二次单击事件设置.docx
《二次单击事件设置.docx》由会员分享,可在线阅读,更多相关《二次单击事件设置.docx(12页珍藏版)》请在冰豆网上搜索。
二次单击事件设置
二次单击事件设置(脚本控制)
二次单击事件的应用相当广泛,在此以一个简单的按钮控制物体的显示与隐藏为例引导用户以脚本的形式实现按钮的二次单击事件功能。
具体操作步骤如下:
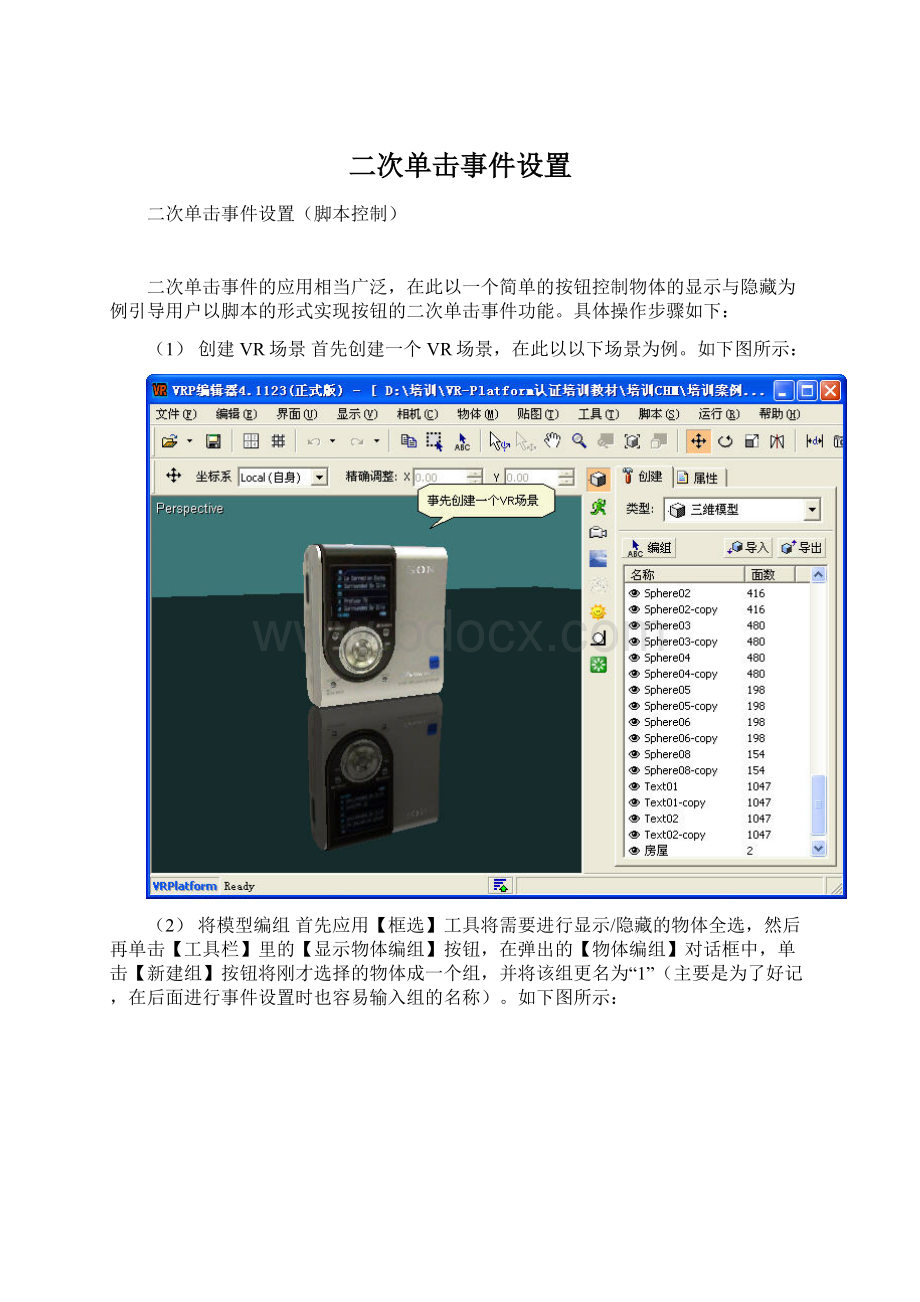
(1)创建VR场景首先创建一个VR场景,在此以以下场景为例。
如下图所示:
(2)将模型编组首先应用【框选】工具将需要进行显示/隐藏的物体全选,然后再单击【工具栏】里的【显示物体编组】按钮,在弹出的【物体编组】对话框中,单击【新建组】按钮将刚才选择的物体成一个组,并将该组更名为“1”(主要是为了好记,在后面进行事件设置时也容易输入组的名称)。
如下图所示:
(3)创建【系统初始化函数】在二维界面里创建一个按钮,然后在其【动作】|【第一次鼠标单击事件】下的【脚本】按钮上单击,在弹出的【VRP—脚本编辑器】对话框中,单击【系统函数】按钮,选择“函数名称”复选框中的【初始化】命令,最后再拖动鼠标选择初始化参数,单击鼠标右键,选择【删除】命令将初始化参数删除。
如下图所示:
(提示:
在选择了初始化参数之后,也可以通过直接按键盘上的Delete键快速删除初始化参数。
该初始化参数是用于启动VR场景里所有物体的运动控制的一个参数,该案例里不需要,所以先将其删除。
)
(4)添加【设置物体状态值】脚本还是在【系统函数】状态下,单击【插入命令行】按钮,在弹出的【VRP—命令编辑器】里单击【脚本文件】|【设置物体的状态值】命令,然后通过单击【模型名称】后面的按钮,在弹出的【选择物体】对话框中选择任意一个物体做为状态值判断依据,最后再将初始化的【状态值】设置为“0”。
如下图所示:
(提示:
状态值可以为1,也可以为0,在初始化那先假设一个状态值就可以拉。
)
(5)添加【切换物体的状态值】脚本单击【物体事件出发函数】按钮,然后单击【插入命令行】按钮,在弹出的【VRP—命令编辑器】里单击【脚本文件】|【切换物体的状态值】命令,接着再通过单击【模型名称】后面的按钮,在弹出的【选择物体】对话框中选择一个物体。
如下图所示:
(6)添加【#比较物体的状态值】脚本在“切换物体的状态值”参数后回车一次,然后再单击【插入命令行】按钮,在弹出的【VRP—命令编辑器】里单击【脚本文件】|【#比较物体的状态值】命令,接着再通过单击【模型名称】后面的按钮,在弹出的【选择物体】对话框中选择一个物体,在【比较状态值】文本框中输入“1”。
