最新BERKUT金雕雷达测速仪汇总.docx
《最新BERKUT金雕雷达测速仪汇总.docx》由会员分享,可在线阅读,更多相关《最新BERKUT金雕雷达测速仪汇总.docx(27页珍藏版)》请在冰豆网上搜索。
最新BERKUT金雕雷达测速仪汇总
BERKUT金雕雷达测速仪
金雕(BERKUT)雷达测速仪
一、系统简介
产品名称:
机动车雷达测速仪
品牌型号:
BERKUT/金雕
制造商:
俄罗斯奥利维亚(OLVIA)公司
机动车雷达测速仪为一种雷达设备,其工作原理为雷达所发射的高频信号从处于在其作用范围内的移动目标反射时改变频率值(多普勒效应)。
这种多普勒频移正比于移动目标的速度。
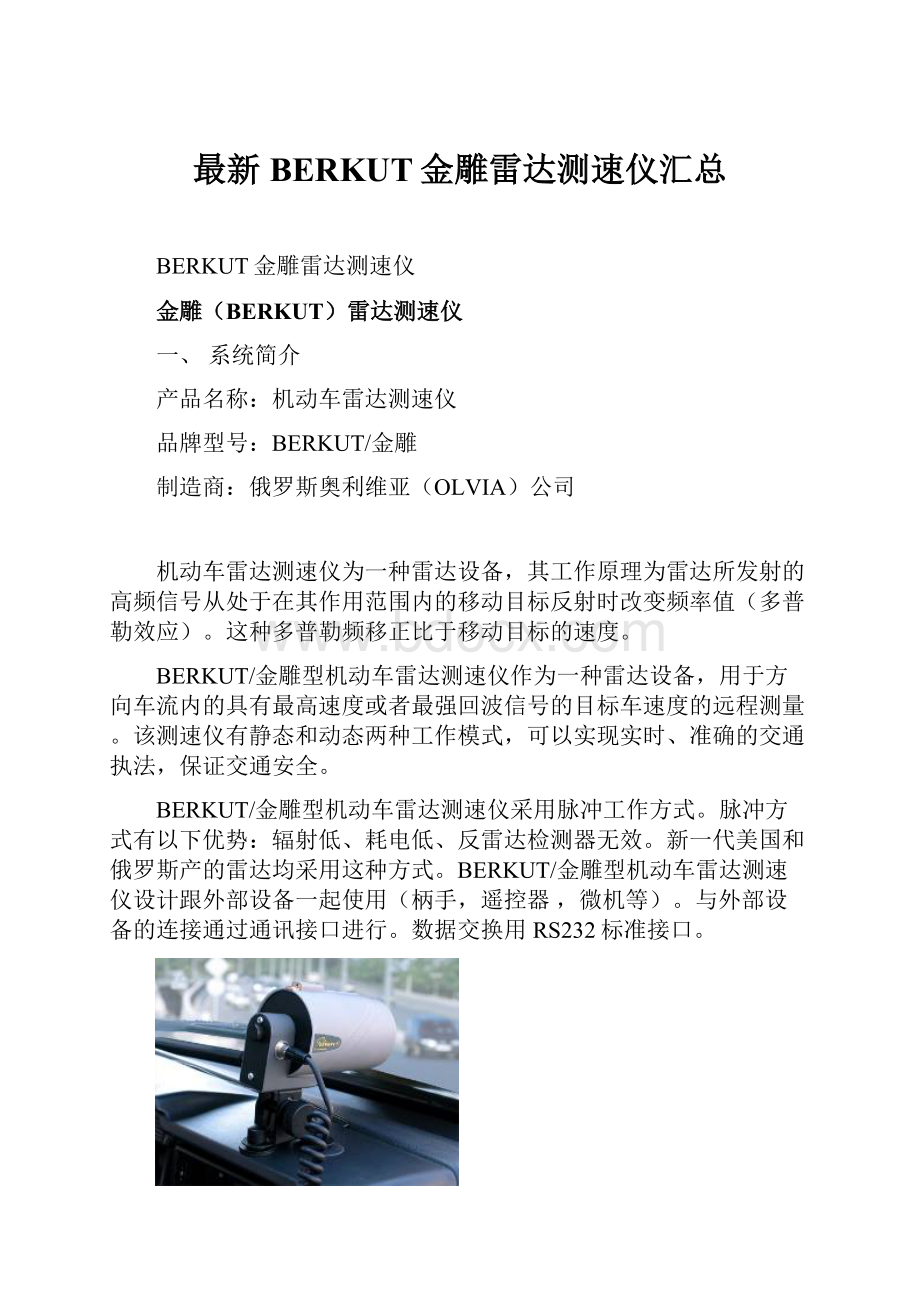
BERKUT/金雕型机动车雷达测速仪作为一种雷达设备,用于方向车流内的具有最高速度或者最强回波信号的目标车速度的远程测量。
该测速仪有静态和动态两种工作模式,可以实现实时、准确的交通执法,保证交通安全。
BERKUT/金雕型机动车雷达测速仪采用脉冲工作方式。
脉冲方式有以下优势:
辐射低、耗电低、反雷达检测器无效。
新一代美国和俄罗斯产的雷达均采用这种方式。
BERKUT/金雕型机动车雷达测速仪设计跟外部设备一起使用(柄手,遥控器,微机等)。
与外部设备的连接通过通讯接口进行。
数据交换用RS232标准接口。
车载测速手持测速
车载测速车外测速
二、
系统组成及工作原理
系统组成
雷达测速器雷达安装支架雷达附属接插件
其他配件
手持测速方式手柄遥控器
工作原理
多普勒雷达原理:
脉冲多普勒雷达的工作原理可表述如下:
当雷达发射一固定频率的脉冲波对空扫描时,如遇到活动目标,回波的频率与发射波的频率出现频率差,称为多普勒频率。
根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度。
三、
技术指标
雷达发射频率:
24.150GHz
测速范围:
20~250km/h
测速距离:
800m
测速精度:
静态±1km/h
动态自身±1km/h
目标±2km/h
发射波瓣角:
14°
测速时间:
不大于0.3s
数据接口:
RS232
外形尺寸:
105*75*85
雷达重量:
不大于0.35kg
防水标准:
IP54
电磁兼容性:
合格
测速仪辐射安全:
合格
环境温度:
(-30~60)℃
环境湿度:
(5~90)%
电源适应性:
DC12V
耗电量:
不大于0.2A
四、系统优越性
1.体积小巧,重量轻,外形优美
2.是当前国际市场上最先进的交通测速雷达,口径约6cm,长约10cm,重量仅0.35kg
3.使用方式更加多样,可手持,可车载
4.反应时间更快,时间不大于0.3秒
5.测速精度高,可测量范围广,强度可调
6.可测量最近目标车辆的速度,有效排除其它车辆干扰
7.识别监控目标车方向,具有自动的行驶方向功能,排除反向行驶车辆的干扰
8.可同时跟踪测量两个速度,协议公开,支持系统二次开发
9.采用脉冲发射方式,降低被电子狗发现的机率,同时雷达辐射量更小,减小其对人体的伤害
10.计量器具具有制造厂家及品牌型号标牌,以及产品序列号
五、系统开发样例
六、
进口计量器具型式批准证书
七、
系统接线协议
八、
软件通讯协议
1指令代码表示用HEX(十六进制)代码.
2数据传递方向:
指令–来自微机回答–来自BERKUT测速器.
微机
BERKUT
测速器"Беркут"
指令оманда
回答
图1–数据传递线路
2代码段用于指定代码值或者备注段指定的变量.
3在传递字代码(word)先传递低字节,再传高字节
4缩写:
TS–交通工具,IS–测量工具.
5量纲段中指定的所传递值的量纲:
byte-1个字节,word-2个字节.
6数据交换用串行COM-端口(RS232接口).
通讯协议:
-波特率–9600
-停止比特–1
-数据比特数–8
-奇偶校验–无
-方向控制–Xon/Xoff
7微机连接用nulmodemconnection(COM)线(RS232接口的控制线不用).
