可控源音频大地电磁法应用于地热资源勘查.docx
《可控源音频大地电磁法应用于地热资源勘查.docx》由会员分享,可在线阅读,更多相关《可控源音频大地电磁法应用于地热资源勘查.docx(16页珍藏版)》请在冰豆网上搜索。
可控源音频大地电磁法应用于地热资源勘查
可控源音频大地电磁法应用于地热资源勘查
可控源音频大地电磁法应用于地热资源勘查(3)
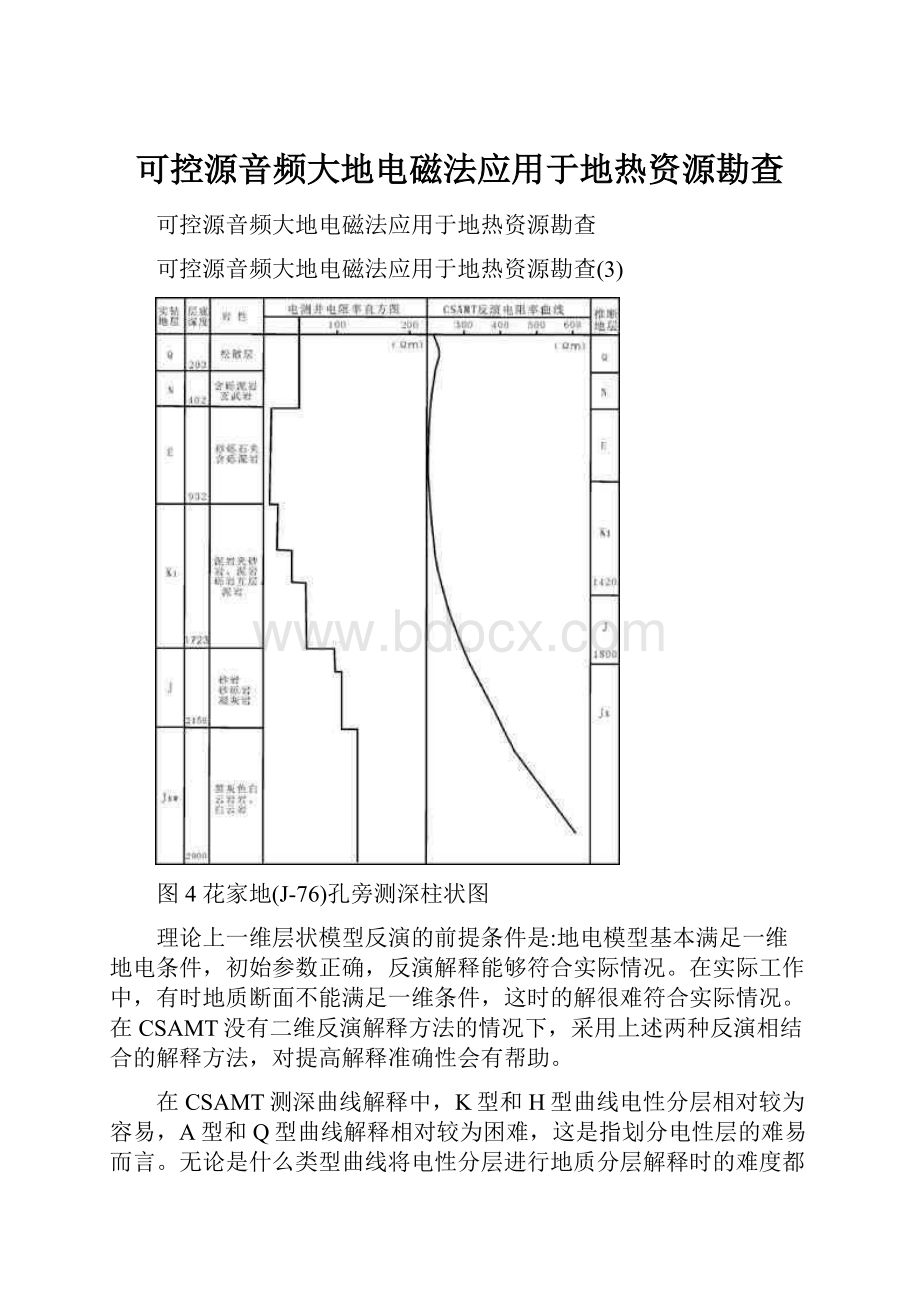
图4花家地(J-76)孔旁测深柱状图
理论上一维层状模型反演的前提条件是:
地电模型基本满足一维地电条件,初始参数正确,反演解释能够符合实际情况。
在实际工作中,有时地质断面不能满足一维条件,这时的解很难符合实际情况。
在CSAMT没有二维反演解释方法的情况下,采用上述两种反演相结合的解释方法,对提高解释准确性会有帮助。
在CSAMT测深曲线解释中,K型和H型曲线电性分层相对较为容易,A型和Q型曲线解释相对较为困难,这是指划分电性层的难易而言。
无论是什么类型曲线将电性分层进行地质分层解释时的难度都是比较大,特别是新区难度更大。
如怀柔庙城地热井和大兴庞各庄地热井均为明显的K型曲线,电性分层没有问题,但是在地质解释上都出了大问题。
实钻表明前者将蓟县系铁岭组解释为奥陶系、寒武系地层(误差达1520m,286%);后者将蓟县系雾迷山组地层解释为寒武系(误差1800m,450%)。
前者是附近有一眼旧井的误导,后者是属于不够慎重(前人只推有Qn,这次又加上?
,错上加错)。
产生问题的根源是物探的地质解释多解性。
O、?
及Jx都可以是中高阻电性层。
解释为其中的哪一个一定要慎重,充分搜集已知孔的资料(准确的),由已知推未知,做出正确的判断。
这两口地热井实施结果表明:
地质分层出了问题(张冠李戴),
不仅仅是热储层埋深误差大小问题,更为严重的是推断的盖层条件(地层和厚度)与实际出入很大,直接影响温度预测,出现温度风险,给工作造成了很大的被动。
目前庞各庄地热井采取的补救措施是将热储目的层由蓟县系雾迷山组改为长城系高于庄组。
从北京统计的一部分地热井的测井电阻率看,电性层与地层不是完全一一对应的。
有时在同一个时代地层有两个电性层或多个电性层,如K或J中的电性层(有时是系中组的反映),也1
有一个电性层是由跨两个时代地层的同种岩性组成(如?
+Q)。
因此,地质分层解释是一个1cnj
非常细致和复杂的工作,一定要倍加慎重。
3.4系统整理钻孔电测井资料
探测对象与围岩的物性差异是产生物探异常的前提条件,没有物性异常就没有物探异常,也就不能进行物探工作。
可见采用CSAMT法划分地层的前提条件是地层要有电性差异,只有掌握了一个地区地层的电性规律,才能有效地进行地层解释工作。
因此,电性资料不仅是CSAMT法应用的依据,同时也是资料解释的基础。
可以说CSAMT资料解释的成败与已知钻孔及电测井资料掌握的程度有密切关系,特别是当目的层反映不是很明显时,有重要作用。
系统整理钻孔电测井资料,提供不同时代地层的电性资料为CSAMT勘查工作所用,是一个地区物探工作的重大技术措施,是提高CSAMT等电磁法资料解释水平的重要途径。
以北京而言,解放后的数十年间在深部地下水勘查工作,特别是近20-30年开凿的数百眼地热深钻井,积累了大量的钻孔电测井资料,若能充分进行整理,将能够按不同地质构造单元,提供不同时代地层的电性参数,这是电法工作极其重要的基础资料。
遗憾的是这项工作没有引起人们的足够重视,不能将其挖掘出来,为我所用。
2001年中国矿业联合会地热管理专业委员会在承担课题研究时,曾对北京近30眼地热井的电测井资料进行了尝试性的整理工作。
