0iMBMC 伺服参数调整.docx
《0iMBMC 伺服参数调整.docx》由会员分享,可在线阅读,更多相关《0iMBMC 伺服参数调整.docx(13页珍藏版)》请在冰豆网上搜索。
0iMBMC伺服参数调整
0i-MB/C伺服参数调整-2
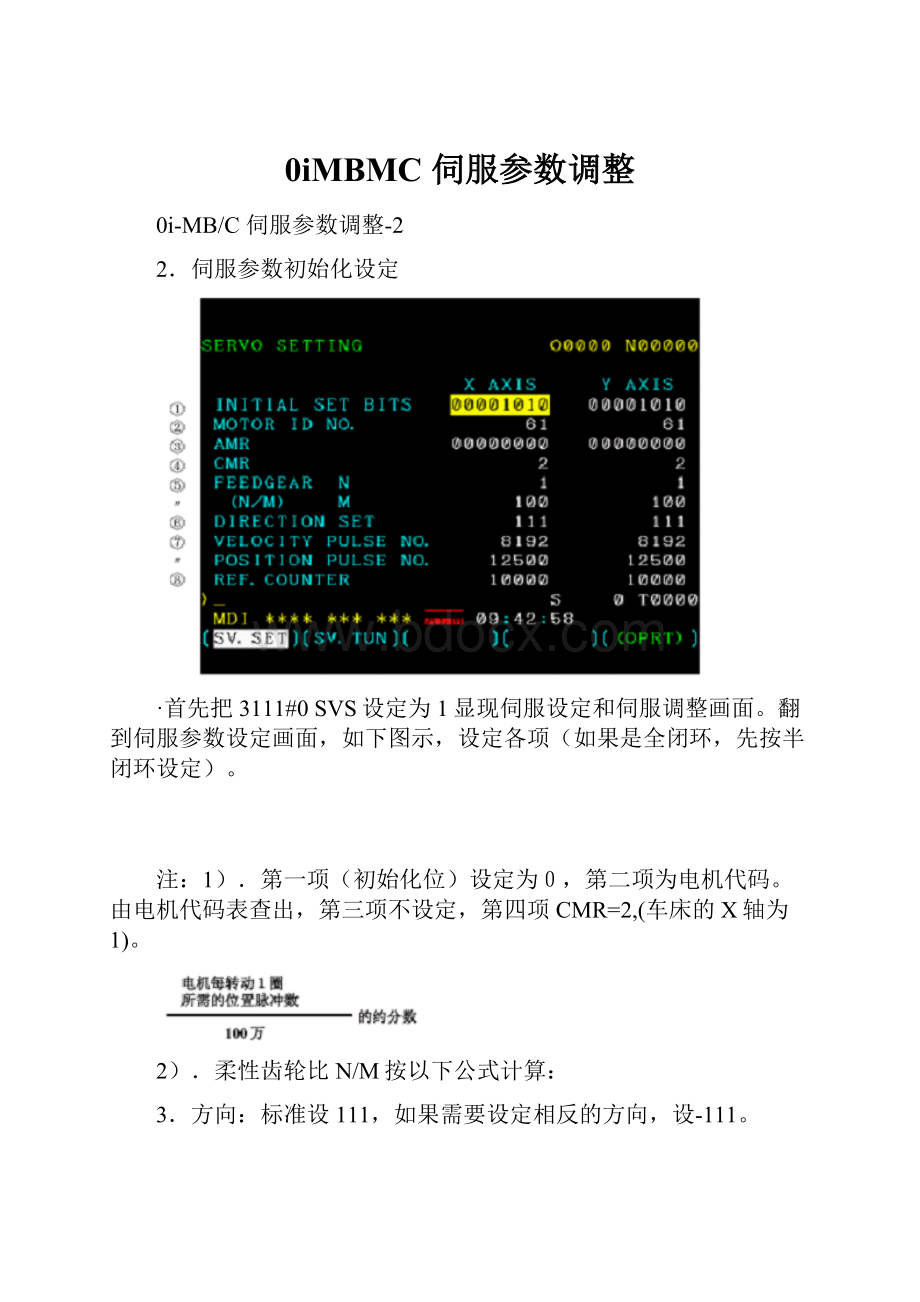
2.伺服参数初始化设定
·首先把3111#0SVS设定为1显现伺服设定和伺服调整画面。
翻到伺服参数设定画面,如下图示,设定各项(如果是全闭环,先按半闭环设定)。
注:
1).第一项(初始化位)设定为0,第二项为电机代码。
由电机代码表查出,第三项不设定,第四项CMR=2,(车床的X轴为1)。
2).柔性齿轮比N/M按以下公式计算:
3.方向:
标准设111,如果需要设定相反的方向,设-111。
速度反馈脉冲数为8192,位置反馈脉冲数12500,参考计数器容量:
按电机一转,反馈回来的位置脉冲数(如果设定不合适,回零将不准)。
如果回零减速档块太短或位置不合适也会导致回零不准。
以上参数设定完成后,关断系统电源,重新开机,则伺服初始化设定完成。
4.伺服调整画面。
以下为伺服调整画面,一般用户都忽略了此画面的调整,其实这方面的调整对机床更重要。
右侧的报警在诊断中可以看到,如下:
设定时,首先将功能位(2003)的位3(PI)设定1(冲床为0),回路增益(1825)设定为3000,比例,积分增益不要改,速度增益从200增加,每加100后,用JOG移动坐标,看是否震动,或看伺服波形(TCMD)是否平滑
注:
速度增益=(负载惯量比(参数2021)+256)/256*100。
负载惯量比表示电机的惯量和负载的惯量比,直接和具体的机床相关,一定要调整。
伺服波形显示:
参数3112#0=1(调整完后,一定要还原为0),关机再开。
如下所示:
采样时间设定5000,如果调整X轴,设定数据为51,检查实际速度。
在如下画面设定,
如果在起动时,波形不光滑,则表示伺服增益不够,需要再提高。
如果在中间的直线上有波动,则可能由于高增益引起的震动,这可通过设定参数2066=-10(增加伺服电流环250um)来改变,如果还有震动,可调整画面中的滤波器值(参数2067)=2000左右,再按上述步骤调整。
N脉冲抑制:
当在调整时,由于提高了速度增益,而引起了机床在停止时也出现了小范围的震荡(低频),从伺服调整画面的位置误差可看到,在没有给指令(停止时),误差在0左右变化。
使用单脉冲抑制功能可以将此震荡消除,按以下步骤调整:
a)参数2003#4=1,如果震荡在0-1范围变化,设定此参数即可。
b)参数2099,按以下公式计算。
4)有关250um加速反馈的说明:
·电机与机床弹性连接,负载惯量比电机的惯量要大,在调整负载惯量比时候(大于512),会产生50-150HZ的振动,此时,不要减小负载惯量比的值,可设定此参数进行改善。
·此功能把加速度反馈增益乘以电机速度反馈信号的微分值,通过补偿转矩指令Tcmd,来达到抑制速度环的震荡。
·参数2066=-10到-20,一般设-10。
·参数2067(Tcmd)一般设2000左右,具体如下表
截止频率
60
65
70
75
80
85
90
设定
2810
2723
2638
2557
2478
2401
2327
截止频率
95
100
110
120
130
140
150
设定
2255
2158
2052
1927
1810
1700
1596
截止频率
160
170
180
190
200
220
240
设定
1499
1408
1322
1241
1166
1028
907
截止频率
260
280
300
设定
