已知单位负反馈系统被控制对象的开环传递函数.docx
《已知单位负反馈系统被控制对象的开环传递函数.docx》由会员分享,可在线阅读,更多相关《已知单位负反馈系统被控制对象的开环传递函数.docx(13页珍藏版)》请在冰豆网上搜索。
已知单位负反馈系统被控制对象的开环传递函数
已知单位负反馈系统被控制对象的开环传递函数
题目:
已知单位负反馈系统被控制对象的开环传递函数
kG(s),ks(0.1s,1)
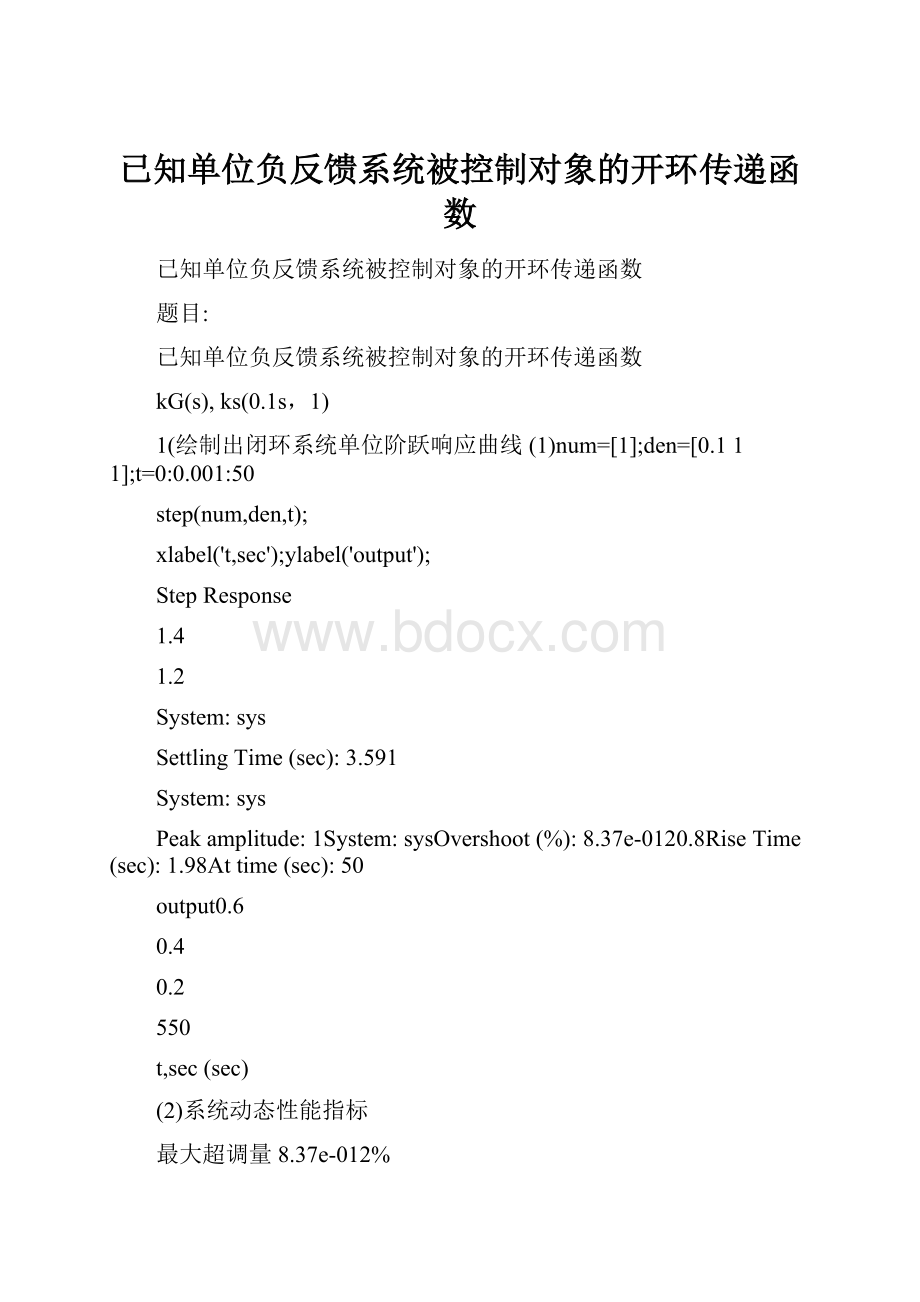
1(绘制出闭环系统单位阶跃响应曲线
(1)num=[1];den=[0.111];t=0:
0.001:
50
step(num,den,t);
xlabel('t,sec');ylabel('output');
StepResponse
1.4
1.2
System:
sys
SettlingTime(sec):
3.591
System:
sys
Peakamplitude:
1System:
sysOvershoot(%):
8.37e-0120.8RiseTime(sec):
1.98Attime(sec):
50
output0.6
0.4
0.2
550
t,sec(sec)
(2)系统动态性能指标
最大超调量8.37e-012%
上升时间1.98s
调节时间3.59s
当阻尼比>1时,由图可知相应的单位阶跃响应是非周期的趋于稳态输出.