采用统计归纳的方法总结出北京地区各类地层的电阻率特征。
由于测井所测电阻率是包括了侵入岩电阻率、泥浆电阻率、围岩电阻率以及井径等影响因素,对此用几种量板对视电阻率进行了校正。
但是由于参数不全,不能得到理想的地层真电阻率值,对校正后的电阻率值统称为“测井电阻率”。
由于钻孔数量少,未能按不同地质构造单元进行统计分析,仅提供了北京部分地热井钻遇地层“测井电阻率”统计分析成果。
这近30眼地热井的地层测井电阻率资料,在近两年中的CSAMT资料解释工作中部分得到应用,发挥了作用。
主要是利用其建立初始模型,进行一维层状模型反演解释,联合一维圆滑反演解释提高地层分层解释的准确性。
4推广应用CSAMT法
通过北京地区近十年CSAMT法的实际应用与初步总结,表明CSAMT法是一种行之有效的物探方法,在地热资源勘查工作中可以发挥较好的作用。
CSAMT法具有工作效率高、探测深度较大、分辨能力较强,适合于区域性地热勘查工作。
它能够提供深部地质构造的地电信息,为研究勘查区地热田的地热地质条件提供重要依据。
在区域性地热勘查工作中,当勘查目的层深度小于3000m时,CSAMT法应理所当然的成为主要勘查手段。
当有时探测深度要求大于3000m(或部分3000m)时,则应利用MT(或CEMP)
法,与CSAMT方法进行组合的工作方式,这是因为CSAMT不仅能够提供3000m以浅地电结构,可以与MT互相印证,更为重要的是它可以较MT更为精确的确定断裂构造的位置和产状。
在盆地型地热田勘查工作中探明断裂构造十分重要,因为它与地热田的形成及地下热水的储集关系十分密切。
北京地区有一些地热井出水量较大,出水温度较高,就是因为地热井打在断裂构造带附近。
5开展应用研究
CSAMT法引进我国后,有关单位从理论基础、方法以及应用效果等方面进行了一些研究工作,对推动CSAMT法在我国的应用起到了推动作用。
通过在北京地区的实际应用,一方面我们感到这种方法确实是一个很有发展前景的方法,同时亦感到要使CSAMT法应用好,充分发挥它的作用,克服它的一些不足之处,还需加强应用研究。
一是需要从野外工作到室内数据处理与资料解释等方面做一些应用性的试验研究工作;二是利用已验证的钻孔进行对比分析研究,总结方法的有效性,发现存在的问题,研究解决的方法;三是试验适合于城市地热资源勘探新方法技术—大功率可控源大地电磁测深法。
5.1应用性试验研究工作
鉴于工作经费和忙于生产工作等原因,该方法在引进国内后,未能全面系统的进行应用性试验研究工作,其中包括从野外工作到室内数据处理与资料解释等多个环节的试验研究工作,使我们对于该方法缺乏全面深入的了解,致使在实际应用中遇到的一些问题也难于得到圆满解决。
有关部门应专门确定研究项目,加强这方面工作。
5.2对比分析研究
有部分CSAMT工作已得到钻孔验证,应当高度重视利用这些宝贵的钻孔资料与CSAMT进行对比分析研究,既可以总结该方法有效性,同时又能够发现工作中存在的问题,研究解决的方法,提高CSAMT法应用水平。
5.3开展富水性研究
开凿地热井有三大风险:
深度风险、温度风险和水量风险。
CSAMT进行的地层推断解释能帮助解决深度风险;温度风险问题不大,只要是用户不提出过高要求,地层结构和盖层厚度推断得较准确,一般按地层增温率计算出的温度与实际差别不大;当前最大风险属于水量风险,凿井前非常需要知道凿井地区岩溶裂隙发育情况,是否是富水地段,我们应当重视研究CSAMT能否提供这方面的信息。
一方面在数据处理时要特别注意不要将这部分有用信息滤掉;另一方面通过一些出水量比较大的钻孔与CSAMT进行对比分析研究,看看含水层在CSAMT反演电阻率曲线上有什么样异常特征。
