第4章 凸轮机构与其他常用机构.docx
《第4章 凸轮机构与其他常用机构.docx》由会员分享,可在线阅读,更多相关《第4章 凸轮机构与其他常用机构.docx(31页珍藏版)》请在冰豆网上搜索。
第4章凸轮机构与其他常用机构
第4章凸轮机构与其他常用机构
4.1凸轮机构的应用与分类
4.1.1凸轮机构的应用
凸轮机构能将主动件的连续等速运动变为从动件的往复变速运动或间歇运动。
在自动机械、半自动机械中应用非常广泛。
凸轮机构是机械中的一种常用机构。
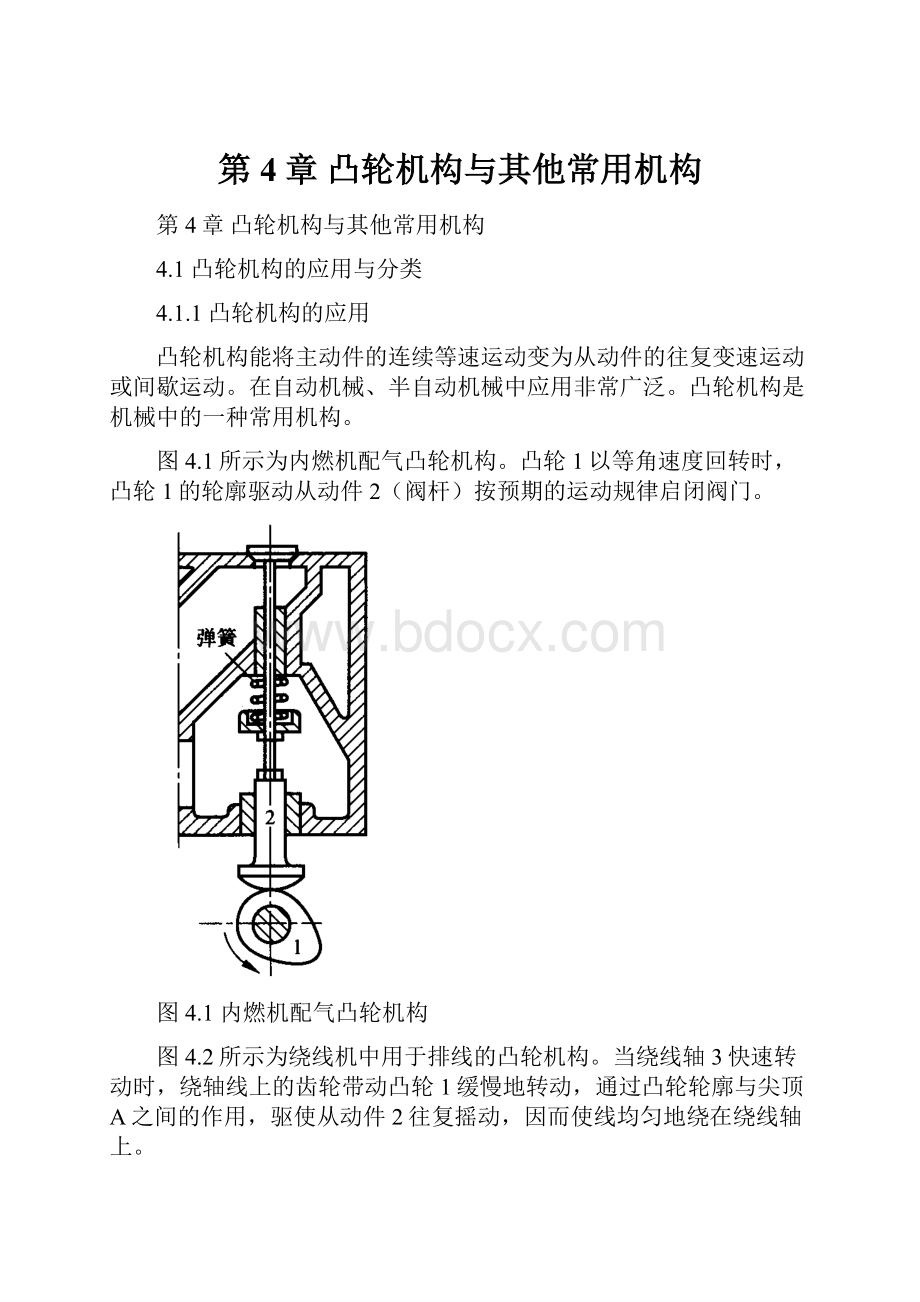
图4.1所示为内燃机配气凸轮机构。
凸轮1以等角速度回转时,凸轮1的轮廓驱动从动件2(阀杆)按预期的运动规律启闭阀门。
图4.1内燃机配气凸轮机构
图4.2所示为绕线机中用于排线的凸轮机构。
当绕线轴3快速转动时,绕轴线上的齿轮带动凸轮1缓慢地转动,通过凸轮轮廓与尖顶A之间的作用,驱使从动件2往复摇动,因而使线均匀地绕在绕线轴上。
图4.2绕线机中排线凸轮机构
图4.3所示为驱动动力头在机架上移动的凸轮机构。
圆柱凸轮1与动力头连接在一起,可以在机架3上作往复移动。
滚子2的轴被固定在机架3上,滚子2放在圆柱凸轮的凹槽中。
凸轮转动时,由于滚子2的轴是固定在机架上的,故凸轮转动时带动动力头在机架3上作往复移动,以实现对工件的钻削。
动力头的快速引进、等速进给、快速退回、静止等动作均取决于凸轮上凹槽的曲线形状。
图4.3动力头用凸轮机构
图4.4所示为应用于冲床上的凸轮机构示意图。
凸轮1固定在冲头上,当冲头上下往复运动时,凸轮驱使从动件2以一定的规律作水平往复运动,从而带动机械手装卸工件。
图4.4冲床上的凸轮机构
从以上所举的例子可以看出:
凸轮机构主要由凸轮、从动件和机架三个基本构件组成。
从动件与凸轮轮廓为高副接触传动,理论上讲可以使从动件获得所需要的任意的预期运动。
凸轮机构的优点是只需设计适当的凸轮轮廓,便可使从动件得到所需的运动规律,并且结构简单、紧凑,设计方便;其缺点是凸轮轮廓与从动件之间为点接触或线接触,易于磨损,故通常用于受力不大的控制机构。
4.1.2凸轮机构的分类
凸轮机构的类型很多,并且这些类型又常常交叉在一起,下面介绍常见的分类方法。
1.按凸轮形状分类
(1)盘形凸轮:
凸轮的最基本型式。
该类凸轮是一个绕固定轴转动并且具有变化半径的盘形零件,如图4.1和4.2所示。
(2)圆柱凸轮:
将移动凸轮卷成圆柱体即成为圆柱凸轮,如图4.3所示。
(3)移动凸轮:
当盘形凸轮的回转中心趋于无穷远时,凸轮相对机架作直线运动,这种凸轮称为移动凸轮,如图4.4所示。
2.按从动件形状分类
(1)尖顶从动件:
该类从动件结构最简单,尖顶能与任意复杂的凸轮轮廓保持接触,以实现从动件的任意运动规律,但尖顶易磨损,仅适用于作用力很小的低速凸轮机构。
(2)滚子从动件:
从动件的一端装有可自由转动的滚子,滚子与凸轮之间为滚动摩擦,磨损小,可以承受较大的载荷,因此得到广泛应用。
(3)平底从动件:
从动件的一端为一平面,直接与凸轮轮廓相接触。
若不考虑摩擦,凸轮对从动件的作用力始终垂直于端平面,传动效率高,且接触面间容易形成油膜,利于润滑,故常用于高速凸轮机构。