2.绘制根轨迹图
functionprog3
num=[1];
den=[0.110];
kaihuan=tf(num,den);
[n,d]=cloop(num,den);
bihuan=tf(n,d);
rlocus(n,d);
RootLocus
4
3System:
sysGain:
2.58Pole:
-5+3.29iSystem:
sysSystem:
sys2Damping:
0.835Gain:
0.582Gain:
0.38Overshoot(%):
0.847Pole:
-8.03Pole:
-1.65Frequency(rad/sec):
5.99Damping:
1Damping:
11Overshoot(%):
0Overshoot(%):
0Frequency(rad/sec):
8.03Frequency(rad/sec):
1.65
0
ImaginaryAxis-1System:
sysGain:
2.54Pole:
-5-3.22i-2Damping:
0.841Overshoot(%):
0.758Frequency(rad/sec):
5.95-3
-4-9-8-7-6-5-4-3-2-10
RealAxis
并分别取Kc值等于0.38、0.582、2.54、2.58时,绘出此时的单位阶跃响应曲线,分别如下:
选择K=0.38时,利用单位阶跃响应观察系统动态性能Kc=0.38,num=[0.38];den=[0.1110.38];t=0:
0.001:
10
step(num,den,t);
xlabel('t,sec');ylabel('output');
StepResponse
1.4
1.2
System:
sysSystem:
sysFinalValue:
1SettlingTime(sec):
6.151
System:
sys
Peakamplitude:
1.01System:
sysOvershoot(%):
1.070.8RiseTime(sec):
3.92Attime(sec):
8.57output0.6
0.4
0.2
0012345678910
t,sec(sec)
选择K=0.582时,利用单位阶跃响应观察系统动态性能
Kc=0.582,num=[0.582;den=[0.110582];t=0:
0.001:
10
step(num,den,t);
xlabel('t,sec');ylabel('output');
StepResponse
1
System:
sysSystem:
sysFinalValue:
10.9SettlingTime(sec):
6.41System:
sys
RiseTime(sec):
3.550.8
0.7
0.6
0.5output
0.4
0.3
0.2
0.1
0012345678910
t,sec(sec)
选择K=02.54时,利用单位阶跃响应观察系统动态性能
Kc=2.54,num=[2.54];den=[0.112.54];t=0:
0.001:
10step(num,den,t);
xlabel('t,sec');ylabel('output');
StepResponse
1.4
1.2
System:
sysSystem:
sysFinalValue:
1SettlingTime(sec):
1.141
System:
sys
Peakamplitude:
1System:
sysOvershoot(%):
1.63e-0090.8RiseTime(sec):
0.659Attime(sec):
4.97
output0.6
0.4
0.2
0012345678910
t,sec(sec)
K变化对根轨迹的影响:
在根轨迹图上,随着K值从0的变化,系统是稳定的;由根轨,,cc
迹的对称性,随着K值从0?
-?
的变化,系统是不稳定的.c
3.K=5时对系统进行频域分析,绘制Nyquist图以及Bode图,确定系统的稳定性。
%discribethesystem
t=0:
0.01:
100;
k=5;
num=[k];
den1=[10];
den2=[0.11];
den=conv(den1,den2);
kaihuan=tf(num,den)
[n,d]=cloop(num,den);
bihuan=tf(n,d)
figure
(1)
nyquist(kaihuan)
figure
(2)
margin(kaihuan),grid;
[h,r,wx,wc]=margin(kaihuan);
NyquistDiagram
8
6
4
System:
kaihuan2PhaseMargin(deg):
65.5
DelayMargin(sec):
0.251
Atfrequency(rad/sec):
4.550ClosedLoopStable?
