华南理工第一学期自动控制原理平时作业.doc
《华南理工第一学期自动控制原理平时作业.doc》由会员分享,可在线阅读,更多相关《华南理工第一学期自动控制原理平时作业.doc(8页珍藏版)》请在冰豆网上搜索。
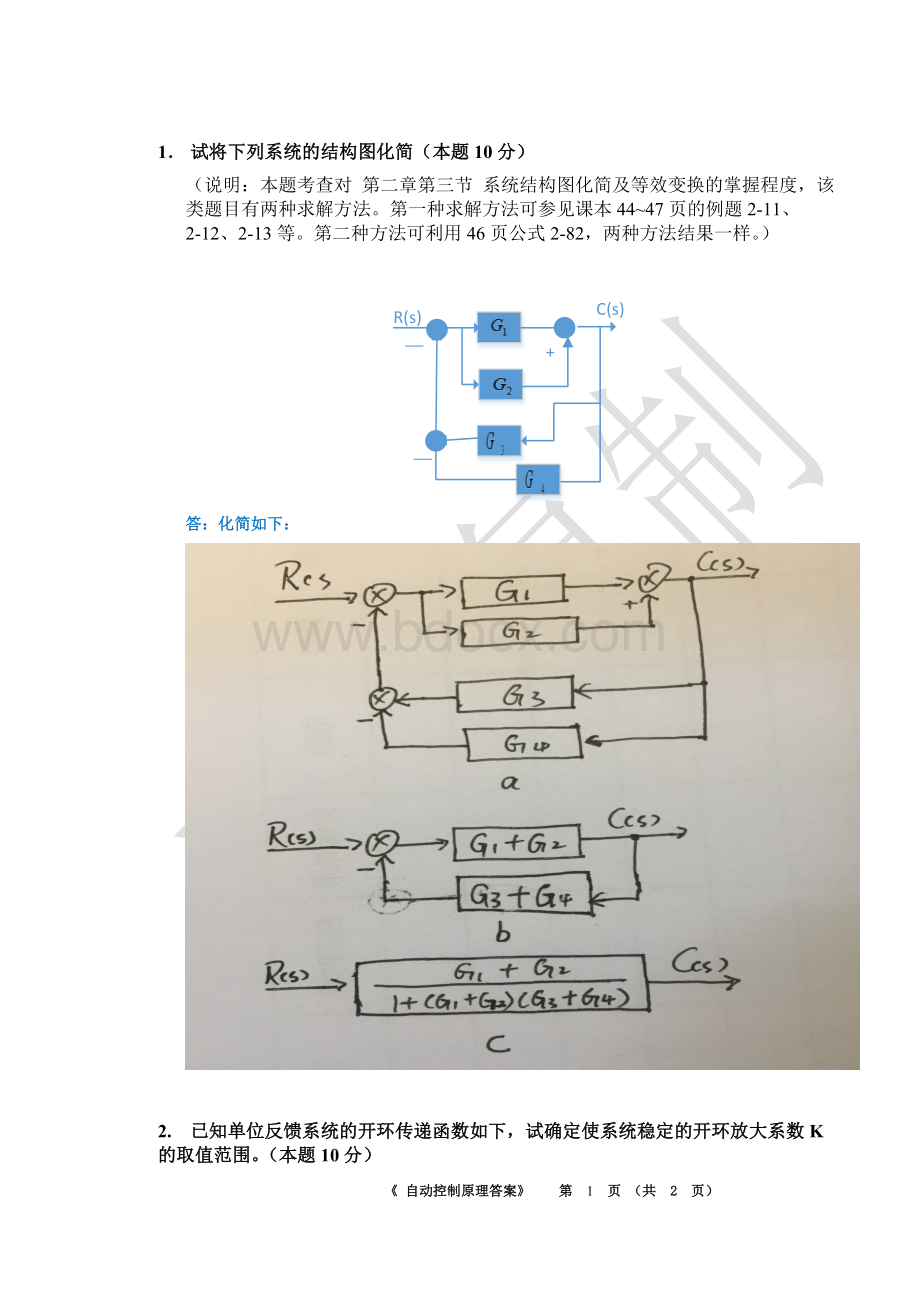
1.试将下列系统的结构图化简(本题10分)
(说明:
本题考查对第二章第三节系统结构图化简及等效变换的掌握程度,该类题目有两种求解方法。
第一种求解方法可参见课本44~47页的例题2-11、2-12、2-13等。
第二种方法可利用46页公式2-82,两种方法结果一样。
)
答:
化简如下:
2. 已知单位反馈系统的开环传递函数如下,试确定使系统稳定的开环放大系数K的取值范围。
(本题10分)
(说明:
本题考查对第三章第一节劳斯稳定判据的理解和应用,可参见课本67页例题3-6。
一样的求解思路)
3.已知单位负反馈系统开环传递函数。
(本题20分)
1)试判断该系统属于几型系统。
2)系统的开环放大系数K是多少?