我们要将这个要求明确告诉CSAMT工作者,让他们重视研究这方面的问题。
5.4开发大功率可控源大地电磁场法
CSAMT法在北京实际应用中,一方面发现在城市强干扰情况下严重影响资料质量,降低可信度,影响成果的利用;另外发现其纵向分辨率满足不了需要,特别是深部频点很稀,分辨能力不够,对盆地型地热勘查工作,深部是地热勘查的主要目标,CSAMT在深部的纵向分辨率的降
低,对地热勘查工作影响较大,另外勘探深度还不能完全满足需要。
为此中国石油集团物探局综合物化探事业部(原石油五处)近年来在原CSAMT法基础上开发出大功率可控源大地电磁测深法(CSMT)。
CSMT测深技术勘探系统的发射系统为F200大功率发射机,最大额定功率为160kw,最大输出电压为1600V,最大输出电流为160A。
接收系统由加拿大凤凰公司生产的V-6A多功能电法仪,有61个频点。
该方法特点是:
勘探深度大,超过4km;频点多,提高了纵向分辨能力;抗干扰能力强,采集数据质量高。
最近他们在任丘油田区进行了试验:
剖面长6km,供电电极AB=4km,收发距R=7.5km,供电电流I=140A,接收点电极距MN=50m。
所采集52个测点数据质量除少数测点外,大部分测点质量比较好。
对剖面数据进行二维反演计算,纵向上电性分层明显,推断潜山顶面埋深与实际较一致。
初步试验表明该方法在电磁干扰严重的油田区能取得较好的效果,有较大勘探深度(4km)和较高的纵向分辨率,为城市地热勘探带来了新的希望。
但是要正式投入生产使用,还应该再做些试验工作。
永磁交流伺服电机位置反馈传感器检测相位与电机磁极相位的对齐方式2008-11-07来源:
internet浏览:
504
主流的伺服电机位置反馈元件包括增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等。
为支持永磁交流伺服驱动的矢量控制,这些位置反馈元件就必须能够为伺服驱动器提供永磁交流伺服电机的永磁体磁极相位,或曰电机电角度信息,为此当位置反馈元件与电机完成定位安装时,就有必要调整好位置反馈元件的角度检测相位与电机电角度相位之间的相互关系,这种调整可以称作电角度相位初始化,也可以称作编码器零位调整或对齐。
下面列出了采用增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等位置反馈元件的永磁交流伺服电机的传感器检测相位与电机电角度相位的对齐方式。
增量式编码器的相位对齐方式
在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.用示波器观察编码器的U相信号和Z信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:
1.用示波器观察编码器的U相信号和电机的UV线反电势波形;
2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;
4.一边调整,一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点,最终使上升沿和过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
由于普通增量式编码器不具备UVW相位信息,而Z信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而不作为本讨论的话题。
绝对式编码器的相位对齐方式
绝对式编码器的相位对齐对于单圈和多圈而言,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。
