基于DSP的汽车磁流变减振悬架系统控制策略设计与研究.doc
《基于DSP的汽车磁流变减振悬架系统控制策略设计与研究.doc》由会员分享,可在线阅读,更多相关《基于DSP的汽车磁流变减振悬架系统控制策略设计与研究.doc(37页珍藏版)》请在冰豆网上搜索。
中北大学2012届毕业设计说明书
1绪论
随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
1.1车辆悬架系统的分类及发展
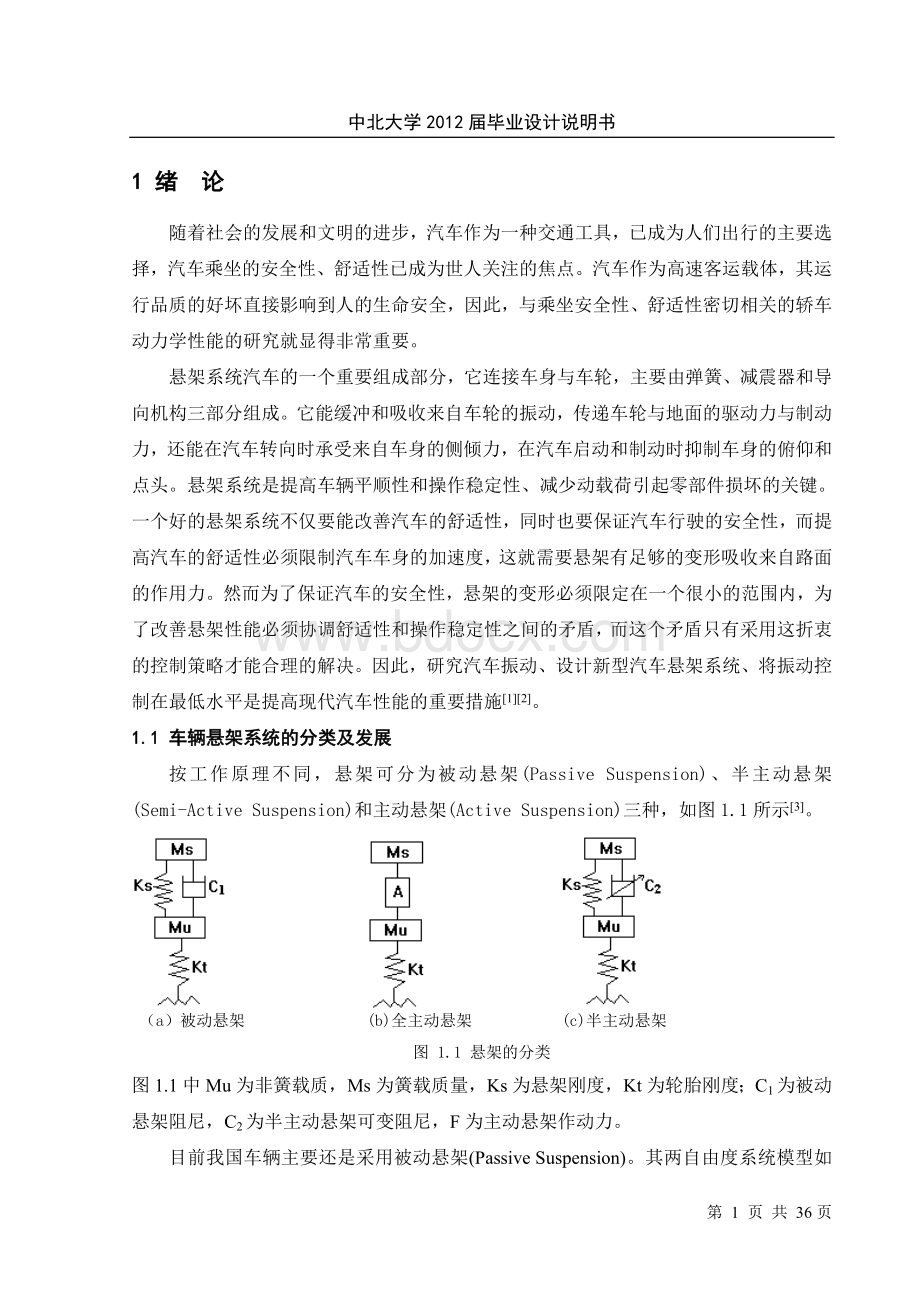
按工作原理不同,悬架可分为被动悬架(PassiveSuspension)、半主动悬架(Semi-ActiveSuspension)和主动悬架(ActiveSuspension)三种,如图1.1所示[3]。
(a)被动悬架(b)全主动悬架(c)半主动悬架
图1.1悬架的分类
图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(PassiveSuspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
它的结构简单,性能可靠,经过不断改进,现在发展的已比较成熟。
然而,汽车在行驶过程中,其平顺性和操纵稳定性对悬架参数的要求是不同的,要想同时兼顾两者是很困难的,即使经过优化,也只能使它在特定的车速和路面下才能达到最佳。
所以,悬架的特性参数一经选定,就无法随汽车运行的工况和激励的变化而进行调节,故其减振性能的进一步提高也就会受到限制。
为了克服被动悬架存在的缺点,人们尝试了很多方法,如采用非线性变刚度弹簧,虽然取得了一定的效果,但是仍不能从根本上消除上述的缺陷。
改善悬架性能的根本出发点在于改善悬架对车轮和车身的作用,这可以从改变悬架刚度或阻尼或同时改变两者入手.于是主动、半主动悬架的研究就逐步开始了。
1954年,GM公司Erspie.Labrose在悬架设计中首先提出主动悬架的思想[3]。
主动悬架的基本原理是用可调刚度的弹簧或可调阻尼的减振器组成的悬架系统,该系统采用有源或无源可控制的元件组成了一个闭环控制系统,它可以根据车辆预测的激励和簧载质量的加速度响应等反馈信号,按照一定的控制规律调节可调弹簧和可调阻尼器的参数,以抑制车体的运动,使悬架始终处于最优减振状态。
主动悬架的特点就是能够根据外界的输入或车辆本身状态的变化进行动态自适应调节。
这种悬架系统为在根本上改善汽车悬架系统的性能,提供了一条崭新的途径。
图1.1(b)为两自由度全主动悬架系统(FullyActiveSuspension)。