其缺点是不能用于凸轮轮廓有凹曲线的凸轮机构中。
(4)曲面从动件:
尖顶从动件的改进形式,较尖顶从动件不易磨损。
以上分类如表4.1纵排所示。
表4.1按从动件现状和从动件运动形式分类的凸轮机构
3.按从动件运动形式分类
(1)移动从动件:
从动件相对机架作往复直线运动。
根据移动从动件相对凸轮的回转轴心的位置,又可分为对心移动从动件和偏置移动从动件。
(2)摆动从动件:
从动件相对机架作往复摆动。
以上分类如表4.1横排所示。
4.按凸轮与从动件保持接触的形式分类
(1)力封闭凸轮机构:
依靠重力、弹簧力或其他外力使从动件与凸轮保持接触。
图4.1所示的内燃机配气机构是靠弹簧力使从动件与凸轮保持接触的。
(2)几何结构封闭凸轮机构:
依靠一定几何形状使从动件与凸轮保持接触。
图4.3所示的圆柱凸轮机构是靠圆柱体上的凹槽使从动件与凸轮保持接触。
4.2从动件的运动规律
从动件的运动规律是指从动件的位移s、速度v和加速度a随时间t变化的规律。
当凸轮作匀速转动时,其转角与时间t成正比(=t),所以从动件运动规律也可以用从动件的位移s、速度v和加速度a随凸轮转角变化的规律来表示,即s=s(),v=v(),a=a()。
通常用从动件运动线图直观地表述这些关系。
图4.5凸轮机构运动过程
以对心移动尖顶从动件盘形凸轮机构为例,说明凸轮与从动件的运动关系。
如图4.5(a)所示,以凸轮的回转轴心O为圆心,凸轮的最小向径rmin为半径所作的圆,称为凸轮的基圆,rmin称为基圆半径。
当凸轮与从动件在A点(凸轮轮廓曲线的起始点)接触时,从动件处于最低位置(即从动件处于距凸轮的回转轴心O最近位置)。
当凸轮以匀速1逆时针转动t时,凸轮轮廓AB段的向径逐渐增加,推动从动件以一定的运动规律到达最高位置B(此时从动件处于距凸轮的回转轴心O最远位置),这个过程称为推程。
这时从动件移动的距离h称为升程,对应的凸轮转角t称为推程运动角。
当凸轮继续转动s时,凸轮轮廓BC段向径不变,此时从动件处于最远位置停留不动,相应的凸轮转角s称为远休止角。
当凸轮继续转动h时,凸轮轮廓CD段的向径逐渐减小,从动件在重力或弹簧力的作用下,以一定的运动规律回到D点位置,这个过程称为回程。
对应的凸轮转角h称为回程运动角。
当凸轮继续转动s时,凸轮轮廓DA段的向径不变,此时从动件在最近位置停留不动,相应的凸轮转角s称为近休止角。
当凸轮再继续转动时,从动件又重复上述过程。
如果以直角坐标系的纵坐标表示从动件的位移s2,横坐标表示凸轮的转角1,则可以画出从动件位移s2与凸轮转角1之间的关系线图,如图4.5(b)所示,简称为从动件位移曲线。
下面介绍几种常用的从动件运动规律。
1.等速运动规律
从动件速度为定值的运动规律称为等速运动规律。
当凸轮以等角速度1转动时,从动件在推程或回程中的速度为常数,如图4.6(b)所示。
图4.6等速运动图4.7等加速运动
推程时,设凸轮推程运动角为t,从动件升程为h,相应的推程时间为T,则从动件的速度为:
常数
位移方程为
加速度方程为
初始条件为:
t=0时,s2=0;t=T时,s2=h,利用位移方程得到C2=0和C1=h/T。
因此有:
(4.1)
由于凸轮转角1=1t,t=1T,代入式(4.1),则得推程时从动件用转角表示的运动方程:
(4.2a)
回程时,从动件的速度为负值。
回程终了,s=0,凸轮转角为h。
同理可推出从动件的运动方程为
(4.2b)
由图4.6(b)和4.6(c)可知,从动件在推程开始和终止的瞬时,速度有突变,其加速度在理论上为无穷大(实际上,由于材料的弹性变形,其加速度不可能达到无穷大),致使从动件在极短的时间内产生很大的惯性力,因而使凸轮机构受到极大的冲击。
这种从动件在某瞬时速度突变,其加速度和惯性力在理论上趋于无穷大时所引起的冲击,称为刚性冲击。
因此,等速运动规律只适用于低速轻载的凸轮机构。
2.等加速等减速运动规律
从动件在行程的前半段为等加速,而后半段为等减速的运动规律,称为等加速等减速的运动规律。
如图4.7所示,从动件在升程h中,先作等加速运动,后作等减速运动,直至停止。
等加速度和等减速度的绝对值相等。
这样,由于从动件等加速段的初速度和等减速段的末速度为零,故两段升程所需的时间必相等,即凸轮转角均为t/2;两段升程也必相等,即均为h/2。
等加速段的运动时间为T/2(即t/21),对应的凸轮转角为t/2。
由于是等加速运动,因此s2=a0t2/2。
利用上述分析结果可得:
(4.3)
将上式积分两次,并代入初始条件:
1=0时,v2=0,s2=0;可推出从动件前半行程作等加速运动时的运动方程如下
(4.4a)
推程的后半行程从动件作等减速运动,此时凸轮的转角是由t/2开始到t为止。
同理可得其减速运动方程:
(4.4b)
图4.7(a)为按公式绘出的等加速等减速运动线图。
该图的位移曲线是一凹一凸两段抛物线连接的曲线,等加速段的抛物线可按下述方法画出:
在横坐标轴上将线段分成若干等分(图中为3等分),得1、2、3各点,过这些点作横轴的垂线。
再过点O作任意的斜线OO`,在其上以适当的单位长度自点O按1:
4:
9量取对应长度,得1、4、9各点。
作直线9-3",并分别过4、1两点,作其平行线4-2"和1-1",分别与s2轴相交于2"、1"点。
最后由1"、2"、3"点分别向过1、2、3各点的垂线投影,得1'、2'、3'点,将这些点连接成光滑的曲线,即为等加速段的抛物线。
用类似的方法可以绘出等减速段的抛物线。
由加速度线图4.7(c)可知,从动件在升程始末,以及由等加速过渡到等减速的瞬时(即O、m、e三处),加速度出现有限值的突然变化,这将产生有限惯性力的突变,从而引起冲击。
这种从动件在瞬时加速度发生有限值的突变时所引起的冲击称为柔性冲击。
因此,等加速等减速运动规律适用于中低速的凸轮机构。
3.简谐运动规律
点在圆周上做匀速运动时,点在这个圆的直径上的投影所构成的运动称为简谐运动,如图4.8(a)。
图4.8简谐运动
简谐运动规律位移线图的作法如下:
把从动件的行程h作为直径画半圆,将此半圆分成若干等份得1"、2"、3"、4"......点。
再把凸轮运动角也分成相应的等份1、2、3、4……,并作垂线11'、22'、33'、44'、......,然后将圆周上的等分点投影到相应的垂直线上得1'、2'、3'、4'、......点。
用光滑的曲线连接这些点,即得到从动件的位移线图,其方程为:
将上式求导两次,由图可知:
=p时,1=t,而凸轮作匀速转动,故=p1/t,由此,可导出从动件推程作简谐运动的运动方程:
(4.5a)
同理可求得从动件在回程作简谐运动的运动方程:
(4.5b)
由加速度线图可见,简谐运动规律的从动件在行程的始点和终点有柔性冲击,只有当加速度曲线保持连续时,这种运动规律才能避免冲击。
4.正弦加速度运动
如图4.9所示,一个半径为R的圆,沿纵轴作纯滚动时圆周上B点的轨迹为摆线,B点沿摆线运动的过程中在纵轴上投影就构成一个加速度为正弦曲线的运动轨迹,称为正弦加速度运动,也称为摆线运动规律。
图4.9正弦加速度运动规律
由于半径为R的圆作的是纯滚动,所以可以推出位移曲线方法:
由图可知,
当=2p时,1=t,故=2p1/t,由此可导出从动件推程作简谐运动的运动方程:
s2=h[δ1/δt-sin(2πδ1/δt)/2π]
v2=hω[1-cos(2πδ1/δt)]/δt(4.6a)
a2=2πhω2sin(2πδ1/δt)/δt
同理可求得从动件在回程作简谐运动的运动方程:
s2=h[1-δ1/δh+sin(2πδ1/δh)/2π]
v2=hω[cos(2πδ1/δh)-1]/δh(4.6b)
a2=-2πhω2sin(2πδ1/δh)/δh2
由运动线图可见,这种运动规律既无速度突变,也没有加速度突变,没有任何冲击,故可用于高速凸轮。
但它的缺点是加速度最大值较大,惯性力较大,要求较高的加工精度。
5.改进型运动规律简介
在上述运动规律的基础上有所改进的运动规律称为改进型运动规律。
例如,在推杆为等速运动的凸轮机构中,为了消除位移曲线上的折点,可将位移线图作一些修改。
如图4.10所示,将行程始、末两处各取一段圆弧或曲线OA及BC,并将位于曲线上的斜直线与这两段曲线相切,以使曲线圆滑。
当推杆按修改后的位移规律运动时,将不产生刚性冲击,但这时在OA及BC这两段曲线处的运动将不再是等速运动。
图4.10改进的等速运动位移曲线
在实际应用时,或者采用单一的运动规律,或者采用几种运动规律的配合,应视推杆的工作需要而定,原则上应注意减轻机构中的冲击。
4.3盘形凸轮轮廓设计
根据工作要求和结构条件,选定了凸轮机构的型式、凸轮转向、凸轮的基圆半径、滚子半径(对于滚子推杆)和从动件的运动规律后,就可以进行凸轮轮廓曲线的设计。
凸轮轮廓曲线的设计有图解法和解析法:
图解法简便易行、直观,但精确度低,只要细心作图,其图解的准确度是能够满足一般工程要求的;解析法精确度较高,但设计工作量大,可利用计算机进行计算。
下面只介绍图解法。
凸轮轮廓曲线设计所依据的基本原理是反转法原理,反转法原理介绍如下。
图4.11所示为一对心移动尖顶从动件盘形凸轮机构。
设凸轮的轮廓曲线已按预定的从动件运动规律设计,当凸轮以等角速度1绕轴心O转动时,从动件的尖顶沿凸轮轮廓曲线相对其导路按预定的运动规律移动。
现设想给整个凸轮机构加上一个公共角速度-1,此时凸轮将不动。
根据相对运动原理,凸轮和从动件之间的相对运动并未改变。
这样从动件一方面随其导路以角速度-1绕轴心O转动,一方面又在导路中按预定的规律作往复移动。
由于从动件尖顶始终与凸轮轮廓相接触,显然,从动件在这种复合运动中,其尖顶的运动轨迹即是凸轮轮廓曲线。
这种以凸轮作参考系,按相对运动原理设计凸轮轮廓曲线的方法称为反转法。
图4.11反转法原理
