平面机构的运动分析习题和答案.docx
《平面机构的运动分析习题和答案.docx》由会员分享,可在线阅读,更多相关《平面机构的运动分析习题和答案.docx(108页珍藏版)》请在冰豆网上搜索。
平面机构的运动分析习题和答案
2平面机构得运动分析
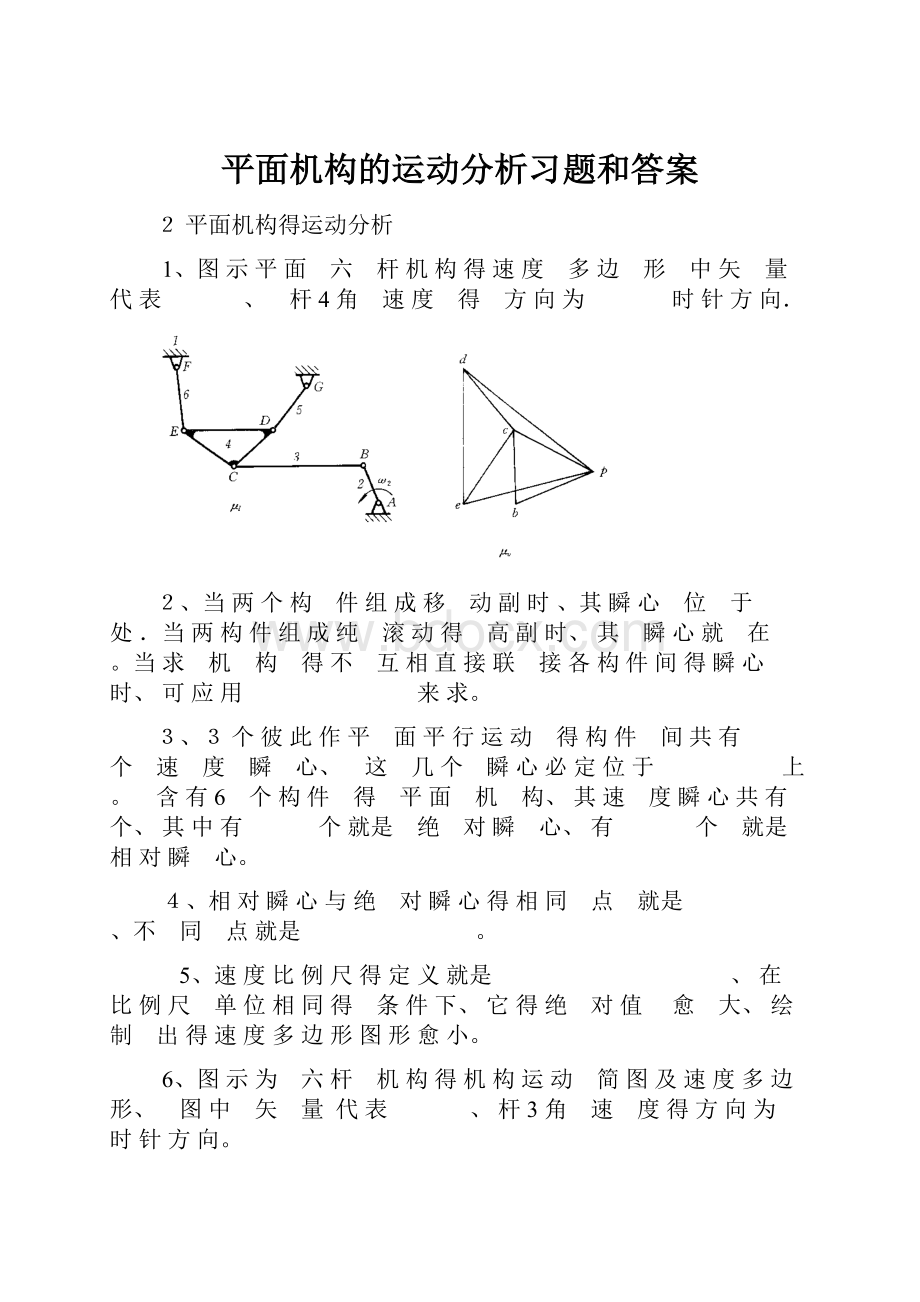
1、图示平面 六 杆机构得速度 多边 形 中矢 量代表 、 杆4角 速度 得 方向为 时针方向.