800
705
622
可通过SERVOGUID测出振动频率,也可以通过降低或升高设定值来观察伺服波形。
5.防止过冲的调整:
·在手轮进给或其它微小进给时,发生过冲(指令1脉冲,走2个脉冲,再回来一个脉冲),可按如下步骤调整。
1)单脉冲进给动作原理:
2)使用不完全积分PK3V调整1个脉冲进给移动结束时的电机保持转矩。
3)参数:
2003#6=1,2045=32300左右,2077=50左右。
注:
如果因为电机保持转矩大,用上述参数设定还不能克服过冲,可增加2077的设定值(以10为倍数)。
如果在停止时不稳定,是由于保持转矩太低,可减小2077(以10为倍数)。
6.防止累计进给(爬行)的调整:
1)在手轮进给或其它微小进给时,发生指令1脉冲不走,两个脉冲一起走2个脉冲或更多个脉冲一起走,和上述情况相反,使用Vcmd偏移功能来提高单脉冲进给功能。
2)主要是由于机械摩擦太大,如果没有必要,一般可不调整此功能,调整不当会产生过冲。
3)动作过程原理如下:
3)参数:
2003#7=1,2045接近32767(32700),用手脉X1档移动,用千分表测量位置变化,进行调整。
7.重力轴防落调整:
一般重力轴的电机都带有制动器,在按急停时或伺服报警时,由于制动器的动作时间而产生的轴的跌落,可通过参数调整来避免。
参数调整:
2005#6=1,2083设定延时时间(ms),一般设定200左右,具体要看机械重力的多少。
如果是该轴放大器是2或3轴放大器,每个轴都要设定。
原理如下:
0i-MB/C伺服参数调整-3
8.全闭环伺服参数调整
基本连接:
2)基本设定:
分离型接口板M1可接四个轴的位置反馈,分别为JF101-JF104,在FSSB的轴设定画面上相应的轴上设定此号码,比如,如果Y,A分别接JF101,JF102,如下设定:
注意:
此参数设定结束后,不需要进行初始化或自动设定操作。
3)伺服参数修改:
参数:
1815#1=1。
在伺服参数设定画面上,修以下参数:
柔性齿轮比,按如下设定:
举例说明:
位置脉冲数,按如下方法设定:
注:
如果设定数大于32767,用参数2185做乘数。
参考计数器容量,按如下方法设定:
全闭环振动抑制的参数调整
由于在半闭环(电机)和全闭环之间有机械间隙和机械摩擦存在,并且这些间隙和摩擦是非线性的,所以,在半闭环调整好了以后,加上全闭环参数后,又会产生震动,这就需要重新调整伺服参数,按如下步骤进行:
双位置反馈
使用双位置反馈控制,可以使机械系统如同半闭环一样进行稳定控制,
ER1:
半闭环的误差计数器
ER2:
全闭环的误差计数器
参数调整:
1.2019#7(双位置反馈有效)=1;
2.2049(双位置反馈的最大振幅),一般设0;
3.2078/2079:
半闭环的柔性齿轮比;
4.2080(双位置反馈的一阶延时时间常数),设定值100-150,如果在加减速时不稳定,加大设定此值;
5.2081(双位置反馈的零位宽度),先设定为0,如果在停止时不稳定,加大此设定值。
机械速度反馈
在全闭环控制中,由于速度反馈是用电机的编码器,而位置使用独立的直线尺,在高速电流控制中,特别是加减速过程中,由于间隙或静摩擦,机械测的速度不能监测到(不一致),使用此功能可抑制由于加减速引起的振动。
比例项后的速度反馈
参数:
12012#1=1(机械速度反馈有效)
22088(机械速度反馈增益)按如下设定:
柔性齿轮比设定(2084/2085
1977/1978)
2017#7设定值
(速度环比例高速处理)
设定值范围
1/1
0
-30到-100
1
30-100
非1/1
0
-3000到-10000
1
3000-10000
 升级会员
升级会员 