如下图所示:
(提示:
:
由于状态值可以是1或0,所以若事先将物体的状态值设置成了0,则在切换物体状态值后,物体的状态值就成了1,物体的状态值会在0或1之间进行切换。
)
(7)添加【显示/隐藏物体】脚本在“#比较物体的状态值”参数后回车一次,然后再单击【插入命令行】按钮,在弹出的【VRP—命令编辑器】里单击【显示/隐藏】|【显示/隐藏物体】命令,接着在【物体类型】栏选择“0=组”选项;在【物体名称】栏输入组的名称“1”;在【选项】栏选择“0=隐藏”选项。
如下图所示:
(8)添加【否定】脚本在“显示隐藏物体”参数后回车一次,然后再单击【插入命令行】按钮,在弹出的【VRP—命令编辑器】里单击【脚本文件】|【#否则】命令。
如下图所示:
(9)添加【显示/隐藏物体】脚本在“#否则”参数后回车一次,然后再单击【插入命令行】按钮,在弹出的【VRP—命令编辑器】里单击【显示/隐藏】|【显示/隐藏物体】命令,接着在【物体类型】栏选择“0=组”选项;在【物体名称】栏输入组的名称“1”;在【选项】栏选择“1=显示”选项。
如下图所示:
(10)添加【#结束】脚本最后再在“显示隐藏物体”参数后回车一下后,通过单击【插入命令行】按钮,在弹出的【VRP命令行编辑器】对话框中,选择【脚本文件】|【#结束】命令以结束整个脚本的撰写。
如下图所示:
(11)测试脚本功能在写好脚本文件之后,先通过单击【VRP-脚本编辑器】里的【保存】按钮存储这个脚本文件,然后按F5将场景从编辑状态切换到运行状态下,这时用户可以通过单击鼠标实现物体的隐藏,再次单击鼠标可以实现物体的显示,该按钮可以循环实现物体的显示/隐藏动作。
如下图所示:
以上二次单击事件脚本的撰写基本遵循以下思路:
注释:
(1)在【系统函数】的【初始化】状态下添加一个“设置物体的状态值”为“0”的参数。
状态值可以为0也可以为1,设置成0或1都可以。
(2)在【物体事件触发函数】下添加一个“切换物体的状态值”,切换后物体的状态值为“1”。
(3)接着在“切换物体的状态值”下添加一个“#比较物体的状态值”,此时对物体进行状态值判断。
(4)如果物体的状态值为“1”时,执行“隐藏物体”动作。
(5)“否则”
(6)如果物体的状态值为“0”时,执行“显示物体”动作。
(7)最后添加一个“结束”函数以结束整个二次单击事件脚本的撰写。
 升级会员
升级会员 