15机电高起专华北电力大学继续教育学院.docx
《15机电高起专华北电力大学继续教育学院.docx》由会员分享,可在线阅读,更多相关《15机电高起专华北电力大学继续教育学院.docx(21页珍藏版)》请在冰豆网上搜索。
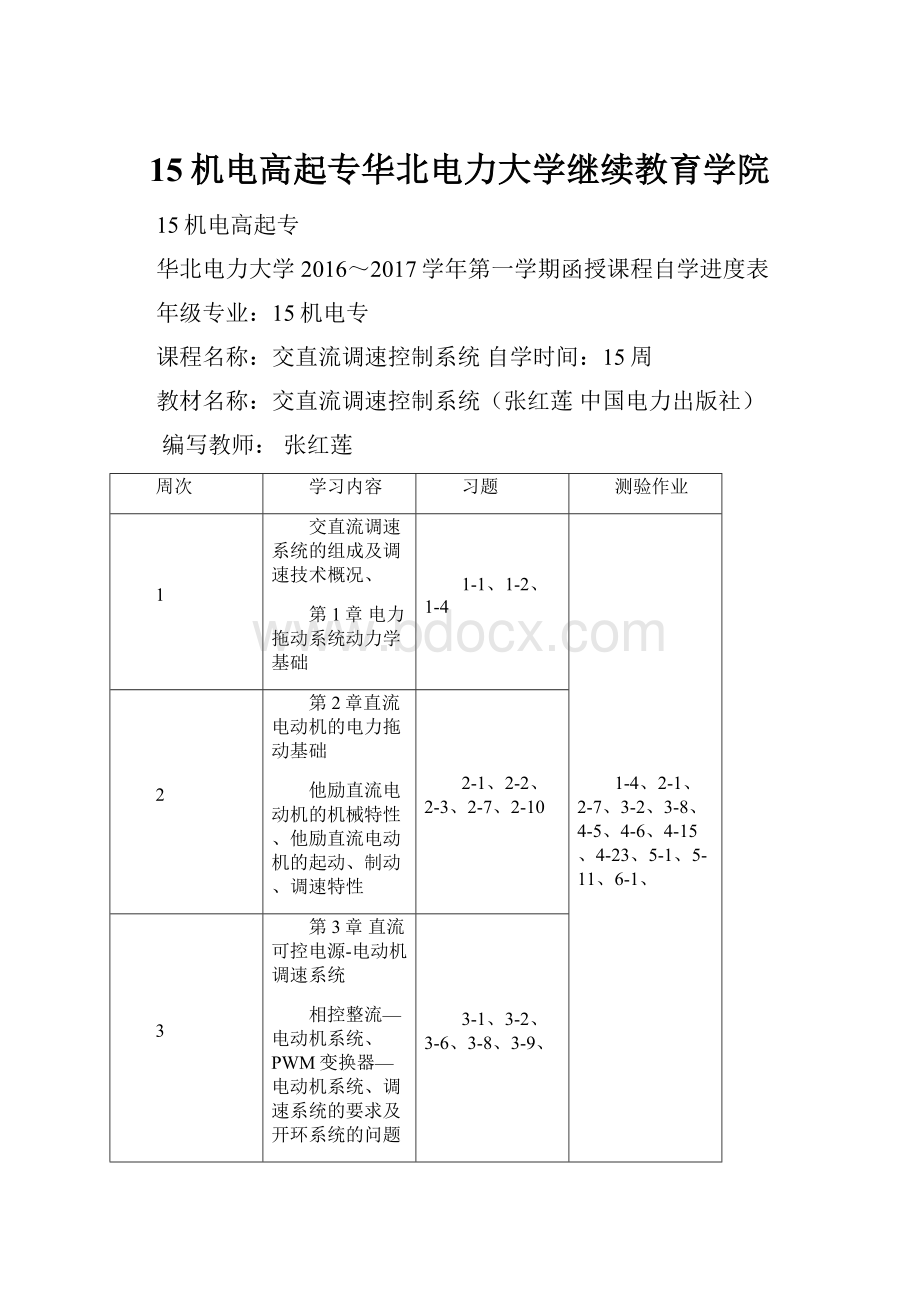
15机电高起专华北电力大学继续教育学院
15机电高起专
华北电力大学2016~2017学年第一学期函授课程自学进度表
年级专业:
15机电专
课程名称:
交直流调速控制系统自学时间:
15周
教材名称:
交直流调速控制系统(张红莲中国电力出版社)
编写教师:
张红莲
周次
学习内容
习题
测验作业
1
交直流调速系统的组成及调速技术概况、
第1章电力拖动系统动力学基础
1-1、1-2、1-4
1-4、2-1、2-7、3-2、3-8、4-5、4-6、4-15、4-23、5-1、5-11、6-1、
2
第2章直流电动机的电力拖动基础
他励直流电动机的机械特性、他励直流电动机的起动、制动、调速特性
2-1、2-2、2-3、2-7、2-10
3
第3章直流可控电源-电动机调速系统
相控整流—电动机系统、PWM变换器—电动机系统、调速系统的要求及开环系统的问题
3-1、3-2、3-6、3-8、3-9、
4
第4章直流电动机闭环调速控制系统
转速单闭环调速系统的组成及静特性、稳态参数计算
4-1、4-3、4-4
5
转速单闭环调速系统的动态分析、稳定条件
4-5、4-6
6
无静差直流调速系统、稳态参数计算、电流截止负反馈
4-8
7
双闭环调速系统的组成及静特性、动态数学模型、抗扰性能分析
4-9、4-10、4-13、4-15、
8
调节器的工程设计方法
(基本思路、参数与性能指标的关系、非典型系统的典型化)
4-18、4-19、4-21、
9
按工程设计方法设计双闭环调速系统的调节器
电流调节器和转速调节器的设计
4-22、4-23
10
第5章异步电动机的电力拖动基础
异步电动机的机械特性(转矩表达式、固有和人为机械特性的曲线)
5-1、5-3、5-4
11
三相异步电动机的起动、制动、调速特性
5-11、5-12、5-13
12
第6章异步电动机的调速控制系统
变压变频调速的基本控制方式、变频装置的基本类型
6-1、6-2、6-4、6-5
13
变压变频调速中的脉宽调制(着重掌握正弦脉宽调制(SPWM)逆变器的工作原理、控制模式及其实现方法)
6-6、6-7
14
基于稳态模型的调速系统的组成、基于动态模型的调速系统(矢量控制的基本思路)
7-1、7-2、7-4
15
总复习
注:
面授时将测验作业交任课教师批改。
其成绩占该课程总成绩的10%。
华北电力大学2016~2017学年第一学期函授课程自学进度表
年级专业:
15机电专
课程名称:
控制工程基础自学时间:
15周
教材名称:
机械控制工程基础(朱骥北)编写教师:
张红莲
周次
学习内容
习题
作业
1
第一章绪论,自动控制系统的组成、工作原理、分类,附录拉氏变换和定理及反变换
1-1、1-2、1-3
2-8、2-9、2-10、2-12、3-3、3-9、3-11、4-1、4-3、4-5
(2)、4-6、4-7、5-1、5-2、5-5
2
第二章物理系统的数学模型及传递函数
数学模型及建立方法、传递函数的特性及求取
2-1、2-4