YesImaginaryAxis-2
-4
System:
kaihuan-6Peakgain(dB):
268
Frequency(rad/sec):
2e-013-8-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.10
RealAxis
BodeDiagram
Gm=InfdB(atInfrad/sec),Pm=65.5deg(at4.55rad/sec)50
0
-50Magnitude(dB)
-100-90
-135
Phase(deg)
-180-
Frequency(rad/sec)
由图可知系统稳定的。
其频域指标是:
o相角裕度:
,65.50
幅值裕度:
h=lnfdB
,4.55rad/s截至频率:
c
由此可得,系统稳定,不需要校正。
4.设计串联校正,满足要求的性能指标。
(1)因为要求相角裕度大于等于45度,静态速度误差系数Kv大于等于100
本题采用频率滞后校正,校正程序和伯德图如下:
functionjiaozheng
t=0:
0.01:
5
num=[100];
den1=[10];
den2=[0.11];
den=conv(den1,den2);
kaihuan=tf(num,den)
[n,d]=cloop(num,den);
bihuan=tf(n,d);
wcc=5;
[h_wcc,r_wcc]=bode(kaihuan,wcc);h_wcc=20*log10(h_wcc);
b=10^(-h_wcc/20);
T=10/wcc/b;
gc=tf([b*T1],[T1]);
ggc=gc*kaihuan;
figure
(1);
sys1=feedback(kaihuan,1);sys2=feedback(ggc,1);
step(sys1,t);gridon;holdon;figure
(2);
step(sys2,t);gridon;holdon;b,T,
figure(3)
margin(ggc),grid;
disp('flag=0,Éè?
ÆÎ?
Íê?
É?
?
?
ÌÐø?
øÐÐ')disp('flag~=0,Éè?
ÆÒÑ?
Íê?
É?
?
ÍË?
öÉè?
Æ')flag=input('ÇëÊäÈëflagµÄÊýÖµ,flag=')ifisempty(flag)
flag=1;
end;
<输入:
wcc=5,满足要求,退出时输入:
flag=1,如不满足要求,则输入flag=不为1的数
重新输入wcc>
100100校正前的函数:
G0(s)==s(0.1s,1)0.1s^2,s校正前系统图形:
StepResponse1.8
1.6
1.4
1.2
1
0.8Amplitude
0.6
0.4
0.2
000.511.522.533.544.55
Time(sec)
b=0.0559
T=35.7771
传递函数:
将b,T的值代入
1.9999s,10.0559*35.7771s,1Gc(s)==35.7771s,135.7771s,1校正后的函数:
1.9999s,1100100(1.9999s,1)Gc(s)*G0(s)=*=s(0.1s,1)s(0.1s,1)(35.7771s,1)35.7771s,1
校正后系统图形:
StepResponse1.4
1.2
1
0.8
Amplitude0.6
0.4
0.2
000.511.522.533.544.55
Time(sec)
BodeDiagram
Gm=InfdB(atInfrad/sec),Pm=58deg(at5.02rad/sec)100
50
0
Magnitude(dB)-50
-100-90
-135
Phase(deg)
-180-3-2-0
Frequency(rad/sec)
可以看到相角裕度是58?
。
(2)因为要求相角裕度大于等于45度,静态速度误差系数Kv大于等于200,系统校正
后,幅值穿越频率大于等于50.本题采用频率滞后校正,校正程序和伯德图如下:
functionjiaozheng
t=0:
0.01:
5
num=[200];
den1=[10];
den2=[0.11];
den=conv(den1,den2);
kaihuan=tf(num,den)
[n,d]=cloop(num,den);
bihuan=tf(n,d);
wcc=150;
[h_wcc,r_wcc]=bode(kaihuan,wcc);h_wcc=20*log10(h_wcc);b=10^(-h_wcc/20);
T=10/wcc/b;
gc=tf([b*T1],[T1]);
ggc=gc*kaihuan;
figure
(1);
sys1=feedback(kaihuan,1);sys2=feedback(ggc,1);
step(sys1,t);gridon;holdon;figure
(2);
step(sys2,t);gridon;holdon;b,T,
figure(3)
margin(ggc),grid;
disp('flag=0,Éè?
ÆÎ?