代码
单位
备注
1询问有效状态
命令检查BERKUT测速器是否存在
命令
1
21
byte
前辍
2
1
byte
命令代码
回答
1
1
byte
与命令代码相同
代码
单位
备注
2BERKUT测速器重新启动
该命令引起BERKUT测速器的重新启动
命令
1
21
byte
前辍
2
2
byte
命令代码
命令
1
2
byte
与命令代码相同
代码
单位
备注
3读取BERKUT测速器的配置信息
1"Regim"(3)字段–比特域.比特解释:
比特0:
0–速度单位用公里/小时表示/1–速度单位用英里/小时表示;
比特1:
0–测速器处于静态模式/1–测速器处于静态模式;
比特2:
0–测速器处于检测反向车辆模式/1–测速器处于检测相向(同向)车辆模式;
比特3-7–不用(备用);
比特8:
0–第1目标类型为最快目标/1–第1目标类型为最近目标;
比特9:
0–第2目标类型为最快目标/1–第2目标类型为最近目标;
比特10-15–不使用(备用).
2配置信息的读取和记录采用统一数据结构(2-7).该结构的内容(确认之后)可以更改.
3Baffle(4)区域解释:
阈值–目标信号的振幅允许最小值.阈限关系式:
Baffle=32768*10^(Thr/20),гдеThr–目标检测阈值,dB[-90….0],50m内参考值-40~-30dB。
命令
代码
单位
1
21
byte
前辍
2
3
byte
命令代码
回答
1
Length
Word
配置表长度(包括所有信息字段,字段-2-4域,长度以字段表示)
2
SerNum
word
BERKUT测速器序列号
3
Regim
word
BERKUT测速器工作模式
4
Baffle
word
BERKUT测速器设定的目标检测阈限
5
CS
byte
校验之和(按mod256所有命令和数据之和-1-2域为命令+1-4域为回答)
代码
单位
备注
4BERKUT测速器配置信息的写入
1配置信息表的字段解释和命令4相同.
2新的参数传送之后会立即有效,但不会写入存储器.
命令
代码
单位
1
21
byte
前辍
2
4
byte
命令代码
3
Length
word
配置表长度(包括所有字段,信息字段–4-6域,长度以字段表示)
4
SerNum
word
BERKUT测速器序列号
5
Regim
word
BERKUT测速器工作模式
6
Baffle
word
BERKUT测速器阈限值
回答
1
CS
byte
校验值(按mod256所有收到的字节之和–1-6区域命令)
代码
单位
备注
5配置表写入固定存储器
1该命令启动配置表信息从内存转写到固定存储器.
2发送命令之后更改起效时间小于2秒
命令
1
21
Byte
前辍
2
5
Byte
命令代码
回答
1
5
Byte
与命令代码相同
代码
单位
备注
6单次测量
速度单位按照测速器配置表的信息(公里/小时或英里/小时)
命令
1
21
Byte
前辍
2
6
Byte
命令代码
回答
1
21
Byte
前辍
2
Count
Byte
被跟踪目标数
3
Speed1
Byte
第一目标速度值
4
Speed2
Byte
第二目标速度值
代码
单位
备注
7信息读取
1Param域的解释:
0–按照(N=2048)信号的数据传输;
1–按照振幅光谱(N=1024)的数据传输.
2Data域的解释:
如果以(Param(3)=0)信号的方式传递–传递方式如下:
1024个计算字段第一个信号;
1024个计算字段第二个信号.
如果以(Param(3)=1)振幅的方式传递–传递方式如下:
512个计算光谱字段正极频率;
512个计算光谱字段负极频率.
命令
1
21
Byte
前辍
2
8
Byte
命令代码
3
Param
Byte
参数
回答
1
Data
N*word
前辍
2
CS
Byte
校验值(按mod256)
代码
单位
备注
9高频控制部分
命令
1
21
byte
前辍
2
9
byte
命令代码
3
State
byte
状态(0-高频发生器被关——)关闭,1-高频发生器被开——〉打开)
回答
1
9
byte
与命令代码相同
代码
单位
备注
10外接控制和显示单元的控制
BERKUT测速器对外接单元的控制命令无反应.
命令
1
21
byte
前辍
2
А
byte
前辍
3
Com-mand
byte
外接单元控制命令
代码
单位
备注
11节能状态的控制
在收到该命令之后,BERKUT测速器将切关(关闭)所有能量消耗对象并进入节能状态.通过RS232端口收到任何字节之后BERKUT测速器将推出该状态.
命令
1
21
byte
前辍
2
B
byte
命令代码
代码
单位
备注
12检测单元的测试
1速度单位按照测速器配置表的信息(公里/小时或英里/小时).
2BERKUT测速器在接受该命令之后开始测试高频单元.