2、当两个构 件组成移 动副时、其瞬心 位 于 处.当两构件组成纯 滚动得 高副时、其 瞬心就 在 。
当求 机 构 得不 互相直接联 接各构件间得瞬心 时、可应用 来求。
3、3个彼此作平 面平行运动 得构件 间共有 个 速 度 瞬 心、 这 几个 瞬心必定位于 上。
含有6 个构件 得 平面 机 构、其速 度瞬心共有 个、其中有 个就是 绝 对瞬 心、有 个 就是相对瞬 心。
4、相对瞬心与绝 对瞬心得相同 点 就是 、不 同 点就是 。
5、速度比例尺得定义就是 、在比例尺 单位相同得 条件下、它得绝 对值 愈 大、绘制 出得速度多边形图形愈小。
6、图示为 六杆 机构得机构运动 简图及速度多边形、 图中 矢 量代表 、杆3角 速 度得方向为 时针方向。
7、机构 瞬心得数目与机构得构件 数k得关系就是 。
8、在 机构运动分析图解法 中、影像原理只适用于 .
9、当两 构件组成 转动副时、其速度瞬心 在 处;组 成 移动 副时、 其 速度瞬心在 处;组成兼 有 相对滚动 与滑 动 得平面高副时、其速度瞬心在 上。
10、、速度 瞬心就是 两刚 体上 为 零得 重合点.
11、铰链四杆机 构共有 个速度 瞬心、其 中 个就是绝对 瞬心、 个 就是相 对 瞬心。
12、速度 影像 得 相似 原理只 能应用于 得各 点、而 不 能应 用于 机 构 得 得各点.
13、作 相 对运 动得3个构件得3个 瞬 心必 。
14、当两构件组成转动 副时、 其瞬心就就是 .
15、在摆 动导 杆机 构中、当导 杆与滑块得相对运动为 动、 牵连运 动为 动时、两构件得重 合点之间将有哥氏加速 度.哥氏加速度 得大小 为 ;方向与 得方 向 一致.
16、相 对运动瞬心 就是相对运动 两 构件上 为零得重 合点.
17、车轮在地面上纯滚 动 并以 常速前进、则轮缘 上点 得绝对加速度
。
—-— -——-— — -—-——-— -——--- --- —- - - — — -- — —--—-( )
18、高副 两 元素 之间相对 运 动有 滚 动与 滑动 时、其瞬 心就在两元素得接触点。
- -—( )
19、在 图 示 机 构中、已知及 机构尺寸、 为求解点 得加速度、 只要 列 出一个 矢量方程就可以用 图解法将求出.— — -- --— —--—- - ---——( )
20、在 讨论杆2与杆3上得瞬时 重合点得速度与加速度 关 系时、可以选择任 意点作为瞬时 重合 点。
- ---——---———-— -- --—— ——- —- -—-—--- — -—- --— —--- —-—— --( )
21、给定 图示机 构得位置图 与速度多边 形、则图示 得得 方 向就是对 得。
- —— -——— ———-———-- -—-—--—- —--- - —-------——--— — —-—- ( )
22、图示机构中、因为、 、所以。
——-( )
23、平面连杆机 构得 活 动件数 为、则可构成得机构 瞬心 数就是 。
- — --( )
24、在同一构 件上、任意两点 得 绝对加 速度间得关系 式中不 包含哥氏 加速 度。
— ——- ( )
25、当 牵连运动为转动、相 对运 动就是 移动时、一 定会产生 哥氏加 速度.- --—- ---()
26、在平面机 构中、不与机架直接相连 得 构件上任一点得 绝对速度均不为零.-- —( )
27、两构件组 成一般情 况得高副 即非纯滚动高 副 时、其瞬心就在高副接 触点处。
—- ( )
28、给 定 导 杆机 构在 图示 位置得 速度 多 边形. 该瞬 时与得正 确 组合应就是图 。
29、给定图示六 杆机构得加速度多边 形、可得出
(A)矢量代表、 就是顺时 针方向;
(B)矢量代表、就是逆 时针方向;
(C)矢 量代表、就是顺时 针方向;
(D) 矢量代表、就是逆时 针 方 向。
30、利 用相 对运动图解 法来 求 解图示 机构中 滑 块2上 点得速度、解题过 程得恰当步 骤与利用得矢量 方程可选 择 。
(A)、速度影像~
(B)、速度影像~
(C)、
(D)、速 度影像~
31、作 连续 往复移 动得构件、在行程得两端极限位置处、 其运 动状态必定就是 。
(A); (B)、;
(C)、; (D)、.