早期的绝对式编码器会以单独的引脚给出单圈相位的最高位的电平,利用此电平的0和1的翻转,也可以实现编码器和电机的相位对齐,方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.用示波器观察绝对编码器的最高计数位电平信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察最高计数位信号的跳变沿,直到跳变沿准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,跳变沿都能准确复现,则对齐有效。
这类绝对式编码器目前已经被采用EnDAT,BiSS,Hyperface等串行协议,以及日系专用串行协议的新型绝对式编码器广泛取代,因而最高位信号就不符存在了,此时对齐编码器和电机相位的方法也有所变化,其中一种非常实用的方法是利用编码器内部的EEPROM,存储编码器随机安装在电机轴上后实测的相位,具体方法如下:
1.将编码器随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取绝对编码器的单圈位置值,并存入编码器内部记录电机电角度初始相位的EEPROM中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的编码器内部EEPROM中的位置检测值就对应电机电角度的-30度相位。
此后,驱动器将任意时刻的单圈位置检测数据与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要编码器和伺服驱动器的支持和配合方能实现,日系伺服的编码器相位之所以不便于最终用户直接调整的根本原因就在于不肯向用户提供这种对齐方式的功能界面和操作方法。
这种对齐方法的一大好处是,只需向电机绕组提供确定相序和方向的转子定向电流,无需调整编码器和电机轴之间的角度
关系,因而编码器可以以任意初始角度直接安装在电机上,且无需精细,甚至简单的调整过程,操作简单,工艺性好。
如果绝对式编码器既没有可供使用的EEPROM,又没有可供检测的最高计数位引脚,则对齐方法会相对复杂。
如果驱动器支持单圈绝对位置信息的读出和显示,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示绝对编码器的单圈位置值;
3.调整编码器转轴与电机轴的相对位置;
4.经过上述调整,使显示的单圈绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的单圈绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算位置点都能准确复现,则对齐有效。
如果用户连绝对值信息都无法获得,那么就只能借助原厂的专用工装,一边检测绝对位置检测值,一边检测电机电角度相位,利用工装,调整编码器和电机的相对角位置关系,将编码器相位与电机电角度相位相互对齐,然后再锁定。
这样一来,用户就更加无从自行解决编码器的相位对齐问题了。
个人推荐采用在EEPROM中存储初始安装位置的方法,简单,实用,适应性好,便于向用户开放,以便用户自行安装编码器,并完成电机电角度的相位整定。
正余弦编码器的相位对齐方式
普通的正余弦编码器具备一对正交的sin,cos1Vp-p信号,相当于方波信号的增量式编码器的AB正交信号,每圈会重复许许多多个信号周期,比如2048等;以及一个窄幅的对称三角波Index信号,相当于增量式编码器的Z信号,一圈一般出现一个;这种正余弦编码器实质上也是一种增量式编码器。