Íê?
É?
?
?
ÌÐø?
øÐÐ')disp('flag~=0,Éè?
ÆÒÑ?
Íê?
É?
?
ÍË?
öÉè?
Æ')flag=input('ÇëÊäÈëflagµÄÊýÖµ,flag=')ifisempty(flag)
flag=1;
end;
<输入:
wcc=150(大于50范围内自选),满足要求,退出时输入:
flag=1,如不满足要求,则
输入flag=不为1的数重新输入wcc>
200200校正前的函数:
G0(s)==s(0.1s,1)0.1s^2,s
校正前系统图形:
StepResponse1.8
1.6
1.4
1.2
1
0.8Amplitude
0.6
0.4
0.2
000.511.522.533.544.55
Time(sec)
b=11.2750T=0.0059
传递函数:
将b,T的值代入
11.2750*0.0059s,10.06652s,1Gc(s)==0.0059s,10.0059s,1校正后的函数:
2000.06652s,1200(0.06652s,1)Gc(s)*G0(s)=*=s(0.1s,1)s(0.1s,1)(0.0059s,1)0.0059s,1
校正后系统图形:
StepResponse1.4
1.2
1
0.8
Amplitude0.6
0.4
0.2
000.511.522.533.544.55
Time(sec)
BodeDiagram
Gm=InfdB(atInfrad/sec),Pm=54deg(at112rad/sec)50
0
-50Magnitude(dB)
-100-90
-135
Phase(deg)
-
Frequency(rad/sec)
可以看到相角裕度是54?
。
对校正后系统的分析
StepResponse
1.4System:
sys2
Peakamplitude:
1.14
Overshoot(%):
13.5
Attime(sec):
0.031.2
System:
sys2
FinalValue:
11System:
sys2
SettlingTime(sec):
0.0459
System:
sys20.8RiseTime(sec):
0.0143
Amplitude0.6
0.4
0.2
000.511.522.533.544.55
Time(sec)
0.03,,0.0143,,0.0459tststsprs
%,13.5%
BodeDiagram
Gm=InfdB(atInfrad/sec),Pm=54deg(at112rad/sec)50
0
-50Magnitude(dB)
-100-90
-135
Phase(deg)
-
Frequency(rad/sec)
oo相角裕度:
,54,450
截至频率:
,112rad/s,,50rad/s
校正装置对性能指标的影响:
校正装置相当于增加了闭环零极点。
闭环零点会减小系统的阻尼比,从而使峰值时间减小,响应速度加快,但会使超调量增大,调节时间加长。
这种影响会随着零点接近虚轴而加剧。
闭环极点对系统的影响则相反,并且随着极点接近实轴而加剧。
通过选择适当的主导极点可使校正后各个性能指标都有所改善,通过指定不同的主导极点位置,可得到所要求的时域性能指标。
性能描述:
校正后,相角裕度都有所增加。
从而使系统的稳定性增强。
对照校正前的图形,可以看出系统的动态性能得到了改善,且读出数据与要求对比:
(1)速
oo,1,,58,45度误差系数是,相角裕度是,截至频率,符合Kv,100s,,5.02rad/s
oo,1,,54,45设计要求。
(2)速度误差系数是,相角裕度是,截至频率Kv,200s
,符合设计要求。
,112rad/s,,50rad/s
五、设计心得:
使用MATLAB的过程中遇到了很多问题,主要是命令格式这些小细节,有些同学在开始设计之前,先对MATLAB进行熟悉,这样就避免了设计过程中的不必要的时间浪费,虽然表面上貌似浪费了时间,但是实际上却让整个过程流畅,所谓“磨刀不误砍柴工”。
设计过程中,最重要的是思路清晰,先把过程列个提纲,然后一步一步的编程校验,这样不仅不易出错,而且容易阅读。
程序出错之后不要慌,要好好检查,先检查输入的程序内容有没有错误,如果检查没错误,可能是标点出了错误,因为中文标点和英文标点有些东西看起来一样,但是在MATLAB程序看来是不同的,这些小细节要好好主意,不然虽然程序和思路没有问题,但是结果出不来,而且不易检查。
通过这次学科设计,使我对自动化控制原理有了更深的理解,在设计过程中,通过查资料,问同学,使我的专业知识得到进一步的巩固,使我受益匪浅。
 升级会员
升级会员 