32、图 示连杆 机构中滑块2 上点得轨迹 应就是 。
(A)直线; (B)圆弧 ;(C)椭 圆; (D)复 杂平面曲线.
33、构件2与 构 件3 组成移动副、则有关系
(A) 、;(B)、;
(C) 、;(D) 、 .
34、用速度影像法求杆3上与点重合得点 速度 时、可以使
(A)~;ﻩ(B)~;
(C)~ ; (D)~。
34、图示凸轮机构 中就是凸轮1与从动件2得 相对速度瞬 心。
O为 凸轮 廓线在接触点处得曲率中心、 则计算式 就是正确得。
(A); (B) ;
(C) ;(D) 。
36、在两构件得相对速度瞬 心处、瞬时 重 合点 间得 速度应有 。
(A)两点间相对速度为零、但两点绝对速度不等于零;
(B)两点间相 对速 度不等于零、但其中一点 得绝 对速度 等于零;
(C)两点间相对速 度 不等于零 且两点 得绝对速 度 也不等于零;
(D)两点 间 得相对速度 与绝对速度都等于 零。
37、在 图示连 杆 机构中、连杆2得运动就是 。
(A)平动; (B) 瞬 时平动;
(C) 瞬时绕轴B转动; (D) 一 般平面复合 运动。
38、将 机构 位置图按实际杆长 放大 一倍 绘制、选 用得长 度 比例尺应 就是 。
(A)0、5mm/mm ; (B)2mm/mm;
(C)0、2 mm/mm; (D)5 mm/mm。
39、两构 件作相 对运动时、其 瞬心就是指 。
(A) 绝对速度等于零得重合 点;
(B)绝 对速度与相对速度 都等于零得 重合点;
(C)绝 对速 度不一定等于零但绝对速度相等或相对速度等于 零 得重合点。
40、下图就是四种机构 在某一瞬时得位置 图。
在图 示位 置哥 氏加速 度不 为零得机构为 。
41、利 用 相 对运动图解法 求图示机 构中滑 块2 上点得速度 得 解题 过程得恰当步骤与利用得 矢量 方 程为:
(A)、 利用速度影像法~;
(B)、~;
(C)、式中
(D)、求出后、再 利用。
42、
43、在图示 曲柄滑块 机构中、已知连杆长(为曲柄长、 为导路偏距)、滑块 行程就是 否等于?
为 什么?
44、在机 构 图示位置时 ()有无 哥 氏加速度?
为什 么?
45、已知铰链 四杆机 构得位 置(图a)及其加 速 度 矢量多边形(图b)、试根 据图 b写 出 构 件2与构件3 得 角加速度 、得 表达 式、并在 图 a上标出 它 们得方 向。
46、图示机构 中 已知rad/s、、 试分 析 及为多大。
47、图 示机构有 无哥氏加速度?
为 什么?
48、图示为曲柄 导 杆 机构、滑块2在导 杆3() 中 作相对滑动、 为 曲 柄。
当 在图示 位置时、 即 曲 柄( 构件1)与 导杆(构件3) 重合 时、有无哥氏 加速度?
为 什么?
49、什 么叫机构运动线图?
50、已知 六杆机 构 各构件得尺寸、 位置及原 动 件得角速度常数、 欲求、.如采 用相对运 动图解法时、此题得解题顺序 应如何?