3
典型环节(比例,惯性,积分,微分,振荡,延迟等环节)的传递函数、
2-6、2-8、2-9、
4
系统的方框图及其联接(串联,并联,反馈)、方框图的化简,物理系统的传递函数
2-10、2-12
5
第三章瞬态响应及误差分析
一阶系统的时间响应(阶跃响应,脉冲响应),注意:
时间常数对系统响应的影响。
3-1、3-2
6
二阶系统的时间响应(阶跃响应,脉冲响应),注意:
二阶系统的阻尼比对系统响应的影响。
3-3、3-4、3-7
7
瞬态响应的性能指标(上升时间、峰值时间、超调量的定义和计算),稳态误差的定义、分析与计算
3-9、3-10、3-11、3-13
8
第四章频率特性分析
频率特性的基本概念及其求法,物理意义和数学本质,典型环节(比例,惯性,积分,微分,振荡,延迟,一阶微分,二阶微分等环节)的频率特性
4-1、4-2
9
绘制系统的开环频率特性的幅相曲线(即奈奎斯特曲线)、对数频率特性曲线(包括对数幅频特性和相频特性)(即伯德图)。
4-3、4-5
10
最小相位系统和非最小相位系统,根据对数频率特性曲线确定系统的传递函数。
4-6、4-7
11
频域性能指标的定义;明确频域性能指标与时域性能指标的关系。
12
第五章系统稳定性,稳定的概念和充分必要条件,劳斯-胡尔维茨稳定判据
5-1、5-2
13
奈奎斯特稳定判据及应用,要求利用奈奎斯特曲线和伯德图判断系统的稳定性,注意是否含有s=0的极点,以及是否为最小系统。
5-3、5-4
14
稳定裕量的概念,系统的稳定程度与稳定裕量的关系,相角裕量和幅值裕量的计算。
5-7
15
控制工程基础总复习
注:
面授时将作业交任课教师批改。
其成绩占该课程总成绩的10%。
华北电力大学2016~2017学年第一学期函授课程自学进度表
年级专业:
15机电专
课程名称:
微型计算机原理与应用自学时间:
15周
教材名称:
单片机原理及应用(韩庆瑶电力社)
编写教师:
唐中燕
周次
学习内容
习题
作业
1
了解单片机,2学时
第二章
二、三、四
第三章
一、二
第四章
一、
二(1、2、3、4、5)
第五章
(1、2、3、4、5、6、7、8、12)
第六章
(1、2、3、4、5、6、7、8、9、10、11)
2
微机基本概念,4学时
第一章习题
3
MCS-51系列单片机的硬件结构(单片机的主要功能和内部结构、单片机的外部引脚),4学时
第二章习题
4
MCS-51系列单片机的硬件结构(单片机的存储器),4学时
第二章习题
5
单片机的指令系统和编程(寻址方式、数据传送指令),4学时
第三章习题
6
单片机的指令系统和编程(算术操作指令),4学时
第三章习题
7
单片机的指令系统和编程(逻辑运算指令),4学时
第三章习题
8
单片机的指令系统和编程(程序转移指令),4学时
第三章习题
9
单片机的指令系统和编程(位操作指令、伪指令、单片机系统的开发工具),6学时
第三章习题
10
单片机的指令系统和编程(内存块移动和数据排序的程序),4学时
习题四
11
单片机技术应用(单片机并行输入输出接口),4学时
习题五
12
单片机技术应用(单片机定时器/计数器),6学时
习题五
13
单片机技术应用(单片机中断系统),6学时
习题五
14
单片机技术应用(单片机存储器的扩展),4学时
习题六
15
单片机技术应用(单片机输入输出接口的扩展),4学时
