线性系统的时域分析法_精品文档.doc
《线性系统的时域分析法_精品文档.doc》由会员分享,可在线阅读,更多相关《线性系统的时域分析法_精品文档.doc(64页珍藏版)》请在冰豆网上搜索。
第三章线性系统的时域分析法
●时域分析法在经典控制理论中的地位和作用
时域分析法是三大分析方法之一,在时域中研究问题,重点讨论过渡过程的响应形式。
l时域分析法的特点:
1).直观、精确。
2).比较烦琐。
§3.1 系统时间响应的性能指标
1.典型输入
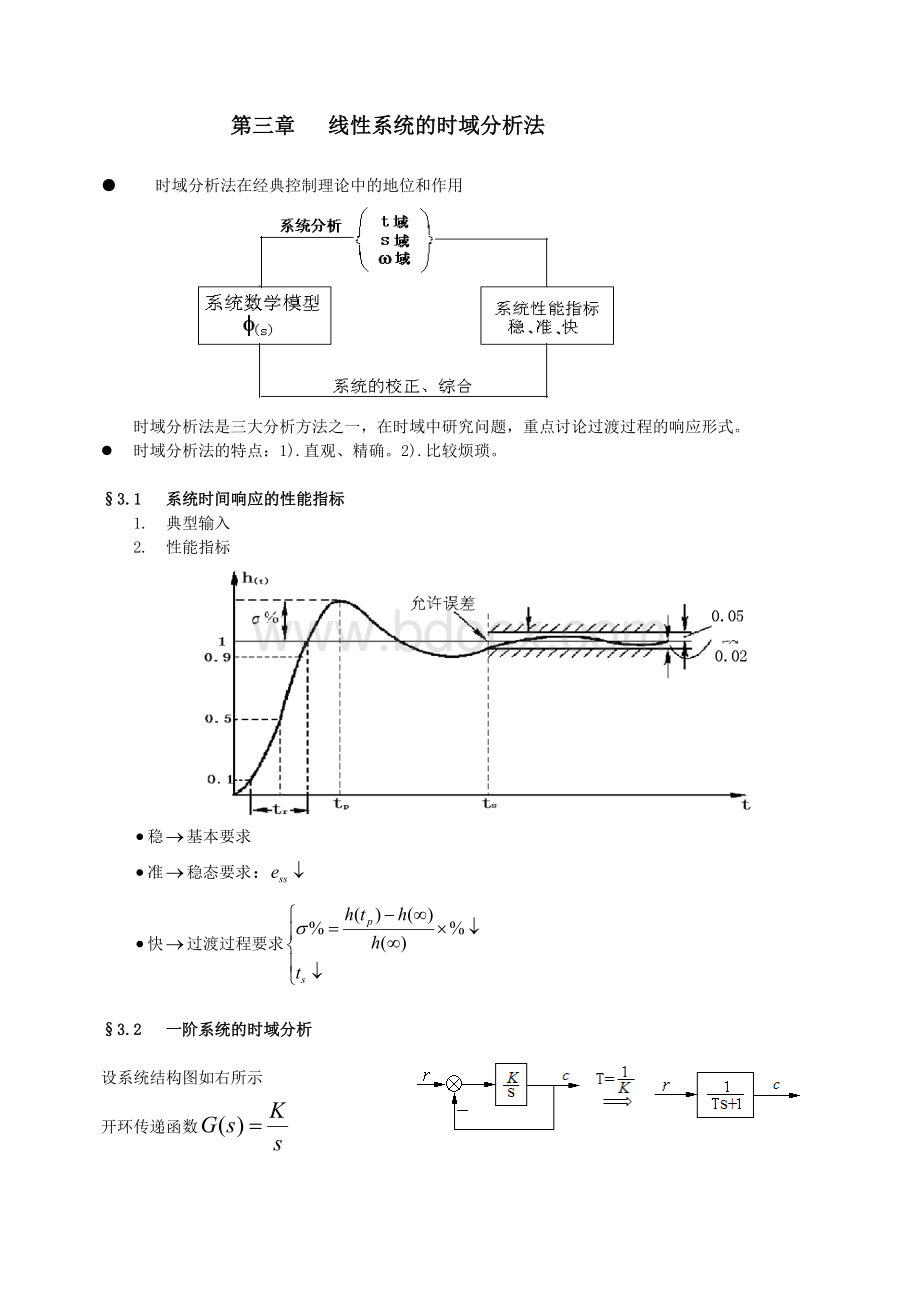
2.性能指标
稳基本要求
准稳态要求
快过渡过程要求
§3.2 一阶系统的时域分析
设系统结构图如右所示
开环传递函数
闭环传递函数
依特点及定义有:
一阶系统特征根分布与时域响应的关系:
例1已知系统结构图如右
其中:
加上环节,使减小为原来的0.1倍,且总放大倍数不变,求
解:
依题意,要使闭环系统,且闭环增益=10。
令联立解出
例2已知某单位反馈系统的单位阶跃响应为
求
(1).闭环传递函数;
(2).单位脉冲响应;(3).开环传递函数。
解:
一阶系统分析 开环传递函数
闭环传递函数
●线性系统重要特性:
系统对输入信号的响应,等于系统对该信号响应的
§3.3二阶系统的时域分析
1.二阶系统标准形式及分类
1)二阶系统典型结构及标准形式:
典型结构如右
=
标准形式:
2)二阶系统分类:
负阻尼系统
零阻尼系统
欠阻尼系统
临阻尼系统
过阻尼系统
2.欠阻尼二阶系统分析:
⑴二阶欠阻尼系统极点的两种表示:
直角坐标表示:
“极”坐标表示:
⑵二阶欠阻尼系统单位阶跃响应
(3)指标计算:
由得:
即:
依定义,应有
)
代入式:
由
(1)依定义忽略正弦因子影响,以包括线进入误差带的时刻为
有:
(3)极点分布与响应间关系
例系统结构图如右,试求
1)当时系统的动态性能;
2)使系统阻尼比的值;
3)当时系统的动态性能。
解:
当时:
%=16.3%
%=5%
例2某典型欠阻尼二阶系统
要求
试确定系统极点的允许范围
解:
要求等价为:
例3系统如下图示
时的响应为,求
解:
依题可知
系统极点分布:
3.过阻尼二阶系统性能估算:
◆
◆找出与之间的关系:
比较:
u求阶跃响应:
求表达式:
依定义:
解:
)
u过阻尼二阶系统求思路:
缺例题:
例:
u注:
1)当时,欠阻尼二阶系统—-近似用一阶系统代替
2)过阻尼二阶系统零极点分布与动态性能之间的关系
i.极点对影响较大――主导极点
ii.与值、值有关()
3)系统相当于两个惯性环节串联时的特性
欠阻尼二阶系统动态性能计算复习:
⑴ 极点的表示方法:
⑵ 动态性能计算公式:
⑶ 变化时动态性能的变化规律
举例:
系统如右图示,
求分别取值为1500,200,13.5时的动态性能:
解:
开环传递函数
开环增益
1500