51、图示为按比 例尺 绘制得牛头刨 床机构 运 动简图与速度矢量多边形。
试 由图中得比例尺计 算 导杆3 得 角速 度 与 滑 块2得 角速度、并指出其 方向.(提示:
为构 件3上 特殊点、 据 、求 得、作题 时不 必去研究如何 求得。
)
( 取m/mm、(m/s)/mm。
)
52、试 求图示 机构得速度瞬心数 目、各瞬心位 置、 各构件角 速度 得大小 与方向、 杆2上点M得速度 大 小与方向。
(机构尺寸如图:
mm、mm、 mm、mm、、mm、m/mm。
)已知 rad/s。
53、图 示 机构中尺寸 已知( m/mm)、机构1沿构 件4作纯滚 动、 其上S点得速度为( (m/s)/mm).
(1)在图上作 出 所有瞬心;
(2) 用瞬心法 求出 K点得速度。
54、画出 图示机构得指定瞬 心。
(1)全部瞬心。
(2)瞬心P24、P26。
55、在图示 机构中、已知滚轮2与地面作纯 滚 动、构件3 以已 知速 度向左移 动、试用瞬心 法 求 滑块5 得 速 度 得大 小与方向、以 及 轮2 得 角 速度得 大小与方 向。
56、已知 图 示机构 得 尺寸与位置。
当时、试用 瞬心法求。
57、在图示机构中、 已 知构 件1以 沿顺时针方向转动、试用瞬心 法求构件2得角速度与 构 件4得速度得大小( 只需写 出表达 式) 及方向。
58、图示齿轮-连杆机构中、已知齿 轮2与5得 齿 数相等、即、齿轮2以 rad/s 顺时 针方向 转动、试 用瞬心法求 构件3得 角速度得 大 小与方向。
( 取m/mm.)
59、在图 示 机构 中、已知原动件1以匀角速度ω1 沿 逆时针方向 转 动、试确定:
(1)机 构得 全部瞬 心;
(2)构件 3得速度(需写 出表 达式)。
60、求图示五杆机构得全 部瞬心、已知各杆长度 均相等、且与回转方 向相 反。
61、求图 示 机 构得 速度 瞬 心得 数目、 并 在图中标 出其中 得12个瞬心。
62、图示摆 动 导 杆 机构中、 已知构件1以 等角速度 rad/s 顺 时针方向转动、各构件尺寸 mm、mm、。
试求:
(1)构件1、3得相对 瞬心;
(2)构件3得角速度;
(3)构件2得 角速度。
63、画出图示机 构得 全部 瞬心.
64、在图示机构中、已知凸轮1得角 速度得大小 与 方 向、试用瞬心 法求构件3得速度大小 及方向。
65、图示机 构得长度比例尺m/mm、构件1 以等角速 度rad/s 顺时 针方向转动. 试求:
(1)在图上 标 注出全 部瞬心;
(2) 在此位置时构 件3得角 速 度 得大 小及方 向。
66、已知图示机 构得尺寸及原动件1得角 速度。
(1)标 出所有 瞬心 位 置;
(2)用瞬心 法确 定M点得 速度νM .
67、已知 图示 机 构 得 尺寸 及原动件1得角速度。
(1)标出所有 瞬 心位 置;
(2)用 瞬心法确定M 点 得速 度。
68、 标出下列机构中 得所有 瞬心。
69、图 示机 构中、 已知 ϕ=45︒、mm、rad/s.试用瞬心法确 定图示位 置构件3得 瞬时速度得大 小 及方 向。
70、试 在图上标 出机构 各构件 间 得瞬 心位置、并用瞬 心法说明 当构件1等速转动时、构件3与 机架间 夹角 为 多大 时、构件3得 与 相 等。
71、在图示得四 杆机 构中、 mm、mm、mm、。
当构件1以 等角速度rad/s逆时针 方向转动时、用 瞬心法 求C点得速度。
72、图示机 构 运动 简图 取比例 尺 m/mm.已知 rad/s、试 用 速度瞬心法求杆3得 角速度。
73、在 图示机 构中已知 凸 轮以 得 角 速度 顺时针方向转动、试用 瞬心法求出从动件3得速度(用图及表达式 表示)。
74、已知图示机构 以 m/mm得 比例 绘制、 rad/s、P24 为瞬心、计算得值(必须写 出计算 公式与量 出得数 值)。
75、画出图示机构得全部瞬心。
76、画 出图示机构得 全 部 瞬 心.