另一种正余弦编码器除了具备上述正交的sin、cos信号外,还具备一对一圈只出现一个信号周期的相互正交的1Vp-p的正弦型C、D信号,如果以C信号为sin,则D信号为cos,通过sin、cos信号的高倍率细分技术,不仅可以使正余弦编码器获得比
原始信号周期更为细密的名义检测分辨率,比如2048线的正余弦编码器经2048细分后,就可以达到每转400多万线的名义检测分辨率,当前很多欧美伺服厂家都提供这类高分辨率的伺服系统,而国内厂家尚不多见;此外带C、D信号的正余弦编码器的C、D信号经过细分后,还可以提供较高的每转绝对位置信息,比如每转2048个绝对位置,因此带C、D信号的正余弦编码器可以视作一种模拟式的单圈绝对编码器。
采用这种编码器的伺服电机的初始电角度相位对齐方式如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.用示波器观察正余弦编码器的C信号波形;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察C信号波形,直到由低到高的过零点准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,过零点都能准确复现,则对齐有效。
撤掉直流电源后,验证如下:
1.用示波器观察编码器的C相信号和电机的UV线反电势波形;
2.转动电机轴,编码器的C相信号由低到高的过零点与电机的UV线反电势波形由低到高的过零点重合。
这种验证方法,也可以用作对齐方法。
此时C信号的过零点与电机电角度相位的-30度点对齐。
如果想直接和电机电角度的0度点对齐,可以考虑:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察编码器的C相信号由低到高的过零点和电机U相反电势波形由低到高的过零点,最终使2个过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
由于普通正余弦编码器不具备一圈之内的相位信息,而Index信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而在此也不作为讨论的话题。
如果可接入正余弦编码器的伺服驱动器能够为用户提供从C、D中获取的单圈绝对位置信息,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示从C、D信号中获取的单圈绝对位置信息;
3.调整旋变轴与电机轴的相对位置;
4.经过上述调整,使显示的绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算绝对位置点都能准确复现,则对齐有效。
此后可以在撤掉直流电源后,得到与前面基本相同的对齐验证效果:
1.用示波器观察正余弦编码器的C相信号和电机的UV线反电势波形;
2.转动电机轴,验证编码器的C相信号由低到高的过零点与电机的UV线反电势波形由低到高的过零点重合。
如果利用驱动器内部的EEPROM等非易失性存储器,也可以存储正余弦编码器随机安装在电机轴上后实测的相位,具体方法如下:
1.将正余弦随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取由C、D信号解析出来的单圈绝对位置值,并存入驱动器内部记录电机电角度初始安装相位的EEPROM等非易失性存储器中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的驱动器内部EEPROM等非易失性存储器中的位置检测值就对应电机电角度的-30度相位。
