电机与拖动实训设计.docx
《电机与拖动实训设计.docx》由会员分享,可在线阅读,更多相关《电机与拖动实训设计.docx(16页珍藏版)》请在冰豆网上搜索。
电机与拖动实训设计
1.他励直流电动机的调速
1_调节电枢电压调速
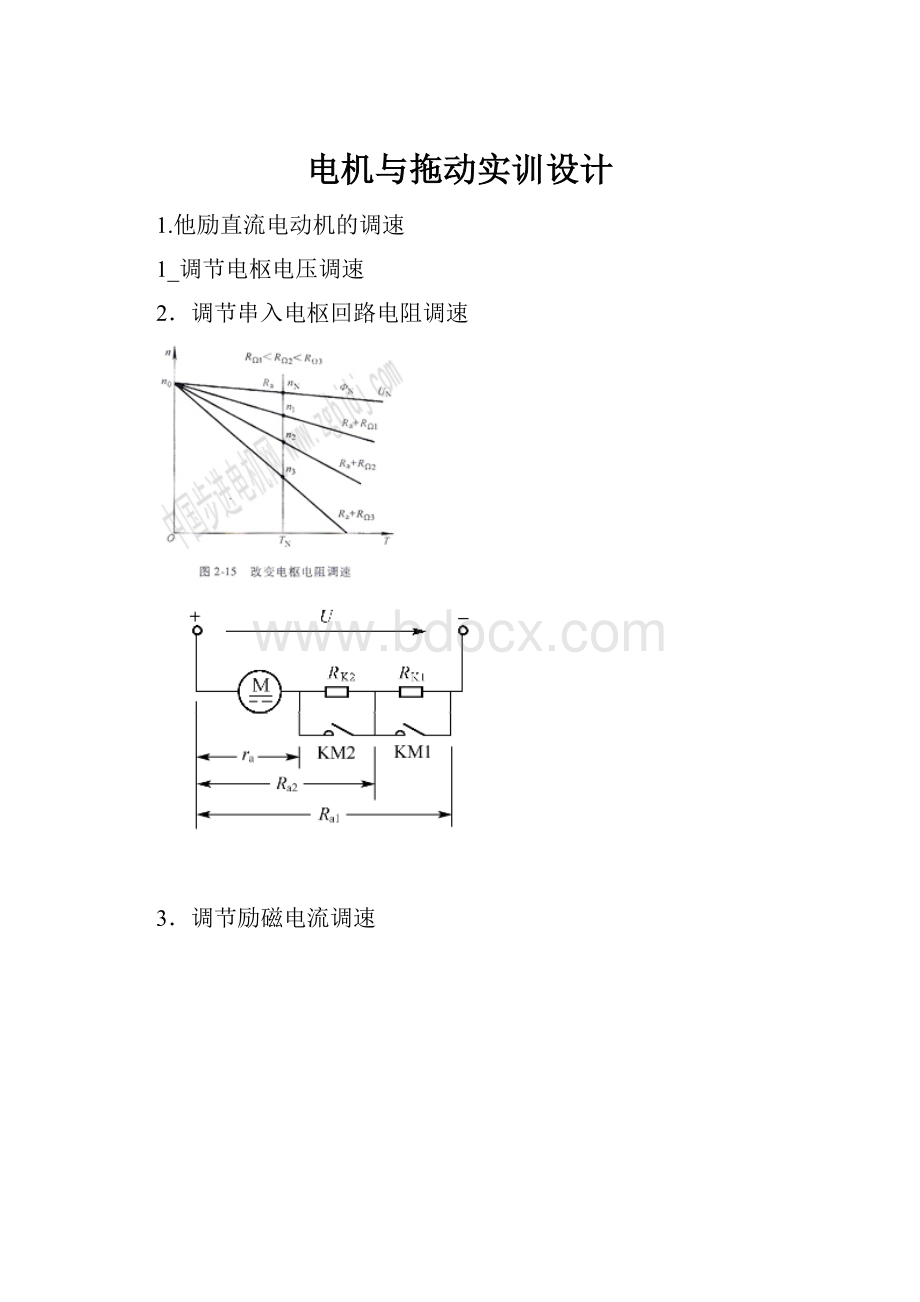
2.调节串入电枢回路电阻调速
3.调节励磁电流调速
他励直流电动机起动步骤
(1)检查按原理图的接线是否正确,电表的极性、量程选择是否正确,电动机励磁回路接线是否牢靠。
(2)将电动机电枢串联起动电阻R1、测功机MG的负载电阻R2、及MG的磁场回路电阻Rf2调到阻值最大位置,M的磁场调节电阻Rf1调到最小位置,断开开关S,并断开控制屏下方右边的电枢电源开关,并将控制屏上电枢电源‘电压调节’旋钮调至最小,作好起动准备。
(3)开启控制屏上的电源总开关,按下其上方的“开”按钮,接通其下方左边的励磁电源开关,观察M及MG的励磁电流值,调节Rf2使If2(电流表A2)于校正值(100mA)并保持不变,再接通控制屏右下方的电枢电源开关,调节控制屏上电枢电源‘电压调节’旋钮,使电动机M起动。
(4)M起动后观察转速表指针偏转方向,应为正值。
(若不正确,先关断电枢电源开关,再关断励磁电源开关,用励磁电源极性对调来纠正转向,重复步骤
(1)
(2),使电动机M起动。
)电动机M起动后,调节控制屏上电枢电源电压为220伏。
减小起动电阻R1阻值,直至短接。
(5)合上校正直流测功机MG的负载开关S,调节R2阻值,记录电枢电流I(电流表A3)不同值时,使MG的负载电流IF(电流表A4)改变值,即直流电动机M的输出转矩T2改变值(按不同的IF值,查对应于If2=100mA时的校正曲线T2=f(IF),可得到M不同的输出转矩T2值)。
将测得数据记录到表1-1中。
I(电流表A3)
IF(电流表A4)
T2
(6)调节他励电动机的转速
分别改变电动机M电枢回路的电阻R1和励磁回路的电阻Rf1,观察转速变化情况。
保持励磁回路的电阻Rf1不变,改变电枢回路的电阻R1,使其增大,测转速n。
将测得数据记录到表1-2中。
表1-2
R1
n
保持电阻R1=0不变,改变励磁回路的调节电阻Rf1时,测转速n。
将测得数据记录到表1-3中。
表1-3
Rf1
n
(7)改变电动机的转向
将电枢串联起动变阻器R1的阻值调回到最大值,先切断控制屏上的电枢电源开关,然后切断控制屏上的励磁电源开关,使他励电动机停机。
在断电情况下,将电枢(或励磁绕组)的两端接线对调后,再按他励电动机的起动步骤起动电动机,并观察电动机的转向及转速表指针偏转的方向。
2.直流电动机电枢等效电路
他励直流电动机的启动
图5-1接线图及机械特性
启动步骤如下:
①串联启动电阻Rst1和Rst2启动
起动前开关S1和S2断开,使得电枢电路中串入电阻Rst1和Rst2,加上电枢电路自身的电阻Ra,电枢电路的总电阻为