1.对心移动尖顶从动件盘形凸轮轮廓的设计
已知从动件的位移运动规律,凸轮的基圆半径rmin,以及凸轮以等角速度1顺时针回转,要求绘出此凸轮的轮廓。
图4.12对心移动尖顶从动件盘形凸轮
根据反转法原理,作图如下:
(1)根据已知从动件的运动规律,绘出从动件的位移线图(如图4.12(b)所示),并将横坐标用若干点等分凸轮转角。
(2)以rmin为半径作基圆。
此基圆与导路的交点B0便是从动件尖顶的起始位置。
(3)自OB0沿1的相反方向取凸轮转角t、h、S,并将这些转角等分成与图4.12(b)对应的若干等分,得C1、C2、C3、...点。
连接OC1、OC2、OC3...便是反转后从动件导路的各个位置。
(4)量取各个位移量,即取B1C1=11'、B2C2=22'、B3C3=33'、...得反转后尖顶的一系列位置B1、B2、B3、...。
(5)将B0、B1、B2、B3、...连成光滑的曲线,便得到所要求的凸轮轮廓(图4.12(a))。
2.对心移动滚子从动件盘形凸轮轮廓的设计
把尖顶从动件改为滚子从动件时,其凸轮轮廓设计方法如图4.13所示。
把滚子中心看作尖顶从动件的尖顶,按照上面的方法画出一条轮廓0,以0上各点为圆心,滚子半径为半径,画一系列圆,作这些圆的包络线b,便是滚子从动件凸轮的实际轮廓,而0称为此凸轮的理论轮廓。
由作图过程可知,滚子从动件凸轮轮廓的基圆半径rmin应当在理论轮廓上度量。
图4.13对心移动滚子从动件盘形凸轮
3.偏置移动尖顶从动件盘形凸轮轮廓的设计
如图4.14所示,偏置移动尖顶从动件盘形凸轮轮廓的设计与前述相似。
图4.14偏置移动尖顶从动件盘形凸轮
由于从动件导路的轴线不通过凸轮的回转轴心,其偏距为e,所以从动件在反转过程中,其导路轴线始终与以偏距e为半径所作的偏距圆相切,从动件的位移应沿切线量取。
作图方法如下:
(1)根据已知从动件的运动规律,绘出从动件的位移线图,并将横坐标分段等分凸轮转角,如图4.12(b)所示。
(2)在基圆上,任取一点B0作为从动件升程的起始点,并过B0作偏距圆的切线,该切线即是从动件导路线的起始位置。
(3)由B0点开始,沿相反方向将基圆分成与位移线图相同的等份,得各等分点B1'、B2'、B3'...。
过B1'、B2'、B3'...各点作偏距圆的切线并延长,则这些切线即为从动件在反转过程中依次占据的位置。
(4)在各条切线上自B1'、B2'、B3'...截取B1'B1=11,B2'B2=22,B3'B3=33...得B1、B2、B3...各点。
将B0、B1、B...各点连成光滑曲线,便得到所要求的凸轮轮廓(图4.14)。
4.4凸轮机构基本尺寸的确定
设计凸轮机构时,不仅要保证从动件实现预定的运动规律,还需要确定凸轮机构的一些基本尺寸,如基圆半径、移动从动件的偏距、滚子半径等。
这些基本尺寸的选择除了要保证从动件能够准确地实现预期的运动规律外,还要求传动时受力良好、结构紧凑,因此,在设计凸轮机构时应注意基本尺寸的确定。
1.滚子半径
如图4.15所示,理论轮廓上最小曲率半径为min,实际轮廓曲线半径a,滚子半径为rT,三者之间关系如下:
1)内凹的凸轮轮廓曲线
由图4.15(a)可得
a=min+rT(4.7)
由上式可知,实际轮廓曲率半径总大于理论轮廓曲率半径。