3)试判断该系统是否稳定。
4)试求在输入信号作用下,系统的稳态误差是多少。
(说明:
本题考查对第三章第六节稳态误差相关知识的理解和计算。
可参见课本105页表3-6的总结及例题3-16。
)
答:
(1)由系统开环函数可知系统为Ⅰ型系统
(2)由G(s)=
可知向前积分环节有一个,系统是Ⅰ型系统,且开环放大系数K=2.5。
4.某二阶系统的结构图如图(a)所示,该系统的单位阶跃响应如图(b)所示。
(本题20分)
1)试计算该系统的性能指标:
稳态值、超调量;
2)试确定系统参数K1,K2和a。
答:
1)由系统的单位阶跃响应曲线(图b)可以得出
2)由图a可知系统闭环传递函数:
(A)
由联立解得
将以上参数代入式(A)可得
又因为
最后得出系统参数k1=1108,k2=3,a=22
5.已知某系统的开环传递函数为:
(本题10分)
1)试求解系统的转折频率;低频渐近线斜率等参数;
2)绘制系统的对数幅频特性图;要求标明转折频率及斜率,幅值等必要数据。
(说明:
本题考查对第五章第四节系统开环频率特性的绘制要点,可参见课本213~215页,对绘制步骤有详细的说明,绘制要点是确定低频渐近线斜率、转折频率、及转折后斜率的变化量。
可参看例题5-3。
一样的求解思路)
答:
1)将传递函数变形为
其对应的频率特性表达式
得转折频率为ω1=1、ω2=1/0.25=4,放大系数K=100,
由ν=0,故低频渐进线的斜率K=0dB/dec
2)系统的对数幅频特性图如下:
因在ω1=1处,由低频渐进线L(ω)=20lgK=20lg100=40(Db)
6.试绘制下列两幅图的根轨迹。
(本题10分)
(说明:
本题考查对第四章第二节系统根轨迹的绘制要点的理解,可参见课本141~159页的内容。
)
答:
(a)
(b)
7.某单位反馈系统的开环传递函数为,其奈奎斯特图如图所示,试利用奈奎斯特稳定判据判断该系统的稳定性。
(本题10分)
(说明:
本题考查对第四章第二节系统根轨迹的绘制要点的理解,可参见课本141~159页的内容。
)
答:
系统稳定性:
Z=P–2(N+–N-)=0–2(0–1)=2
系统为发散不稳定系统
8.简答题(本题10分)
1)闭环控制系统中主要包括哪些基本环节,并简述主要环节的作用。
答:
闭环控制系统(自动控制系统)通常是由测量反馈元件、比较元件、放大元件、校正元件、执行元件、控制对象等基本环节组成。
作用:
测量反馈元件:
用以测量被控制量并将其转换成与输入量同一物理量后,再反馈到输入端以作比较。
比较元件:
用来比较输入信号与反馈信号,并产生反映两者差值的偏差信号。
放大元件:
将微弱的信号作线性放大。
校正元件:
按某种函数规律变换控制信号,以利于改变系统的动态品质或静态性能。
执行元件:
根据偏差信号的性质执行相应的控制作用,以便使被控制量按期望值变化。
控制对象:
又称被控或受控对象,通常是指生产过程中需要进行控制的工作机械或生产过程,出现于被控对象中需要控制的物理量称为被控量。
2)对控制系统采用频率法校正时,一般采用串联超前校正或串联滞后校正,请简述各自的概念及特点,两种校正分别对系统有何作用。
答:
①串联超前校正概念:
利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目的。
为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)处。
通过所加校正装置,改变系统开环频率特性的形状,使校正后系统的开环频率特性具有如下特点:
低频段:
用以满足稳态精度的要求;
中频段:
幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是为了系统具有满意的动态性能;
高频段:
要求幅值迅速衰减,以较少噪声的影响。
②串联滞后校正:
利用滞后网络或PI控制器的高频衰减特性,是已校正系统截止频率下降,从而获得足够的相角裕度,以提高系统的稳定性。
a)超前校正:
优点:
加快系统响应速度;提高系统相对稳定性。
缺点;问题精度变化不大。
b)滞后校正;优点:
提高系统稳态精度;提高系统相对稳定性。
缺点:
降低系统响应速度。
《自动控制原理答案》第8页(共2页)
 升级会员
升级会员 