该系统是由Federspiel.labrosse在1975年发明的[4]。
它主要由一个可控的电液作动器组成。
作动器相当于一个力发生器,可根据车身质量的速度响应等反馈信号,按照一定的控制规律产生作用力。
它可替代被动悬架中的弹簧和减振器,可以任意变更刚度以及阻尼系数。
全主动悬架的最大优点是具有高度的自适应性,可很好地满足不同环境的要求(如不同道路条件和行驶速度等)。
这种装置所要求的控制目标是实现一个最佳的隔振系统,而且不需要对系统作较大的改变.另外又因为该悬架系统还能控制车轮的频率范围(10~15Hz),因其响应特性很快,所以又把该悬架系统称为“快”主动系统。
这种系统功率消耗很大,一般达到l0Kw左右,另外传感器的需用量也很多(如行程传感器、加速度传感器、力传感器及某种情况下的压力传感器等)。
因而尽管全主动悬架的性能非常优越,但由于它的结构相当复杂,而且造价也较为昂贵,一般仅限于在豪华轿车和客车上使用,所以其应用范围较小[5]。
与主动悬架相比,半主动悬架没有力发生器,它通过调节减振器的液力阻力,改善悬架的振动特性,图1.1(c)为两自由度半主动悬架(Semi-ActiveSuspension)。
半主动悬架研究始于1974年美国加州大学戴维斯分校Karnopp的研究工作[6]。
该系统主要由弹性原件与可调阻尼器构成,此可调阻尼器在其力的产生方面非常相似于被动悬架中的阻尼器,但其阻尼系数是根据车身质量的垂直加速度、簧载质量与非簧载质量的相对位移等反馈信号,按照一定的控制规律而瞬态变化的,因此其减振效果又接近全主动悬架。
但由于半主动悬架中弹簧钢度为一定值,所以它的自适应性能要稍逊于全主动悬架。
其中半主动悬架又可以分为阻尼有级可调(On-Off)和阻尼连续可调(Contimuous)两种类型。
阻尼可调减振器主要有两种:
一种是机械式可变阻尼减振器,一般通过电磁阀或步进电机进行有级或无级调节截流孔的开口,改变通流面积来调节阻尼系数。
该方法成本较高,结构复杂,响应快,不易实现细微调节;另一种是通过改变减振器的粘性调节阻尼。
通过使用粘性连续可控得新型减振液(如磁流变液、电流变液)来实现阻尼连续变化,结构简单、制造成本不高、无液压阀的振动冲击和噪声的特点。
电流变液依靠施加一个高压电场来产生电流变效应,电流变液对电场反应迅速,但是在屈服应力、温度范围、塑性粘度和稳定性等方面,磁流变液强于同类电流变液。
从以上分析可以看出,全主动/半主动悬架的性能明显优于被动悬架,而阻尼连续可调的磁流变减振器半主动悬架由于结构简单,可靠性较高,在工作中消耗能量很小,控制易于实现,性能指标与全主动悬架相近,因此受到车辆工程界的广泛重视,应用前景将更为广泛。