加上励磁电压Uf,保持励磁电流If为额定值不变,然后加上电枢电压Ua,由于启动转矩TST大于负载转矩TL,,电动机拖动生产机械开始启动,工作点沿人为特性a由a1点向a2点移动。
②切除启动电阻Rst2
当工作点达到a2点即电磁转矩T等于切换转矩T2时,合上开关S2,切除启动电阻Rst2,电枢电路的总电阻为R1=Ra+Rst1这时电动机的机械特性变为人为特性b切除Rst2转速来不及改变,工作点由特性 a上的a2点平移到特性b上的b1点,使这时的电磁转矩T仍等于T1,电动机继续加速,工作点特性b由b1点向b2点移动。
③切除启动电阻Rst1
当工作点到达b2点,即电磁转矩T又等于切换转矩T2,合上开关S1,除启动电阻Rst1,电枢电路的总电阻变为
机械特性变为固有特性c。
工作点由b2点平移至c1点,使得这时的电磁转矩T仍正好等于T1,电动机继续加速,工作点沿人为特性c由c1点经c2点,最后稳定运行在p点。
整个起动过程结束。
2.降压起动
当直流电源电压可调时,可以采用降压方法起动。
起动时,以较低的电源电压起动电动机,起动电流便随电压的降低而正比减小。
随着电动机转速的上升,反电动势逐渐增大,再逐渐提高电源电压,使起动电流和起动转矩保持在一定的数值上,从而保证电动机按需要的加速度升速。
调节串入电枢回路电阻调速
在电枢回路串八电阻RΩ从串八电阻后他励直流电动机的机械特性
可知,机械特性的斜率将随之增大,即‰不变,改变的只是△n所以它和负载特性的交点随着RΩ的变大而逐步下移,
第三章他励直流电动机的调速
为了提高劳动生产率和保证产品质量,要求生产机械在不同情况下有不同的工作速度,如扎钢机在扎制不同的品种和不同厚度的钢材时,就必须有不同的工作速度以保证生产的需要,这种人为改变速度的方法称为调速。
可以用机械的方法或电气的方法实现调速。
这里只分析电气调速方法及其性能特点。
电气调速是人为的改变电气参数,有意识地使电动机工作点由一条机械特性曲线转换到另一条机械特性曲线上,为了生产需要而对电动机转速进行的一种控制,它与电机在负载或电压随机波动时而引起的转速扰动变化是两个不同的概念。
根据直流电动机调速公式n=
可见,当电枢电流不变时(即负载不变),只要在电枢电压U、电枢电路附加电阻和每极磁通ф三个参数中,任意改变一个,都能引起转速的变化。
因此,他励直流电动机可以有三种调速方法。
为了评价各种调速方法的优缺点,对对调速方法提出了一定的技术经济指标,通常称为调速指标。
下面下面对调速指标做一简要说明。
3.1调速指标
(1)调速范围
调速范围是只指电动机在额定负载下调素时,其最高转速与最低转速之比,用D表示,即
D=
不同的生产机械对对调速范围的要求不同,如车床D=20~100,龙门刨床D=10~40,扎钢机D=1.20~3等。
电动机最高转速nmax受电动机的换向及机械强度限制,最低转速相对稳定(即静差率)要求的限制。
(2)静差率(调速的相对稳定性)
静差率或转速变化率是指电动机在一条机械特性上额定负载时的转速降落△n与该机械特性的理想空载转速n0之比,用*表示,即
σ=
=
式中,n为额定负载转矩Tem=TL时的转速
