BLDC原理图文介绍推荐.doc
《BLDC原理图文介绍推荐.doc》由会员分享,可在线阅读,更多相关《BLDC原理图文介绍推荐.doc(5页珍藏版)》请在冰豆网上搜索。
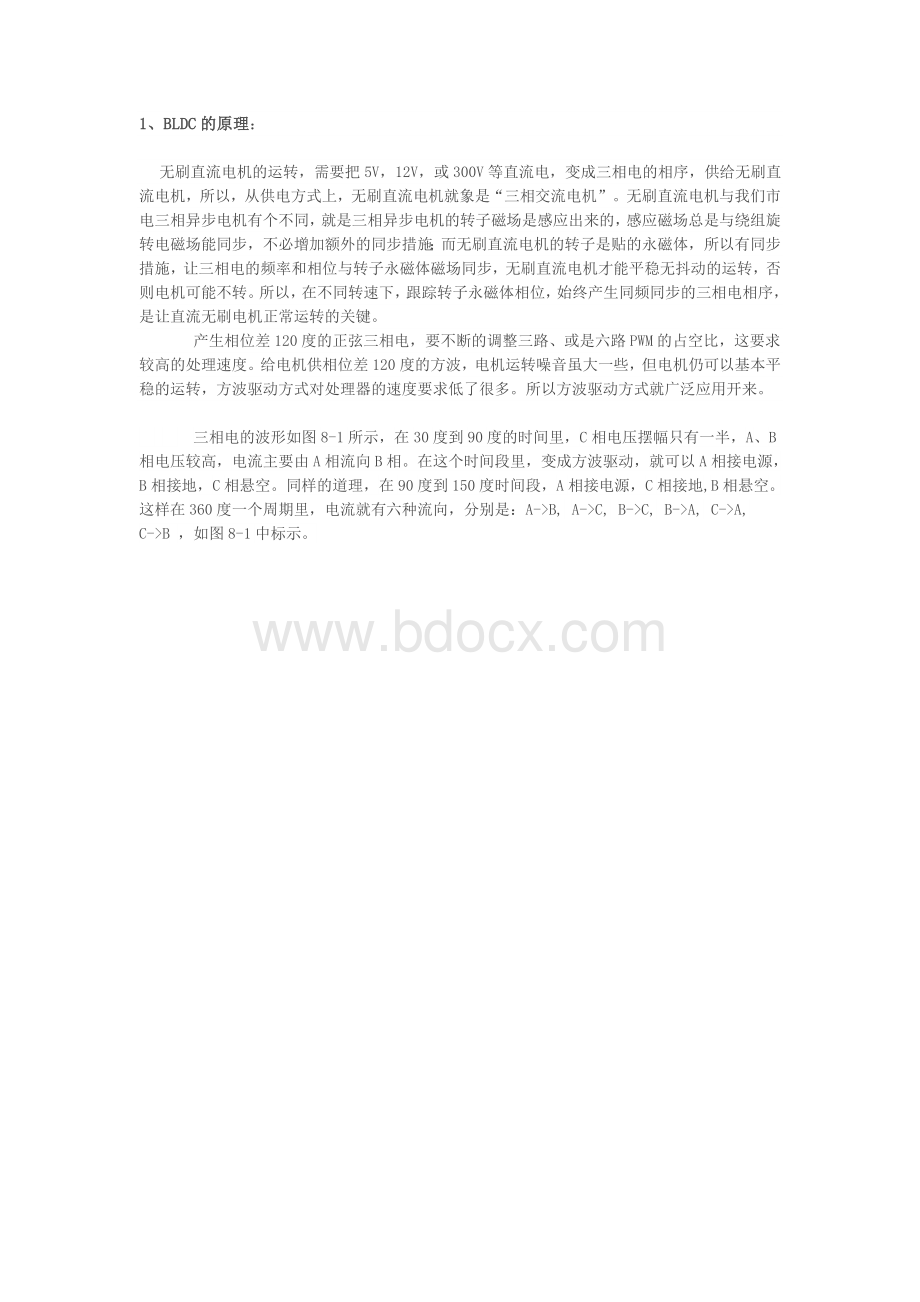
1、BLDC的原理:
无刷直流电机的运转,需要把5V,12V,或300V等直流电,变成三相电的相序,供给无刷直流电机,所以,从供电方式上,无刷直流电机就象是“三相交流电机”。
无刷直流电机与我们市电三相异步电机有个不同,就是三相异步电机的转子磁场是感应出来的,感应磁场总是与绕组旋转电磁场能同步,不必增加额外的同步措施;而无刷直流电机的转子是贴的永磁体,所以有同步措施,让三相电的频率和相位与转子永磁体磁场同步,无刷直流电机才能平稳无抖动的运转,否则电机可能不转。
所以,在不同转速下,跟踪转子永磁体相位,始终产生同频同步的三相电相序,是让直流无刷电机正常运转的关键。
产生相位差120度的正弦三相电,要不断的调整三路、或是六路PWM的占空比,这要求较高的处理速度。
给电机供相位差120度的方波,电机运转噪音虽大一些,但电机仍可以基本平稳的运转,方波驱动方式对处理器的速度要求低了很多。
所以方波驱动方式就广泛应用开来。
三相电的波形如图8-1所示,在30度到90度的时间里,C相电压摆幅只有一半,A、B相电压较高,电流主要由A相流向B相。
在这个时间段里,变成方波驱动,就可以A相接电源,B相接地,C相悬空。
同样的道理,在90度到150度时间段,A相接电源,C相接地,B相悬空。
这样在360度一个周期里,电流就有六种流向,分别是:
A->B,A->C,B->C,B->A,C->A,C->B,如图8-1中标示。
图8-1三相电时序
三个半桥分别驱动三相,如图8-2,用1表示上边PMOS管导通,此相接电源;-1表示下边NMOS管导通,此相接地;0表示两个MOSFET都截止,此相悬空。
正弦波就演变成了方波,波形如图8-1:
图t2三相电流驱动——电流由A流向C
六种电流流向如图8-3所示,每种电流流向产生的磁场方向是不一样的,六种磁场方向角差60度,磁场向量图见图8-3,按这六种时序依次给电机绕组通电,产生旋转的电磁场,吸引转子上的永磁体使转子旋转。
六次换相后,两极电机就转一圈,四极电机就转半圈。
磁极是成对出现的,所以四极电机又称两极对、或两对极电机。
图t3 方波驱动六种通电相序和磁场向量
2 过零检测
当旋转的定子电磁场与转子永磁体的磁场垂直的时候,转子的力矩最大。
所以对应于六种磁向量的每一种,转子磁场都应在定子磁场的90度的一边30度处,转到另一边30度处,如此电机的力矩才最大。