习题七
注:
面授时将作业交任课教师批改。
其成绩占该课程总成绩的10%。
华北电力大学2016~2017学年第一学期函授课程自学进度表
年级专业:
15机电专
课程名称:
专业课程设计(机电)自学时间:
15周
教材名称:
机电一体化系统设计课程设计指导书(尹志强)
编写教师:
郑海明
周次
学习内容
习题
作业
1
绪论
从下面2个设计题目中任选一个
2
课程设计的一般过程与要点
3
机电一体化系统机械部件设计
4
5
机电一体化系统进给伺服系统设计
6
7
机电一体化系统控制系统及其模块电路设计
8
9
10
机电一体化系统设计实例分析
11
12
机电一体化系统设计作业(从下面2个设计题目中任选一个并完成)
13
14
15
注:
面授时将作业交任课教师批改。
其成绩占该课程总成绩的10%。
设计题目一:
CA6140普通车床微机数控化改造
2.设计内容:
2.1数控改造总体方案设计;
2.2机床进给系统机械结构设计与计算(单轴);
2.3微机数控系统选型设计;
2.4微机控制系统软件设计;
3.机械系统结构设计要求:
3.1采用滚动螺旋副、滚动导轨
3.2采用消除间隙齿轮传动结构
3.3采用反应式步进电机
4.控制系统功能要求:
4.1能实现零件程序的存储及控制程序的存储
4.2能实现零件程序的编辑调试、机床自动回零、点动运行、单段运行、自动运行。
5.控制系统软件设计要求:
5.1编制主控制程序
5.2编制带插补的步进电机正反转控制程序;
6.设计计算说明书要求:
6.1总体方案论证
6.2滚动螺旋副选型计算与验算、滚动导轨结构设计计算
6.3步进电机选型设计计算
6.4控制系统功能芯片选型说明
6.5控制软件流程
7.已知参数:
①CA6140普通车床微机数控化改造
7.1床身上最大加工直径Φ400mm,床鞍上最大加工直径Φ210mm
7.2最大加工工件长度1000mm
7.3刀架纵溜板的重量700N
7.4刀架纵向快进速度2.4m/min
7.5刀架纵向切削最大速度0.5m/min
7.6主电机功率7.5KW(4KW)
7.7启动加速时间30ms
7.8刀架纵向定位精度±0.015mm
设计题目二:
全自动洗衣机控制系统的设计
洗衣机的工作流程由进水,洗衣,排水和脱水四个过程组成。
在半自动洗衣机中,这四个过程分别用相应的按扭开关来控制。
全自动洗衣机这四个过程可做到全自动依次运行,直至洗衣结束。
2.2设备控制要求
全自动洗衣机控制要求是能实现”正常运行“和”强制停止“两种控制要求。
⑴按下启动按扭,开始进水直到水满(即水位达到高水位)时停止进水开始洗涤正转
⑵洗涤时,正转30秒,停两秒,然后反转30秒,停2秒
⑶如此循环5次,总共320秒开始排水
⑷水位下降到低水位时开始脱水并继续排水,脱水30秒
⑸开始清洗,重复
(1)到(4),清洗两遍
⑹清洗完成,报警3秒并自动停机
⑺若按下排水按扭可以实现手动排水
⑻若按下停车按扭,可实现手动停止进水,排水脱水及报警
要求完成相应的硬件电路和控制软件设计
华北电力大学2016—2017学年第一学期函授课程自学进度表
年级专业:
15机电专
课程名称:
数控技术及应用自学时间:
15周
教材名称:
数控机床原理与应用(范孝良电力社)
编写教师:
康文利
周次
学习内容
习题
作业
1
第一章数控技术概论