从上式可以看出,在△n相同时,机械特性越“硬”,额定负载时转速降越小,静差率σ越小,转速的相对稳定性越好,负载波动时,转速变化也越小。
图3-1中机械特性1比机械特性2“硬”。
静差率除了与机械特性硬度有关外,还与理想空载转速n0成反比。
对于同样“硬度”的特性,如图3-2中特性1和特性3,虽然转速将相同,但其静差率却不同。
为了保证转速的相对稳定性,常要求静差率应不大于某一允许值(允许值)。
调速范围D与静差率σ两项性能指标是相互制约的,当采用同一种方法调速时,静差率要求较低时,则可以得到较低的调速范围;反之,静差率要求较高时,则调速范围小。
如果静差率要求一定时,采用不同的调速方法,其调速范围不同,如果改变电枢电压调速比电枢串电阻调速的调速范围大。
调速范围与静差率是相互制约的,因此需要调速生产机械,必须同时给出静差率与调速范围这两项指标,以便选择适当的调速方法。
(3)调速的平滑性
调速的平滑性是指相邻两级转速的接近程度,用平滑系数ψ表示,即
Ψ=
平滑系数Ψ越接近1,说明调速的平滑性越好。
如果转速连续可调,其级数趋于无穷多,称为无级调速,Ψ=1,其平滑性最好;调速不连续,级数有限,称为有级调速。
(4)调速的经济性
经济性包含两方面的内容,一是指调速所需的设备和调速过程中的能量损耗,另一方面是指电动机调速时能否得到充分的利用。
一台电动机当采用不同的调速方法时,电动机容许输出的功率和转矩随转速变化的规律是不同的,但电动机实际输出的功率和转矩是有负载需要所决定的,而不同的负载,其所需要的功率和转矩随转速的变化的规律也是不同的,因此在选择调速方法时,既要满足伏在要求,又要尽可能是电动机得到充分利用。
经分析可知,电枢回路串电阻调速以及降低电枢电压调速适用于恒转矩负载的调速,而若此调速适用于恒功率负载的调速。
3.2电枢串电阻调速
他励直流电动机拖动负载运行时,保持电源电压及励磁电流为额定值不变,在电枢回路中串入不同阻值的电阻,电动机将运行于不同的转速,如图3—3所示,图中的负载为恒转矩负载。
从图3—3可以看到,当电枢回路串入电阻R时,电动机的机械特性的斜率将增大,电动机和负载的机械特性的交点将下移,即电动机稳定运行转速降低。
图3—3电枢串电阻调速机械特性
如图3—3中传入的电阻
>
交点
的转速
低于交点
的转速
,它们都比原来没有外串电阻的交点A的转速n低。
电枢回路串电阻调速方法的优点是设备简单,调节方便,缺点是调速范围小,电枢回路串入电阻后电动机的机械特性变“软”,使负载变动时电动机产生较大的转速变化,即转速稳定性差,而且调速效率较低
3.3改变电枢电源电压调速
他励直流电动机的电枢回路不串接电阻,由一可调节的直流电源向电枢供电,最高电压不应超过额定电压。
励磁绕组由另一电源供电,一般包保持励磁磁通为额定值。
电枢电压不同时,电动机拖动负载将运行于不同的转速上图3-4
从图3—4中可以看出,当电枢电源电压为额定值时,电动机和负载的机械特性的交点为A,转速为n;电压降到
后,交点为
转速为
;电压为
,交点为
,转速为
