻辑控制优异,在用微电子技术改造传统产业的过程中,传统的继电接触器控制系统,大多数将被PLC控制系统所取代。
梯形图到指令语句表:
1)2)
LDX1
ORX2
ORIM105
OUTY1
LDX3
ORM100
ANIX4
ORIM100
OUTM100
MPP
ANDX4
MPS
ANDX5
OUTY2
MPP
ANDX6
OUTY3
LDX0
MPS
ANDX1
MPS
ANDX2
OUTY0
MPP
ANDX3
OUTY1
3)
时序图到梯形图:
1)
编程实现按钮X0按一下,Y0输出如下图脉冲波形
用SET,RST指令如何实现?
2)
啤酒生产线中有一个环节是对成品进行装箱,假设每12瓶装为一箱,思考如何实现。
3)多个定时器组合电路
如图所示。
当X0接通,T0线圈得电并开始延时,延时到T0常开触点闭合,又使T1线圈得电,并开始延时,当定时器T1延时到,其常开触点闭合,再使T2线圈得电,并开始延时,当定时器T2延时到,其常开触点闭合,才使Y0接通。
因此,从X0为ON开始到Y0接通共延时9000s。
4)定时器和计数器组合
当X1为ON时,T1开始定时,0.6s后T1定时时间到,其常闭触点断开,使它自己复位,复位后T1的当前值变为0,同时它的常闭触点接通,使它自己的线圈重新通电,又开始定时。
T1将这样周而复始地工作,直至X1变为OFF。
从分析中可看出,1最上面一行电路是一个脉冲信号发生器,脉冲周期等于T1的设定值。
产生的脉冲列送给C0计数,计满3个数后,C0的当前值等于设定值,它的常开触点闭合,Y0开始输出。
5)二分频电路
N分频电路
(可参考,为
原创,有可能
错误)
1.集中与分散控制电路:
在多台单机组成的自动线上,有在总操作台上的集中控制和在单机操作台上分散控制的联锁。
集中与分散控制的梯形图如图所示。
X2为选择开关,以其触点为集中控制与分散控制的联锁触点。
当X2为ON时,为单机分散起动控制;当X2为OFF时,为集中总起动控制。
在两种情况下,单机和总操作台都可以发出停止命令。
2.闪烁电路
当拨动开关将X0接通,启动脉冲发生器。
延时2s后Y0接通,再延时3s后Y0断开。
这一过程周期性地重复。
Y0输出一系列脉冲信号,其周期为5s,脉宽为3s。
2.延合延分电路:
如图所示用X0控制Y0,当X0的常开触点接通后,T0开始定时,10s后T0的常开触点接通,使Y0变为ON。
X0为ON时其常闭触点断开,使T1复位,X0变为OFF后T1开始定时,5s后T1的常闭触点断开,使Y0变为OFF,T1也被复位。
Y0用起动、保持、停止电路来控制。
状态指令编程题1:
状态指令编程题2:
状态指令编程题3:
根据十字路口交通信号灯的控制要求,可作出信号灯的控制时序图如图所示。
状态转移图:
状态转移步进梯形图:
并行分支与汇合流程的编程应用
 升级会员
升级会员 