如何进行焊枪定义.docx
《如何进行焊枪定义.docx》由会员分享,可在线阅读,更多相关《如何进行焊枪定义.docx(18页珍藏版)》请在冰豆网上搜索。
如何进行焊枪定义
如何进行焊枪定义
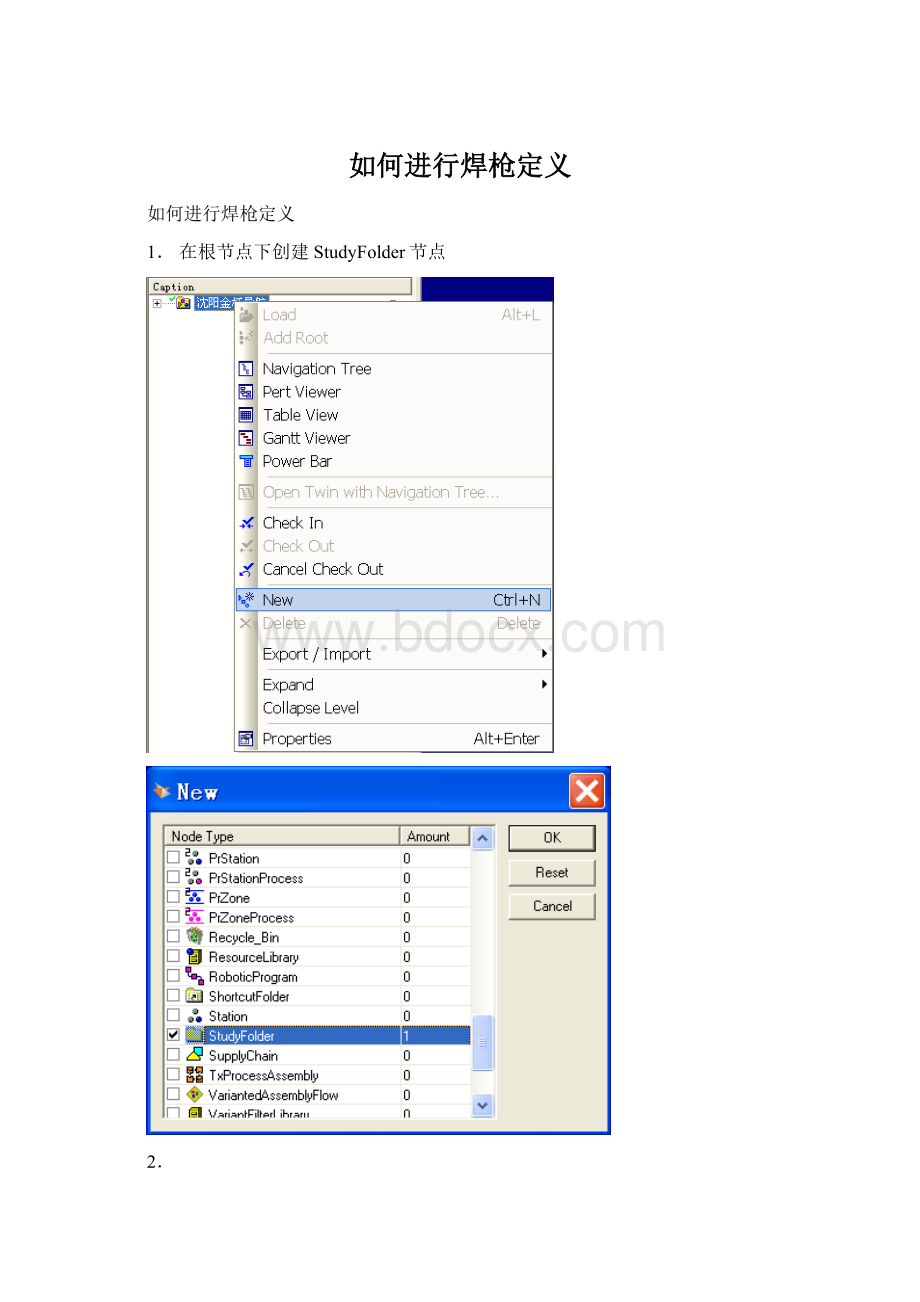
1.在根节点下创建StudyFolder节点
2.
在StudyFolder节点下创建RobcadStudy子节点
3.
将创建好的资源实例拖拽到刚刚创建好的RobCADStudy子节点下
4.
(方法1)通过Designer启动Simulate
(方法2)将Designer的节点Checkin后退出,直接启动Simulate
5.
在Simulate里面找到对应的RobcadStudy节点,选择Load
6.打开ObjectTreeViewer,如图
7.选择要编辑的焊枪,点击Modeling->SetModelingScope,在弹出对话框点击“确定”
需要编辑的焊枪节点变为可编辑,如图
8.进行机构定义,点击Kinematics->KinematicsEditor
KinematicsEditor界面如图
创建Link,点击CreateLink
修改名称为BASE/MOVE,在LinkElements中填写GraphicViewer中对应的部分
BASE在GraphicViewer中为黄色的部分;MOVE在GraphicViewer中为绿色的部分
创建后的KinematicsEditor的显示如下
创建Joints时同时选中BASE和MOVE,Joint的方向为MOVE相对于BASE的运动方向,
以本例来看先选择BASE,然后按住“Ctrl”键点击选择MOVE,生成的Joint如上图
编辑Joint的Properties,如图
需要修改焊枪动臂运动的方向,如图
动臂运动的方向由两点确定:
From---运动方向的起始点
To------运动方向的终止点
动臂相对基体的运动形式由JointType设定:
Prismatic---直线运动
Revolute---圆周运动
添加运动限制Limits:
Nolimits---无限制
Constant---固定限制,需要设置具体数值
9.设置焊枪的运动姿态POSE,点击Kinematics->JointJog
在Steering/Poses中选择相对的姿态,在Value中输入对于相对姿态的运动数值
开始设置时,JointJog中只有HOME一种相对姿态,我们假设HOME姿态时焊枪是出于闭合状态,焊枪的最大开启距离为60,则分别设置
相对姿态运动数值
OPENHOME60
CLOSEHOME0
然后分别点击Kinematics->MarkPose
10.编辑POSE,启动Kinematics->PoseEditor
在弹出的对话框内编辑POSE的姿态名称,如图
11.设置焊枪坐标系和类型
点击Kinematics-〉TOOLDefinition
在ToolDefinition对话框中选择,ToolType---Gun
TCPFrame中选择焊枪运动坐标系
在collisionswith中选择焊接干涉坚持区域
12.保存修改好的焊枪设置
焊枪设置完成后,点击Modeling->EndModeling结束编辑状态
注意,如果弹出错误对话框如下图,则说明与另外一个程序正在访问所编辑的对象
EndModeling成功后,如下图
将数据保存到数据库中,点击工具条中的“SelectivelyupdatetheeMServer”
更新数据库中的焊枪定义。
在下面的对话框中选择“确定”
如果更新数据库成功,弹出如下对话框。
注意:
定义焊枪的TCPFrame时要注意方向!
!
如下图
焊枪的TCPFrame坐标系中X轴的方向为喉深的负向,Z轴的方向指向动臂运动的方向。
如何进行X型焊枪的定义
X型焊枪的定义与C型焊枪的定义方法大致相同,不同的地方在于KinematicsEditor设置中Joint的Properties应该设置为Revolute---圆周运动。
如下图
Axis–Selecttwo下面选择转动轴的起点和终点,如下图
X型焊枪的TCPFrame方向同C型焊枪一样,如下图
 升级会员
升级会员 