因而,不论选择多大的滚子半径,都能做出凸轮的实际轮廓。
2)外凸的凸轮轮廓曲线
由图4.15(b)可得
a=min-rT(4.8)
(1)当min>rT时,a>0,如图4.15(b)所示,实际轮廓为一平滑曲线。
(2)当min=rT时,a=0,如图4.15(c)所示,在凸轮实际轮廓曲线上产生了尖点,这种尖点极易磨损,磨损后就会改变从动件预定的运动规律。
(3)当min图4.15滚子半径对轮廓的影响
为了使凸轮轮廓在任何位置既不变尖也不相交,滚子半径必须小于理论轮廓外凸部分的最小曲率半径min。
如果min过小,按上述条件选择的滚子半径太小而不能满足安装和强度要求时,就应当把凸轮基圆尺寸加大,重新设计凸轮轮廓曲线。
2.凸轮机构压力角
凸轮机构从动件所受正压力的方向(沿凸轮轮廓线在接触点的法线方向)与从动件上B点的速度方向之间所夹的锐角称为凸轮机构的压力角。
图4.16凸轮机构的压力角与半径的关系
图4.16所示为尖顶直动从动件凸轮机构。
当不考虑摩擦时,正压力F可分解为沿从动件速度方向的有用分力Ft和使从动件压紧导路的有害分力Fn,其关系式为:
Fn=Fttan(4.9)
当驱动从动件的有效分力Ft一定时,压力角越大,则有害分力Fn就越大,机构的效率就越低。
当增大到一定程度,以致Fn所引起的摩擦阻力大于有用分力Ft时,无论凸轮加给从动件的作用力多大,从动件都不能运动,这种现象称为自锁。
从改善凸轮机构受力情况、提高凸轮机构效率、避免自锁的角度考虑,压力角越小越好。
如图4.16所示,设凸轮以等角速1顺时针转动,从动件与凸轮在B点接触,从动件上B点移动速度vB2=v2;凸轮上B点的速度vB1=r1,方向垂直于lOB;从动件上B点相对速度vB2B1的方向与凸轮过B点的切线方向重合。
根据点的复合运动速度合成原理,则可做出B点的速度三角形,如图4.16所示。
若给定从动件运动规律,则1、v2、s2均为已知,当凸轮机构压力角越大时,则凸轮机构基圆半径越小,相应凸轮机构尺寸也愈小。
因此,从凸轮机构结构紧凑的观点看,凸轮机构压力角越大越好。
综上所述,在一般情况下,既要求凸轮机构有较高效率、受力情况良好,又要求凸轮机构结构紧凑,因此,凸轮机构压力角不能过大也不能过小。
为保证凸轮机构能正常运转,应使其最大压力角max小于许用压力角[]。
推荐的许用压力角为:
推程(工作行程):
移动从动件[]=30°;摆动从动件[]=45°。
回程:
因受力较小且无自锁问题,许用压力角可取得大些,通常[]=80°
3.凸轮基圆半径
在设计凸轮机构时,凸轮的基圆半径取得越小,所设计的机构越紧凑。
但是,必须指出的是凸轮基圆半径过小会引起压力角增大,使凸轮机构工作效率降低,从图4.16可知:
(4.10)
显然,在其他条件不变的情况下,基圆半径r0越小,压力角a越大。
基圆半径过小,压力角会超过许用压力角而使机构效率太低甚至发生自锁。
实际设计中,在保证凸轮的最大压力角不超过许用压力角的前提下,合理地确定凸轮的基圆半径,使凸轮机构的尺寸不至过大。
4.5其他常用机构
1.槽轮机构
槽轮机构又称马尔他机构。
如图4.17所示,由带圆销A的主动拨盘1,具有径向槽的从动槽轮2和机架组成。
拨盘作匀速转动时,驱动槽轮作时转时停的单向间歇运动。