命令
1
21
byte
前辍
2
С
byte
命令代码
回答
1
21
byte
前辍
2
Count
byte
被发现目标数
3
Speed1
byte
第一目标速度
4
Speed2
byte
第二目标速度
代码
单位
备注
13测速器型号的检测
命令
1
80
byte
命令代码
回答
1
А7
byte
BERKUT测速器确认码
雷达作用距离的设置在4号命令“BERKUT测速器配置信息的写入”的第6号分命令(代码:
Baffle)进行。
作用距离可以细调,公式在“读取BERKUT测速器的配置信息”命令给出。
在把手和遥控器内存程序采用如下值:
最远作用距离Thr=–60Db,相当于Baffle=32(НЕХ20)
中程作用距离Thr=–54Db,相当于Baffle=65(НЕХ41)
最小作用距离Thr=–48Db,相当于Baffle=130(НЕХ82)
另外,数据交换协议加了新的命令:
连续测量之后(比如用把手时连续按着进行连续测量结束之后会发送该命令)
代码
单位
备注
8(英文版本的编号)扳机状态设置
接到该命令之后,金雕测速器预备开始新一轮测量
命令
命令
1
21
byte
前缀
2
0D
byte
命令代码
3
0
雷达数据交换协议应用
数据交换协议有8号命令(英文为Triggerstatesetting),在中文版本该命令在最后面。
如果测量之间的间隔长于5秒,一定要发送该命令。
雷达作用距离最好设置小一些。
11检测单元的测试-用于自检。
不能检查作用距离,只能判断能否正常工作。
1.该程序没有必要加协议上的新的8号命令。
2.程序中作用距离设置为48dB。
如果目标超速车在50m内,作用距离应该设置小一些。
3.程序有两个错误:
A.在接收测速命令反馈:
雷达反馈:
[0х21][性能][V1|V2]
V1和V2–为速度值,在该程序中为巡逻车和目标车的车速。
程序错误为:
[0х21][性能,V1][V2|]
在这种情况下,数据会不正确:
V1将会等于0,或者128km/h。
B.发送测速命令的时候:
测速器收到命令后,需要300msec停顿,才给反馈。
在发送下一个命令之前,一定要等到反馈!
程序中:
先发送测速命令,等待50msec,再发送测速命令,等250msec。
这一定要改!
九、
通讯协议常用指令解释
检测测速器的种类
指令:
[0x80].
测速器的回复:
[0xA7].
描述:
检测测速器的种类。
目的是确认跟测速器有连接。
读出测速器的设置值
命令:
[0x21][0x03].
测速器的回复:
[长度(int16)][设置值(长度х2)][校验合]
测速器的设置值单元从配置信息开始:
[测速器生产序列号(int16)][测速器工作模式(int16)][目标检测阀值(int16)].
测速器工作模式:
比特用途
0测量单位:
公理/小时(0),英里/小时
(1).
1静态模式(0)/动态模式
(1).
2反向模式(0)/同向模式
(1).
3-7一律设置(0).
8目标种类:
最快(0)/最近
(1).
9赋值与8号比特相同的值
10-15一律设置(0).
目标检测阀值:
可接受目标信号的振幅最小值.定义公式为:
式中Thr–阀值,分贝为单位[-60;0].(~0分贝相应于数模交换器的最大值:
0x7fff)。
描述:
读出测速器当前的设置值。
长度-用16位字符串的数表示(不大于128)。
校验合(字节)-所有发送和接受字节之合。
测速器回复举例:
例1.
030000000000200047
长度序列号No工作模式阀值校验合
解释:
长度:
3个字节
序列号No:
0
工作模式(换算为BIN):
比特值参数
00以公理/小时进行测速
10静态模式
20测速反向目标
30规定值
40规定值
50规定值
60规定值
70规定值
80测最快目标
90与8号字节相同
100规定值
110规定值
120规定值
130规定值
140规定值
150规定值
阀值:
换算为DEC:
32
按公式算出Thr=-60分贝(最高灵敏度).
校验合:
47(21+03+03+00+00+00+00+00+20+00)
例2.
