matalbMicrosoft Word 文档.docx
《matalbMicrosoft Word 文档.docx》由会员分享,可在线阅读,更多相关《matalbMicrosoft Word 文档.docx(10页珍藏版)》请在冰豆网上搜索。
matalbMicrosoftWord文档
第一题被控对象数学模型识别,假设被控对象模型为:
和
,阶跃输入信号为2。
如图1—1建立一阶被控对象数学模型
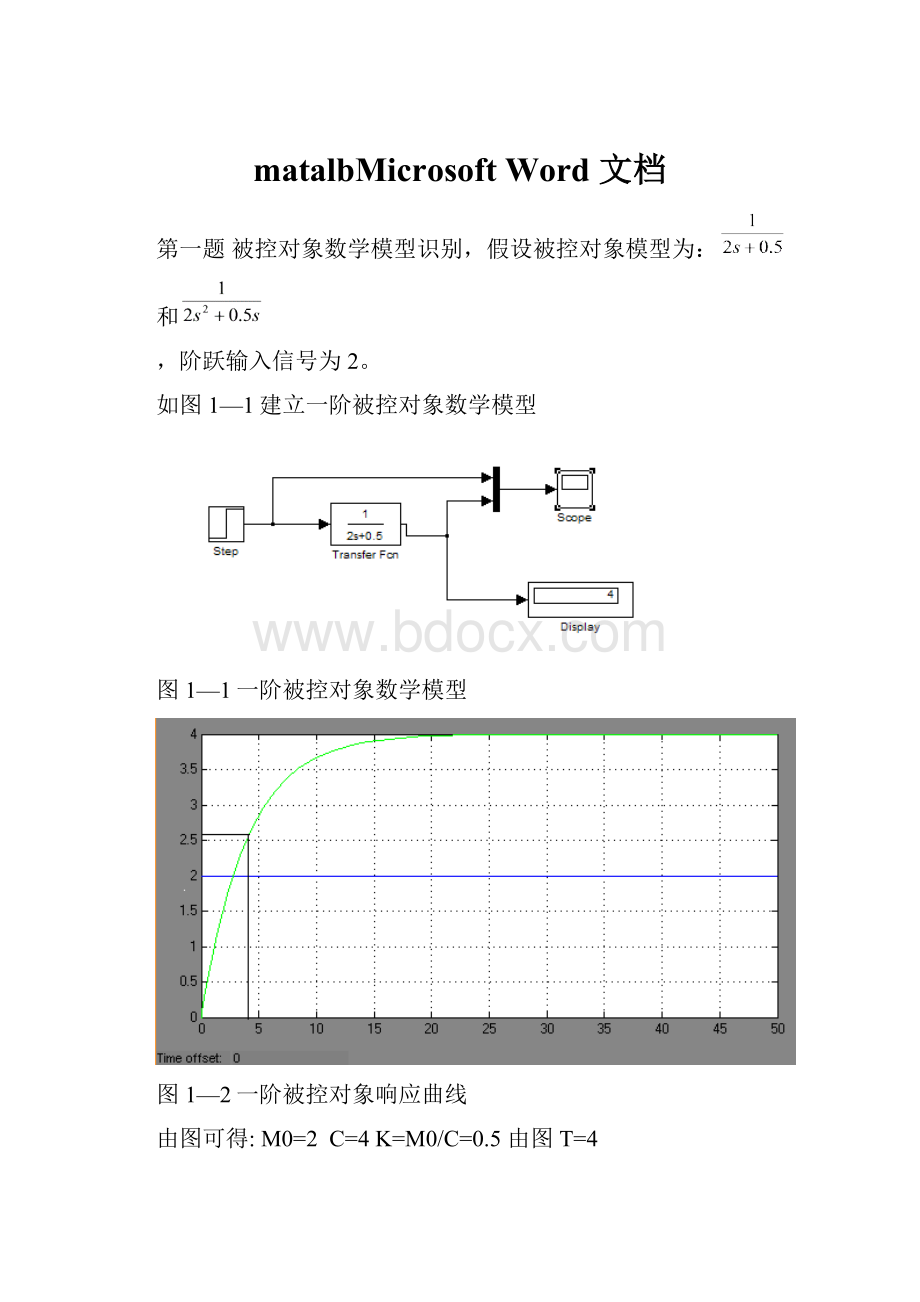
图1—1一阶被控对象数学模型
图1—2一阶被控对象响应曲线
由图可得:
M0=2C=4K=M0/C=0.5由图T=4
a=KT=0.5*4=2
如图2—1建立一阶被控对象数学模型
如图2—1二阶被控对象数学模型
图2—2二阶被控对象响应曲线
第二题力矩电机随动控制,假设被控对象模型为:
和
,阶跃输入信号为1。
如图建立速度位置PDF控制原理图
图3—1速度控制系统PDF伪微分反馈控制图
图3—2响应曲线
图3—3位置控制系统PDF伪微分反馈控制图
图3—4响应曲线
如图建立速度位置PI控制原理图
图4—1速度控制系统PI反馈控制图
图4—2响应曲线
图5—1速度控制系统PI反馈控制图
图5—2响应曲线
第三题电机速度控制抗干扰仿真,假设被控对象模型为:
,阶跃输入为5,负载初始为1,20秒后变为4,分别用PI和PDF来进行仿真。
图6—1速度抗干扰系统PDF伪微分反馈控制图
图6—2响应曲线
图6—3干扰信号
图7—1速度抗干扰系统PI伪微分反馈控制图
图7—2响应曲线
图7—3干扰信号
由上图比较可得在速度PI反馈调节系统和PDF反馈调节系统中,20s后分别给系统输入一个相同干扰信号后PDF反馈调节比PI反馈调节要好,由响应曲线
图7—2和图6—2可得:
PDF反馈调节系统比较稳定,系统能迅速消除干扰的影响,受外界的干扰波动较小,而PI反馈系统与PDF反馈系统比较起来不及PDF反馈系统好,受外界干扰较大且时间长,所以PDF反馈调节系统较优越。
第四题电机位置控制抗干扰仿真,假设被控对象模型为:
,阶跃输入为5,负载初始为1,20秒后变为4,分别用PI和PDF来进行仿真。
图8—1位置抗干扰系统PI伪微分反馈控制图
图8—2响应曲线
图8—3干扰信号
图9—1位置抗干扰系统PDF伪微分反馈控制图
图9—2响应曲线
图9—3干扰信号
由上图比较可得在位置PI反馈调节系统和PDF反馈调节系统中,20s后分
别系统输入一个相同干扰信号后PDF反馈调节比PI反馈调节要好,由响应曲线
图8—2和图9—2可得:
PDF反馈调节系统比较稳定,系统能迅速消除干扰的影响,受外界的干扰波动较小,而PI反馈系统与PDF反馈系统比较起来不及PDF反馈系统好,受外界干扰较大且时间长,所以PDF反馈调节系统较优越。
 升级会员
升级会员 