86.2
0.037
52%
0.2
0.0046
200
31.6
0.12
13%
0.2
0.0345
13.5
8.22
0
1.45
0.5111
响应曲线见右下图。
3单位斜坡响应与讨论:
误差传递函数:
(计算列表见上页表)
结论:
1.系统的动态性能,稳态性能均与系统结构参数()有关
2.性能之间对参数的要求有时是有矛盾的
必须折中,使各方面要求满足,若兼顾不到,
则需校正
三 改善二阶系统动态性能的方法
系统(如火炮系统)存在超调的原因
1.比例加微分控制——提前控制
改善系统性能的原理(定性分析)见下页图以说明之。
2.测速反馈控制——增加阻尼
(6)二阶系统性能的改善
带闭环零点的欠阻尼二阶系统动态性能计算:
如右系统:
式中:
响应:
其中:
指标计算:
开环增益K对系统性能的影响
如右系统:
开环传函:
开环增益:
闭环传函:
特征根:
特征参数:
动态指标:
误差传函:
稳态误差:
*注时(讲原理)
改善二阶系统动态性能的方法举例
原系统(a)
测速反馈(b)
比例加微分(c)
问题讨论:
1开环增益会影响系统的性能指标
Ø改变指标的原因:
开环增益
闭环增益
变化→特征多项式系数变化→特征根变化→变化→性能变化
Ø开环增益变化对性能的改善是有限的,指标对的要求往往是矛盾的只能采取折中方案,兼顾不同的要求。
“快”与“准”两项指标相矛盾
2.闭环增益不改变系统性能指标,只改变输出的比例尺度
3.系统的性能不仅取决于闭环极点,而且与闭零点有关。
前者决定响应的模态,后者决定模态的加权系数。
4.不同输入下稳态误差分析
⒌比例—微分控制的原理——提前控制(图示)
⒍测速反馈改善性能的原理——增加阻尼(从结构图解释)
⒎两种方案
比例—微分 测速反馈
1)对噪声敏感;信号弱,需放大; 有滤波作用,信号强,不需放大;
2)较简单,成本低; 复杂,成本高;
3)不改变开环增益,不改变; 改变开环增益,
4)引入一个闭零点()。
不引入闭零点。
⒏附加开环零点的作用:
——原系统与测速反馈系统相比较
原系统测速反馈系统
附加开环零点,改变了闭环极点的位置(前左)增加了阻尼,改善了指标。
⒐附加闭环零点的作用——测速反馈系统与比例—微分控制系统相比较
⒑附加闭环极点的作用
附加闭环点的作用:
当原系统阻尼较时适用。
§3.4高阶系统的时域分析
1.高阶系统的阶跃响应
高阶系统闭环传递函数一般可表示为
2.闭环主导极点,偶极子
主导极点:
距虚轴较近,对过渡过程影响较大的闭环极点。
(三倍距离
偶极子:
靠得很近,作用可以相互抵消的闭环零极点对。
(距离)
3.高阶系统性能估算——零点、极点法
估算思路:
略去非主导极点和偶极子,用主导零极点对应的低阶系统估算高阶系统性能指标。
步骤:
1)由——闭环零极点图;
2)略去非主导零、极点(3倍于主导极点距虚轴的距离);