此后,驱动器将任意时刻由编码器解析出来的与电角度相关的单圈绝对位置值与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要伺服驱动器的在国内和操作上予以支持和配合方能实现,而且由于记录电机电角度初始相位的EEPROM等非易失性存储器位于伺服驱动器中,因此一旦对齐后,电机就和驱动器事实上绑定了,如果需要更换电机、正余弦编码器、或者驱动器,都需要重新进行初始安装相位的对齐操作,并重新绑定电机和驱动器的配套关系。
旋转变压器的相位对齐方式
旋转变压器简称旋变,是由经过特殊电磁设计的高性能硅钢叠片和漆包线构成的,相比于采用光电技术的编码器而言,具有耐热,耐振。
耐冲击,耐油污,甚至耐腐蚀等恶劣工作环境的适应能力,因而为武器系统等工况恶劣的应用广泛采用,一对极(单速)的旋变可以视作一种单圈绝对式反馈系统,应用也最为广泛,因而在此仅以单速旋变为讨论对象,多速旋变与伺服电机配套,个人认为其极对数最好采用电机极对数的约数,一便于电机度的对应和极对数分解。
旋变的信号引线一般为6根,分为3组,分别对应一个激励线圈,和2个正交的感应线圈,激励线圈接受输入的正弦型激励信号,感应线圈依据旋变转定子的相互角位置关系,感应出来具有SIN和COS包络的检测信号。
旋变SIN和COS输出信号是根据转定子之间的角度对激励正弦信号的调制结果,如果激励信号是sinωt,转定子之间的角度为θ,则SIN信号为sinωt×sinθ,则COS信号为sinωt×cosθ,根据SIN,COS信号和原始的激励信号,通过必要的检测电路,就可以获得较高分辨率的位置检测结果,目前商用旋变系统的检测分辨率可以达到每圈2的12次方,即4096,而科学研究和航空航天系统甚至可以达到2的20次方以上,不过体积和成本也都非常可观。
商用旋变与伺服电机电角度相位的对齐方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出;
2.然后用示波器观察旋变的SIN线圈的信号引线输出;
3.依据操作的方便程度,调整电机轴上的旋变转子与电机轴的相对位置,或者旋变定子与电机外壳的相对位置;
4.一边调整,一边观察旋变SIN信号的包络,一直调整到信号包络的幅值完全归零,锁定旋变;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,信号包络的幅值过零点都能准确复现,则对齐有效。
撤掉直流电源,进行对齐验证:
1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;
2.转动电机轴,验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合。
这个验证方法,也可以用作对齐方法。
此时SIN信号包络的过零点与电机电角度相位的-30度点对齐。
如果想直接和电机电角度的0度点对齐,可以考虑:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;
4.一边调整,一边观察旋变的SIN信号包络的过零点和电机U相反电势波形由低到高的过零点,最终使这2个过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
需要指出的是,在上述操作中需有效区分旋变的SIN包络信号中的正半周和负半周。
由于SIN信号是以转定子之间的角度为θ的sinθ值对激励信号的调制结果,因而与sinθ的正半周对应的SIN信号包络中,被调制的激励信号与原
 升级会员
升级会员 