0300000006007E00AB
长度序列号No工作模式阀值校验合
解释:
长度:
3个字节
序列号No:
0
工作模式(换算为BIN):
比特值参数
00以公理/小时进行测速
10动态模式
20测速同向目标
30规定值
40规定值
50规定值
60规定值
70规定值
80测最快目标
90与8号字节相同
100规定值
110规定值
120规定值
130规定值
140规定值
150规定值
阀值:
换算为DEC:
126
按公式算出Thr=-48分贝(最高灵敏度).
校验合:
47(21+03+03+00+00+00+06+00+7E+00)
测速器设置写入.
命令:
[0x21][0x04][长度(int16)][[设置值(长度х2)]
测速器的回复:
[校验合]
描述:
向测速器写入新的置值。
新的设置写入之后立即有效。
备注:
设置值写入合读出采用同一种格式。
测速器的设置值单元从配置信息开始:
[测速器生产序列号(int16)][测速器工作模式(int16)][目标检测阀值(int16)].
测速器工作模式:
比特用途
0测量单位:
公理/小时(0),英里/小时
(1).
1静态模式(0)/动态模式
(1).
2反向模式(0)/同向模式
(1).
3-7一律设置(0).
8目标种类:
最快(0)/最近
(1).
9赋值与8号比特相同的值
10-15一律设置(0).
目标检测阀值:
可接受目标信号的振幅最小值.定义公式为:
式中Thr–阀值,分贝为单位[-60;0].(~0分贝相应于数模交换器的最大值:
0x7fff)。
单次测量
指令:
[0x21][0x06].
测速器回复:
[0x21][性能][v1][v2].
描述:
进行一次测量。
回复包括前缀0x21,性能合速度值字节。
[性能]–信号旗字节:
比特描述
0,1目标数量
2...140
15干扰存在:
0–无,1–有.
测速器回复举例:
例1:
21000000
前辍目标数–0第一个目标速度=0第二个目标速度=0
例2:
21015800
前辍目标数–1第一个目标速度=88第二个目标速度=0
例3.
21023757
前辍目标数–2第一个目标速度=55第二个目标速度=87
例4.
21FF0000
ПрефиксПомеханетизмеренийнетизмерений
前辍干扰无测量无测量
如果使用动态模式,第一个目标速度总为巡逻车本身速度值。
如果使用静态模式,第一个目标速度按照设置被确定:
最快或者最近目标
使测速器进入休眠状态
指令:
[0x21][0x0D][0х00].
测速器回复:
未设置回复
描述:
该指令是非必须指令。
在以下情况下建议使用:
单次测量间隔超过5秒。
该指令使得测速器“忘记”之前所有测量的“历史”,降低耗电(减少测速器的发热)。
使测速器进入工作模式
指令:
[0x21][0x0D][0х01].
测速器回复:
[0x0D].
描述:
非必须指令。
在以下情况下建议使用:
开始新一轮测量之前。
一十、
雷达测试软件使用说明
1、接通雷达电源,DC12V
2、连接好RS232通讯线
3、打开RadarTest软件
4、点击RadarConnect(连接雷达)
如未连接上,请检查雷达电源,RS232连线
5、按需求设置测速模式、测速方向、目标选择、测速灵敏度,并保存设置
6、测速模式:
静态测速:
测速雷达或测速警车是静止不动的
动态测速:
测速雷达或测速警车是移动巡逻测速。
7、测速方向:
本产品是根据多普勒原理制造的交通测速雷达
反向:
目标靠近测速雷达(拍车头)
同向:
目标远离测速雷达(拍车尾)
8、目标选择
当雷达探测区域内有多辆目标车辆时,
最快目标:
速度1为最快车辆速度
最强目标:
速度1为最强车辆速度,即最近目标
9、雷达测速灵敏度设置,0~60,0为最低,60为最高,一般测速需求设置灵敏度为30~35,如发现干扰太多,可适当降低雷达灵敏度,如发现漏车严重,可适当调高灵敏度。
10、WriteConfig保存设置,当根据需求设定好雷达工作参数后,一定要保存设置。
11、设置好雷达工作参数后,请选择连续测速选择框,并点击速度显示,此时,当有车辆经过雷达探测区域时,即可根据设置的参数工作模式进行测速。
12、雷达同时返回两个速度,当在静态测速时,返回的是当前的两个目标的速度,如只有一个目标,则速度2为0,当在动态测速时,速度1为本车车速,速度2为目标车速。
 升级会员
升级会员 