1.2磁流变液和磁流变效应
磁流变液(MagnetorheOI。
giCalFluid,简称MRF)是1948年由美国学者RabinowJ发明的一种流变性能可随外界磁场改变而改变的智能材料。
它由磁性微粒、基液及稳定剂三部分组成。
通常磁性微粒的粒径在1~10微米范围内,一般采用铁、钴、镍等磁性材料[7],它是使液体获得磁流变效应的主要成分;基液是作为磁性微粒的载液,要求具有良好的阻燃性和温度稳定性,还应保证不会发生腐蚀和污染作用;而稳定剂是改善磁流变液的沉降稳定性和凝聚稳定性,通常稳定剂具有特殊的分子结构:
一端对磁性颗粒界面能够产生高度的亲和力,吸附于磁性颗粒表面,而另一端是极易分散于载液中的具有适当长度的弹性基团。
一般采用氧化硅胶添加剂或其他表面活化剂。
磁流变液的流变效应目前还没有完全成熟明确的理论,通过显微镜可以观察到:
在没有施加磁场的情况下,磁性颗粒是杂乱无章分布的。
而一旦施加磁场后,磁性微粒沿磁场方向呈链或链束状排列,在磁极之间形成粒子链阻碍流体的正常流动,使流体成为一种具有一定剪切屈服强度的粘塑性体,如图1.2所示。
(a)不加磁场时(b)加磁场时
图1.2磁流变效应示意图
当没有磁场作用时,磁性粒子悬浮于基液中呈现出随机分布状态。
而施加磁场作用后,粒子表面出现极化现象,形成磁偶极子。
磁偶极子在克服热运动的作用下沿着磁场方向结成链状结构。
极化链中各个相邻粒子之间的吸引力随外加磁场强度的增加而增加。
当磁场强度增至临界值时,磁偶极子相互作用超过热运动,使粒子热运动受阻,此时磁流变液呈现固体状态,相邻粒子间的吸引力也达到最大。
磁流变液的屈服应力也是随外加磁场强度的增加而增加的,但当达到某一饱和值后,如果再增加磁场强度,屈服应力不再增加,这时就达到了饱和磁场下的J态屈服应力[8][9][10]。
磁流变效应是磁流变液走向工程应用的基础,那么具有良好性能的磁流变液应满足的以下几点要求:
①磁场作用下有较高的屈服应力;
②零场作用时具有较低的勃度;
③较宽的工作温度范围;
④长期的沉降稳定性和凝聚稳定性;
⑤较好的化学稳定性;
⑥响应时间短;
⑦与密封元件不发生化学作用。
1.3磁流变减振器工作原理
磁流变减振器利用磁流变液的流变特性可受外加磁场控制的特性,实现减振器阻尼系数的可控,从而实现阻尼力的控制。
(a)流动模式(b)剪切模式
图1.3磁流变液减振器的工作模式
汽车磁流变减振器的工作原理一般都基于两种工作模式:
剪切模式和流动模式[11](见图1.3)在流动模式中磁流变液位于两个相对静止的极板之间,磁流变液流经阻尼通道所产生的压力差受外界磁场控制的,从而推动磁流变液流动的活塞所受到的阻尼力就受外界磁场控制;在剪切模式中,磁流变液位于两相对运动的极板之间,外加磁场方向垂直于极板的相对运动方向,磁场强度受控制系统控制,由于不同的磁场可以使磁流变液产生不同的剪切屈服应力,从而极板之间相对运动所产生的阻力就受到了磁场的控制。
将剪切模式和流动模式融为一体就形成混合工作模式,对于这种模式,活塞的移动引起磁流变液的流动与剪切,但由于流动引起的阻尼力比剪切引起的阻尼力大得多,所以只按流动模式计算阻尼力。
1.4汽车悬架控制策略简述
关于车辆悬架系统的振动控制研究与开发是控制领域和车辆动力学领域研究的国际前沿课题。
随着现代控制理论的不断深入发展,有关汽车半主动悬架的控制策略也是越来越多。
自上世纪七十年代以来,典型的控制方法有天棚阻尼控制、PID控制、模糊控制、鲁棒控制、神经网络控制等等。
天棚阻尼控制是karnopp提出的一种关于半主动悬架的控制方法,这是最早提出的一种悬架控制方法,它提出了用开关控制实现近似于理想的“天棚”阻尼的半主动控制方法[12]。
实现该策略所需的测试仪器较少且控制的算法简单,使得对这种算法的研究最多,也是应用最广的。
但是纯粹的天棚阻尼控制策略只是提高了车辆行驶的舒适性,操纵稳定性却没有改善,所以目前的研究重点是改进型的天棚阻尼控制。
经典的PID控制只需要对调节参数根据经验进行在线调整,不需要精确数学模型就可以得到比较满意的结果,虽然它简单容易实现,但是被控对象对参数的变化很敏感,模糊PID控制是该策略的研究方向[13]。
最优控制包含最优预瞄控制、H∞控制和线性最优控制。
最优控制可以改善汽车的行驶平顺性和操纵稳定性,但是它只能对理想的参数模型实现最佳性能[14]。
当汽车参数发生变化到一定程度时,性能将不再最优甚至恶化,系统将变得不稳定,因此它在半主动悬架的控制中用得比较少。
模糊控制无需精确的数学模型就可实现控制,对于半主动悬架这样复杂的非线性系统很有利,此外它能减少控制器存储,从而降低成本缩短控制对象的延时,提高悬架的可靠性[15]。
虽然如此,它的自适应能力较差,控制精度不高。
自适应控制可以分为模型参考自适应控制和自校正自适应控制两类。
它可进行参数识别,使其适应悬架载荷和参数的变化,自动在线调整控制参数,从而降低汽车悬架控制系统的不确定性,确保性能最优[16]。
但是该算法比较复杂,因此对系统的要求高,还存在某些参数具有时变性的缺点。
神经网络控制是一个高度并行的非线性动力系统,它由大量的处理单元组成,具有可学习性和巨量并行性的特点,在车辆悬架系统的振动控制中应用前景良好[17]。
 升级会员
升级会员 