当拨盘上的圆销A未进入槽轮径向槽时,由于槽轮的内凹锁止弧b被拨盘的外凸圆弧卡住,故槽轮静止。
图示位置是圆销A刚开始进入槽轮径向槽时的情况,这时锁止弧刚被松开,因此槽轮受圆销A的驱动开始沿顺时针方向转动;当圆销A离开径向槽时,槽轮的下一个内凹锁止槽又被拨盘的外锁止槽卡住,致使槽轮静止,直到圆销A在进入槽轮另一径向槽时,又重复上述的运动循环。
槽轮机构有两种基本型式:
外啮合槽轮机构,如图4.17所示;内啮合槽轮机构,如图4.18所示。
图4.17外啮合槽轮机构图4.18内啮合槽轮机构
槽轮机构结构简单,机械效率高,并且运动平稳,因此在自动机床转位机构、电影放映机卷片机构等自动机械中得到广泛的应用,槽轮机构一般应用于转速不很高、要求间歇地转过一定角度的分度装置中。
2.棘轮机构
图4.19所示为外啮合棘轮机构,由摆杆1、棘爪2、棘轮3、止回爪4和机架5组成。
通常以摆杆为主动件、棘轮为从动件。
当摆杆1连同棘爪2顺时针转动时,棘爪进入棘轮的相应齿槽,并推动棘轮转过相应的角度;当摆杆逆时针转动时,棘爪在棘轮齿顶上滑过。
为了防止棘轮跟随摆杆反转,设置止回爪4。
这样,摆杆不断地作往复摆动,棘轮便得到单向的间歇运动。
图4.19外啮合棘轮机构图4.20内啮合棘轮机构
棘轮机构还可以做成内啮合形式(图4.20)或移动棘轮(即棘条)形式(图4.21),其工作原理和外啮合棘轮机构类似。
图4.21棘条机构图4.22摩擦棘轮机构
如图4.22所示为摩擦式棘轮机构,当摆杆1作逆时针转动时,利用楔块2与摩擦轮3之间的摩擦产生自锁,从而带动摩擦轮3和摆杆一起转动;当摆杆作顺时针转动时,楔块2与摩擦轮3之间产生滑动,这时由于楔块4的自锁作用能阻止摩擦轮反转。
这样,在摆杆不断作往复运动时,摩擦轮3便作单向的间歇运动。
棘轮机构还常用作制动器以防止机构逆转,这种棘轮制动器广泛用于卷扬机、提升机以及运输和牵引设备中。
图4.23所示为提升机中的棘轮制动器。
当重物被提升过程中,如果机械发生故障,棘轮机构的止回棘爪将及时对棘轮制动,防止棘轮倒转,从而起到安全的作用。
图4.23提升机中的棘轮制动器
棘轮机构也常在各种机械中起超越作用,其中最常见的例子之一是自行车的传动装置。
如图4.24所示为自行车后轮轴上的棘轮机构。
当脚蹬踏板时,经链轮1和链条2带动内圈具有棘齿的链轮3逆时针转动,再通过棘爪4的作用,使后轮轴5逆时针转动,从而驱使自行车前进。
当自行车前进时,如果踏板不动,后轮轴5便会超越链轮3而转动,让棘爪4在棘轮齿背上划过,从而实现不蹬踏板的自由滑行。
图4.24超越式棘轮机构
其他常用机构除了上面介绍的槽轮机构、棘轮机构外,还有擒纵机构、不完全齿轮机构、星轮机构、非圆齿轮机构、螺旋机构、组合机构等,可查阅有关参考资料。
习题
4.1如图4.25示为一偏置直动从动件盘形凸轮机构。
已知AB段为凸轮的推程廓线,试在图上标注推程运动角t。
图4.25图4.26图4.27
4.2图4.26所示为一偏置直动从动件盘形凸轮机构。
已知凸轮为一以C为中心的圆盘,问轮廓上D点与尖顶接触时其压力角为多少?
试作图加以表示。
4.3图4.27示为一对心尖顶推杆单元弧凸轮(偏心轮),其几何中心O’与凸轮转轴O
 升级会员
升级会员 