;电压为
,交点为
,转速为
;电枢电源电压越低,转速也越低。
同样,改变点数电源电压调速方法的范围也只能在额定转速与零转速之间调节。
改变电枢电源电压调速时,电动机机械特性的“硬度”不变,因此,集市电动机在低速运行时,转速随附在变动而变化的幅度较小,即转速稳定性好。
当电枢电源电压连续调节时,转速变化也是连续的,所以这种调速称为无级调速。
改变电枢电源电压调速方法的有电视调速的平滑性好,即可实现无级调速,调速效率高,转速稳定性好,缺点是所需的可调电源设备投资较高。
这种调速方法在直流电力拖动系统中被广泛使用。
图3-5弱礠调速机械特性
3.4弱磁调速
励直流电机电枢电流电压不变,电枢回路也不串接电阻,在电动机拖动负载转矩不很大(小于额定转矩)时,减少直流电动机的励磁磁通,可使电动机的转速提高。
他励直流电动机带恒转矩负载时弱磁调速,如图3—5所示。
从图3—5中可以看出,当励磁磁通为额定值ΦN时,电动机和负载的机械特性的交点为A,转速为n:
励磁磁通减少为Φ2时,理想空载转速增大,同时机械特性斜率也变大,交点为A1,转速为n1;励磁电流减少为Φ1,交点为A2,转速为n2。
弱磁调速的范围是在额定转速与电动机的所允许最高转速之间进行调节,至于电动机所允许最高转速值是受换向与机械强度所限制,一般约为1.2m左右,特殊设计的调速电动机,可达3nN或更高。
弱磁调速的优点是设备简单,调节方便,运行效率也较高,适用于恒功率负载,缺点是励磁过弱时,机械特性的斜率大,转速稳定性差,拖动恒转矩负载时,可能会使电枢电流过大。
在实际的电力拖动系统中可以将几种调速方法结合起来,这样,可以得到较宽的调速范围,电动机可以在调速范围之内任何转速上运行,而且调速时的损耗较小,运行效率较高,能很好的满足各种生产机械对调速的要求。
3.
(二)设计的任务:
利用MATLAB软件完成变压器及电机仿真
1、进行变压器空载运行仿真设计
2、进行变压器负载运行仿真设计
3、进行直流电动机的转矩特性仿真设计
4、进行直流电动机的机械特性仿真设计
5、进行直流电动机的起动仿真设计
6、进行直流电动机的调速仿真设计
7、进行直流电动机的制动仿真设计
8、进行三相异步电动机的机械特性仿真设计
9、进行三相异步电动机的起动仿真设计
10、进行三相异步电动机的调速仿真设计
11、进行三相异步电动机的反转仿真设计
12、进行三相异步电动机的制动仿真设计
(三)设计的要求:
1.基本要求:
(1)完成变压器空载运行仿真设计
(2)完成直流电动机的机械特性仿真设计
(3)完成直流电动机的起动仿真设计
(4)完成直流电动机的调速仿真设计
(5)完成直流电动机的制动仿真设计
(6)完成三相异步电动机的机械特性仿真设计
(7)完成三相异步电动机的起动仿真设计
(8)完成三相异步电动机的调速仿真设计
(9)完成三相异步电动机的反转仿真设计
(10)完成三相异步电动机的制动仿真设计
(11)完成直流电动机的反转仿真设计
2.技术要求:
(1)程序设计完整
(2)程序运行正确
 升级会员
升级会员 