77、在图 示机 构中、曲柄AB以 逆时 针 方 向回转、通过齿条2 与齿轮3啮 合、使轮3绕 轴D转 动。
试用瞬心法确 定机构在图示位置时轮3 得角 速度得大小与 方 向。
(在图 中标出 瞬心、并用表达式表 示。
)
78、试求图示 机构 得 全部瞬心。
79、试求 图 示机 构 得全部瞬心、并说明哪些 就是绝 对瞬心.
80、在图 示四杆机 构中、 已知mm、mm、∠α=∠β=90︒、 rad/s. 试用速度瞬心法求 C点速度 大小与方向。
81、试求 图 示机构 得全 部瞬心、并应用瞬 心法求 构件3 得 移动速度 得大小与方向。
图中已知 数据mm、、rad/s.
82、在图示 铰 链五 杆 机构中、 已知构 件2 与 构 件5得角 速 度ω2 与 ω5 得大小 相等、转向相反。
请在图上 标出瞬心P25、P24及P41得位置。
83、 试求图示机 构得全部 瞬 心。
84、
85、图 示机构中、齿轮1、2得 参数 完全相同、AB=CD=30mm、处于铅直位置、 rad/s、顺时针方向转动、试用相对运动图解 法求 构件3得角速度与角加速 度α3。
(机构运动简 图 已按比例 画 出.)
86、图示机构 得 运动简图取长度 比例尺m/mm、其 中 m、m、m、构件1 以rad/s等角速度顺时 针 方向转动、试 用相对运动图解法求 图 示位置:
(1)、、与得大小与方向;
(2)、α3、α4 与α5得大 小与 方 向;
(3)在机 构运动简 图 上标 注 出 构件2 上速度为零得点、在 加速度多边形图上标注 出构件2上 点得 加 速 度矢量、并算 出点得 加 速度 得大 小。
在 画速 度图及加 速度 图时得比例尺分别为:
=0、02 (m/s)/mm、(m/s2)/mm。
(要列出相 应得矢量 方程 式与计算关 系式.)
87、试 按给定 得机构运 动简图绘制 速度多边 形、加 速度多边形。
已知:
rad/s、mm、mm、 m/mm。
试求:
(1)ω2、ω4、α2、α4大 小与方 向;
(2)、大小 与方向。
88、在图 示机构 中、已知:
各 杆长 度、为常数.试求及 .
89、在 图 示机构 中、已知 机构位 置图与各杆尺寸、=常数、 、、 试用 相 对运动图 解法求、、、及、α2。
90、图示机构中、已知各构件尺寸:
mm、mm、mm、mm、 mm、mm、mm、长度比例尺 m/mm、 原动 件1以等 角 速度rad/s逆时针方向转动. 试求:
(1) 构 件2、3、4与5得角速 度、、、得 大小及方向;
(2)在图 上标出构件 4上 得点 、该点得 速度得 大 小、方向与 构件3上 得点D速 度相同;
(3) 构件2、3、4与5 得角加速度 α2、α3、α4、α5得大小与方向。
(建议速度比例 尺(m/s)/mm、加 速 度比例 尺(m/s2)/mm.)(要求列 出相应矢量方程式与计算关系 式。
)
91、图 示连杆机构、 长度 比 例尺m/mm、其 中 mm、 mm、 mm、mm、mm、rad/s。
试 用相对运动图解法求:
(1)、、、得 大小及方向;
(2)α2、α3、α4、α5得大 小 与方向;
(3)构件5 上得点 F5 得速度与加速度;
(4)构件4上得点F4得速度 与加 速度 。
(速 度多 边形与加速 度多 边形得比例尺 分 别 为(m/s)/mm、(m/s2)/mm、要求 列 出相应得矢 量方 程式与计算 关系式.)
92、机构如图所示、已 知 构件 长度、并且已 知杆1以匀角速度回 转、用相对运动图解法 求该位置滑块5得 速度及加速 度。
93、已知机 构位置如图所示、各杆长 度已知、且构件1 以 匀速转 动、试用相对运动图解法 求:
(1)、;
(2)、。
94、已知 各杆长度及位置 如图所 示、 主动 件1以 等 角速度 运 动、求:
(1)、;
(2)、 ( 用相 对运 动 图 解法、并列出 必 要得 求解式。
)
95、机构
 升级会员
升级会员 