3)略去不非常靠近原点的偶极子;
4)利用教材表,用相应的公式进行动态性能估算。
例:
系统主导零、极点分布如右图示,计算其性能指标
解:
按第二行对应公式:
附加零、极点对二阶欠阻尼系统的影响:
(定性分析)
附加零点:
附加极点:
结论
(1).附加点:
(2).附加的零(极)点越靠近原点,对系统的影响越大。
欠阻尼二阶系统附加零极点后动态特性的计算(例)
零
极
点
分
布
图
原振荡二阶系统
附加一个零点
附加一个极点
附加一个零点,一个极点
性
能
指
标
计
算
公
式
性
能
计
算
=
=
结论:
⑴附加点:
⑵附加的零(极)点越靠近原点,对系统的影响越大。
§3.5线性系统的稳定性分析
1.稳定的概念及定义
系统在扰动作用下偏离了原来的平衡位置,当扰动消除后,系统能回到原来的平衡位置,则称系统稳定;否则系统不稳定。
●对线性定常系统,若其脉冲响应收敛,则系统稳定,否则不稳定
●线性定常若稳定,则原点是其唯一的平衡点,且系统一定在大
范围内渐进稳定。
2.系统稳定的充要条件——闭环极点全部落在虚轴左边
设闭环传递函数
必要性:
系统稳定
之间线性无关。
不可能在一个时段上恒为0
充分性:
(由上反向说明即可得证)
3.系统的稳定性判据
高阶方程求解不易,用求特征根方法判定稳定性不现实。
设系统特征方程为:
(1).李一戚(必要性)判据:
说明:
设有
当全部根在左半s平面时,系数只能越加越大,不可能出现负或零。
例1——不稳
——不稳(缺3次项)
——可能稳定
(2).劳斯判据(充要性)判据[见书劳斯表]
例2:
判定稳定性及在右半平面根个数
解:
劳斯表
变号两次,有两个闭极点在右半s平面。
l劳斯表第一列元素全为正时,系统稳定
l劳斯表第一列元素的变号次数=右半s平面闭环根的个数
l特殊情况的处理
某行第一列元素为0,该行元素不全为0时——乘因子
某行元素全为0时:
——用上行构成的辅助方程,求导后的新
方程系数代入。
例3判定右半s平面中闭环根的个数
解:
劳斯表
变号两次,有两个正根,实际上
例4
试求系统在右半s平面的根数及虚根值。
解:
可见
(1).右半s平面无根
(2).虚根值:
由辅助方程
(3).由系数看,偶次项系数和=奇次项系数和,是根
劳斯表的应用
①判定稳定性,确定正根的个数
②确定是系统稳定的参数取值范围
例I 系统如右,确定使系统稳定的范围
解:
系统开环增益
综合之
稳定范围为 (阴影部分)
II若,确定使系统闭环极点全部落在左边时的范围
解:
列劳斯表:
综合之
即
例:
已知某单位反馈系统,其开环零极点如下图示,问:
闭环系
统是否可以稳定?
确定的范围。
解:
依题,系统结构图为:
并且有:
列劳斯表:
问题讨论:
①系统稳定性是其自身的属性,与输入类型,形式无关。
②闭环稳定与否,只取决于闭环极点,与闭环零点无关。
③闭环系统的稳定性
 升级会员
升级会员 