1-3、1-4
1-5
1-3
1-5
2-3
2-19
2-20
3-7
3-9
3-10
4-1
5-3
5-6
5-8
6-3
6-4
7-4
7-7
2
第二章数控加工的程序编制基础
数控编程的基本概念;数控编程中的常用指令:
2-3、2-42-5、2-82-15
3
数控编程中的工艺处理;数学处理:
直线、圆弧的数学处理、非圆曲线节点坐标计算。
2-10,2-11
2-21,2-23
4
第三章数控加工编程方法
数控车床编程中的工艺处理;数控车床的编程特点;数控车床常用指令;车削常用固定循环指令
3-1、3-2
5
数控车削编程实例(FANUC系统)
数控铣削编程中的工艺处理;数控铣床的编程特点;数控铣床常用编程指令;
3-4
3-5
3-6
6
铣削编程实例(FANUC系统);
孔加工固定循环指令点;孔加工编程实例
3-12
7
加工中心编程中的工艺处理;加工中心编程特点;加工中心编程指令;加工中心编程实例
3-11
8
第四章计算机数控装置
计算机数字控制装置的硬件结构;
多微处理器结构
4-1、4-24-5、4-6
9
第五章数控机床的控制原理
插补的基本概念;逐点比较法;
5-1、5-25-4,
10
DDA法直线插补;提高数字积分法插补质量的措施
5-6、5-7
5-9
11
直线函数法
12
第六章数控机床的伺服系统
步进电机的工作原理;步进电机特性;步进电机环形分配器
6-1、6-2
6-3、6-4
13
第七章数控机床的检测装置
位置检测装置分类;感应同步器;旋转变压器
7-1、7-2
7-3、7-4
14
编码器;光栅
7-5、7-7
15
总复习
注:
面授时将作业交任课教师批改。
其成绩占该课程总成绩的10%。
华北电力大学2016~2017学年第一学期函授课程自学进度表
年级专业:
15机电专
课程名称:
机电一体化系统设计自学时间:
15周
教材名称:
机电一体化系统设计(郑海明中国质检出版社)
编写教师:
郑海明
周次
学习内容
习题
测验作业
1
第1章绪论
1.1机电一体化基本概念
1.2机电一体化系统构成
1.3机电一体化关键技术
1-1,1-2,1-5
附后
2
1.4机电一体化典型产品
1.5机电一体化发展趋势
3
第2章机械机构与系统
2.1概述
2.1.1机电一体化对机械系统的要求
2.1.2机械系统的构成
2.2机械传动机构
2.2.1齿轮传动机构及其设计
2-1,2-2,2-3
4
2.2.2丝杠螺母机构及其选用
2.2.3动力参数的匹配计算
2.2.4机械系统的精度
2.3导向与支承机构
2.3.1导轨副的组成、种类及其应满足的要求
2.3.2移动型支承导向部件
2-5,2-6,2-7,2-9,2-12,2-17
5
2.4机械执行机构
2.4.1数控机床回转刀架
2.4.2工业机器人末端执行器
2-15,2-16
6
第3章执行元件及驱动系统
3.1概述
3.1.1执行元件的分类及特点
3.1.2机电一体化系统对执行元件的要求
3.2步进电机的驱动控制
3.2.1步进电机的工作原理
3.2.2步进电机的特点及性能指标
3.2.3步进电机的驱动与控制
3.2.4步进电机的选用方法
3-1,3-2,3-3,3-4
7
3.3直流伺服电机的驱动控制
3.3.1直流伺服电机的原理及特点
3.3.2直流伺服电机的分类