在不同的转速下,如何让轮流导通的功率管,始终保证绕组磁场、和转子永磁体磁场的这种同步的相位关系呢?
图t4旋转的电机绕组磁场与永磁体磁场的关系
简单有效的办法就是加装转子位置检测,可加光栅码盘,或者加装三个霍尔传感器,后者体积较小。
这样就可以根据霍尔传感器感知到的转子永磁体的位置换相,无论转快转慢,来至功率管输出的三相电的相位,总是能与转子保持同步。
但霍尔传感器会失效,三个霍尔传感器加上电源有五个引线,增加的引线也过多。
电机转动时,绕组在永磁体的磁场中运动,会产生感应电动势,BLDC成了三相发电机。
从三相波形图来看,悬空的那一相,电压会从正峰值的一半,逐渐变小到0,再变到负峰值的一半,或者反向变化,电压有一个过零的过程。
如果换相不正确,这一段时间电压就会过高,或过低,甚至电压不会过零。
所以方波驱动方式,可以检测悬空的那一相的感应电压是否过零,来判断换相是否正确。
过零点刚好在两次换相的中间时刻。
一般三相电机的中点是不引出线的,可以做一个能代表中点电位的电路网络,也可以采用下述的无中点检测法。
电机正常运转时,电机引出端对地的端电压,是感应相电压U与中点电压的叠加,三相中点对地电压基本在电源值的一半处波动,即VCC/2。
三相的线电压峰值应略小于电源电压,即略小于VCC/file:
///C:
/Users/hooke/AppData/Local/Temp/msohtmlclip1/01/clip_image010.gif=0.58*VCC,一般就按VCC/2来计算。
这也就是说,电机悬空端对地的电压值,以VCC/2为中心,上下波动幅度VCC/2,VCC/2处就是过零点。
当PWM波的占空比不是100%时,这里的电源电压VCC应再乘以占空比的百分数。
换相之后设置一定时器,检到过零点后,读出时间值,再定时相同时间后,换相。
也可以采用调节比较门限的方式,门限不用VCC/2,感应电压上升阶段用较高的门限,比如VCC*3/4;下降阶段用一个较低的门限,比如VCC/4,检到电压跨过门限值后就立即换相,这样处理器会省点事,电机照样正常运转,只是可能稍损失一点电源效率。
判断何时换相的另外一种方式,就是检测两相的电压值,出现两相电压相等时,就立即换相。
这种方式在PWM占空比较大时,误差较大,因为是方波驱动,电机引线端电压不是规整的正弦波。
3调速
直流电机的转速,与供电电压基本是成比的,电机某一相通电时,只要调节MOSFET导通的占空比,相当于调压,也就实现了调速。
对于方波驱动来说,上边、或下边MOSFET,只要有一边输出PWM波,另一边的MOSFET只在换相时变换开关状态即可。
比如电流由A流向B时,A半桥上臂MOS管输出PWM,B半桥下臂MOS管处在导通状态。
 升级会员
升级会员 