3.3.3直流伺服电机的驱动与控制
3.3.4直流电动机的选用方法
3-9,3-10
8
3.4交流伺服电机的驱动控制
3.4.1交流伺服电动机的种类和结构特点
3.4.2交流伺服电动机的控制方法
3.4.3交流伺服电动机的选用方法
3-11
9
第4章计算机与控制系统
4.1概述
4.1.1机电一体化系统的控制对象
4.1.2计算机控制系统的组成及原理
4.1.3控制计算机的特点与分类
4.2总线型工控机
4.2.1总线型工控机概述
4.2.2STD总线
4.2.3PC总线
4.3单片微型计算机
4.3.1单片机的特点
4.3.2单片机的类型
4.3.3MCS-51系列单片机
4-1,4-2,4-3
10
4.4可编程控制器
4.4.1可编程控制器概述
4.4.2可编程控制器的组成
4.4.3可编程控制器的选用
4.5计算机接口技术
4.5.1数字量输入输出接口与过程通道
4.5.2模拟量输入输出接口与过程通道
4-5,4-6
11
第5章传感器与检测系统
5.1概述
5.1.1传感器的组成
5.1.2传感器的分类
5.1.2传感器的静态与动态特性
5.2常用机械量传感器
5.2.1位置传感器
5.2.2位移传感器
5.2.3速度传感器
5.2.4加速度传感器
5.3常用传感器的性能指标
5-1,5-3,5-4
12
5.4传感器与计算机的接口
5.4.1传感器的测量电路
5.4.2传感器与计算机的接口
5-10
13
第6章低压电器与动力源
6.1低压电器的选择
6.2低压电器的选择
6.2.1按钮、刀开关等元件的选择
6.2.2熔断器的计算与选择
6.2.3交流接触器的选择
6.2.4继电器的选择
6-1,6-2
14
6.3开关电源及电源柜
6.3.1开关电源简介
6.3.2电源柜简介
6-5
15
第8章机电一体化技术应用实例
8.1工作台自动往返的PLC控制系统
8.2车床的机电一体化系统改造
8-1,8-4
注:
面授时将测验作业交任课教师批改。
其成绩占该课程总成绩的10%。
测验作业
1.一数控系统结构如下图所示,说明图中各个部分分别属于机电系统的哪一基本构成要素?
2.绘简图分析比较全闭环伺服机电系统与半闭环伺服机电控制系统的主要区别?
两者特点及应用场合?
3.什么是爬行现象?
定性分析产生爬行现象原因?
防止爬行现象出现可采取什么措施?
4.为何要对滚珠丝杠螺母副轴向间隙进行预紧调整?
下图属于哪种类型的预紧调整方式?
简要分析其预紧调整轴向间隙的原理和特点,并指出图中部件1、2的作用?
(图中3、4均为滚珠螺母)
5.已知:
4级齿轮传动系统,各齿轮的转角误差(
)均为0.005rad,各级减速比(i1、i2、i3、i4)相同,均为1.5,求:
①该传动系统的最大转角误差
;
②为缩小其最大转角误差,应采取何种措施?
6.简述光栅的组成,并简要说明莫尔条纹的作用。
若已知光栅栅距d=0.01mm及莫尔条纹的宽度w=5mm,则莫尔条纹的放大倍数是多少?
7.有一采用四相八拍驱动方式的步进电机,其转子有90个齿,经丝杠螺母副驱动工作台作直线运动,丝杠的导程为7.2mm,齿轮的传动比i=z1/z2=1/5。
工作台移动的最大速度为10mm/s,求:
(1) 步进电机的步距角;
(2) 工作台的脉冲当量;
(3)步进电机的最高工作频率?
 升级会员
升级会员 